Case 13: Don’t Hit the Wall – Ultrasonic Precision Parking Challenge
Case Introduction
Over the previous 12 lessons, we mastered all abilities of the PU Robot: walking, dancing, singing, lighting effects, distance sensing, emotional expression... Now, it’s time for a real robot competition!
The rules are simple: place a "wall" (obstacle) at the end of the track. All robots start from the same line, walk straight toward the wall, and stop before hitting it. The robot that stops closest to the wall without touching it wins!
It sounds easy, but achieving "close but no collision" requires precise control of ultrasonic distance detection, walking speed, and stopping timing – this is the core challenge of today’s lesson. Students will comprehensively use the ultrasonic sensor, movement module, loop module, and variable module to write a "precision parking" program. Through multiple rounds of competition and continuous parameter tuning, they will experience the fun of engineering optimization in a competitive environment.
Teaching Preparation
| Name | Image/Description |
|---|---|
| PU Robot Kit |  |
| Programming Device (Computer) | One per group |
| Competition Track | Flat area ≥ 1m wide × 2m long, marked with a starting line tape |
| "Wall" (Obstacle) | Hard, flat cardboard/wood panel taller than the robot, covering the track width |
| Tape Measure | For measuring final parking distance (accurate to mm) |
| Timer | For recording group completion time |
| Printed "Score Sheet" (one per group) | |
| Prizes/Certificates | For 1st/2nd/3rd place (optional) |
PU Robot Biped Walking Features Review
| Feature | Description | Impact on Parking Challenge |
|---|---|---|
| Walking Method | 6-DOF servo-driven biped alternating steps | Must land fully after each step; cannot "hover mid-step" |
| Stopping Mechanism | Servos stop → hold standing posture | Fast response, no gliding, but cannot interrupt mid-gait |
| Adjustable Speed | Controlled by step size (movement range) and step frequency (loop delay) | Small steps → shorter per-step distance → easier precision, but slower |
Teacher Tip: The PU Robot is an OTTO-style biped robot, not a wheeled car. Wheeled cars have "brake inertia" – they slide after stopping. Biped robots have no gliding inertia – they stop instantly when servos cut out. The real parking challenge for bipeds is gait timing: you can’t control "half-steps", only "stop after finishing the current step".
Competition Rules
Basic Rules
| Item | Description |
|---|---|
| Goal | Robot starts at the line, walks straight, stops before the wall. Closest without touching wins |
| Track | Flat ground, starting line ~1.5m from the wall (adjustable for space) |
| Start | Press button A to launch; robot moves automatically |
| Valid Score | Shortest sensor-to-wall distance without touching the wall |
| Foul | Robot hits the wall = foul, score invalid for that round |
| Rounds | 2 practice rounds + 1 official round (adjust for time/engagement) |
Scoring Rules
| Result | Score |
|---|---|
| ≤ 1cm (no contact) | ⭐⭐⭐ Perfect Score |
| 1cm < distance ≤ 3cm | ⭐⭐ Excellent |
| 3cm < distance ≤ 5cm | ⭐ Good |
| 5cm < distance ≤ 10cm | Pass |
| > 10cm | Too far, keep trying |
| Hit wall | Foul, 0 points |
Tiebreaker: If two robots park at the exact same distance, the fastest-stopping robot wins.
Course Objectives
- Comprehensively use ultrasonic sensors, movement, loops, and variables to write a precision parking program;
- Experience the full engineering tuning cycle: test → analyze → modify → re-test, building scientific thinking;
- Develop sportsmanship and teamwork skills.
Course Introduction
Class, today is not a lesson – it’s a competition!
One rule only: Make your robot walk to the wall, stop, get as close as possible – but NEVER hit it!
You might think it’s easy – "Just walk until you see the wall and stop!" But think: between the robot receiving the "stop" command and actually stopping, there’s a process – like when you run and hear a whistle, your body keeps moving forward. That "forward drift" is the robot’s braking buffer.
The real challenge is: you must send the stop command before the robot reaches the wall, leaving a buffer. Too much buffer = too far (lose). Too little = crash (foul).
What’s the "perfect" buffer? No answer – you and your robot must find it!
Learning Exploration
Phase 1: Analyze the Challenge – Why Biped Parking Is Hard
Discussion: Biped vs Wheeled – What’s the Difference?
Wheeled Car Biped OTTO Robot Movement Continuous wheel rolling Alternating biped steps Stopping Motor stops, friction decelerates Servos stop, instant stand Gliding? Yes, wheel inertia slides No, stops immediately Parking Challenge Brake timing (glide buffer) Gait timing (uncontrollable final step) Consistency Stable Random small errors - Core Conclusion: Bipeds don’t have gliding, but they have a unique issue – you cannot precisely control step distance. The same "forward" command may vary ±0.5cm per step.
Parking Timing Analysis:
Key Discovery: Error depends on when the stop command triggers in the gait cycle:
- Trigger at step start → full extra step → large error
- Trigger at step end → tiny extra movement → small error
- This is random and uncontrollable!
- Error-Reduction Strategies:
| Strategy | Principle | Effect |
|---|---|---|
| Small Step Size | Shorter steps = smaller error even if extra step | ⭐⭐⭐ Most effective |
| Low Step Frequency | Longer intervals = more sensor detection chances | ⭐⭐ Effective |
| High Detection Rate | Shorter loop delay = faster stop trigger | ⭐⭐ Effective |
| Multiple Attempts | Run multiple rounds, pick best result | ⭐ Temporary fix |
MakeCode Programming
Basic Precision Parking Program
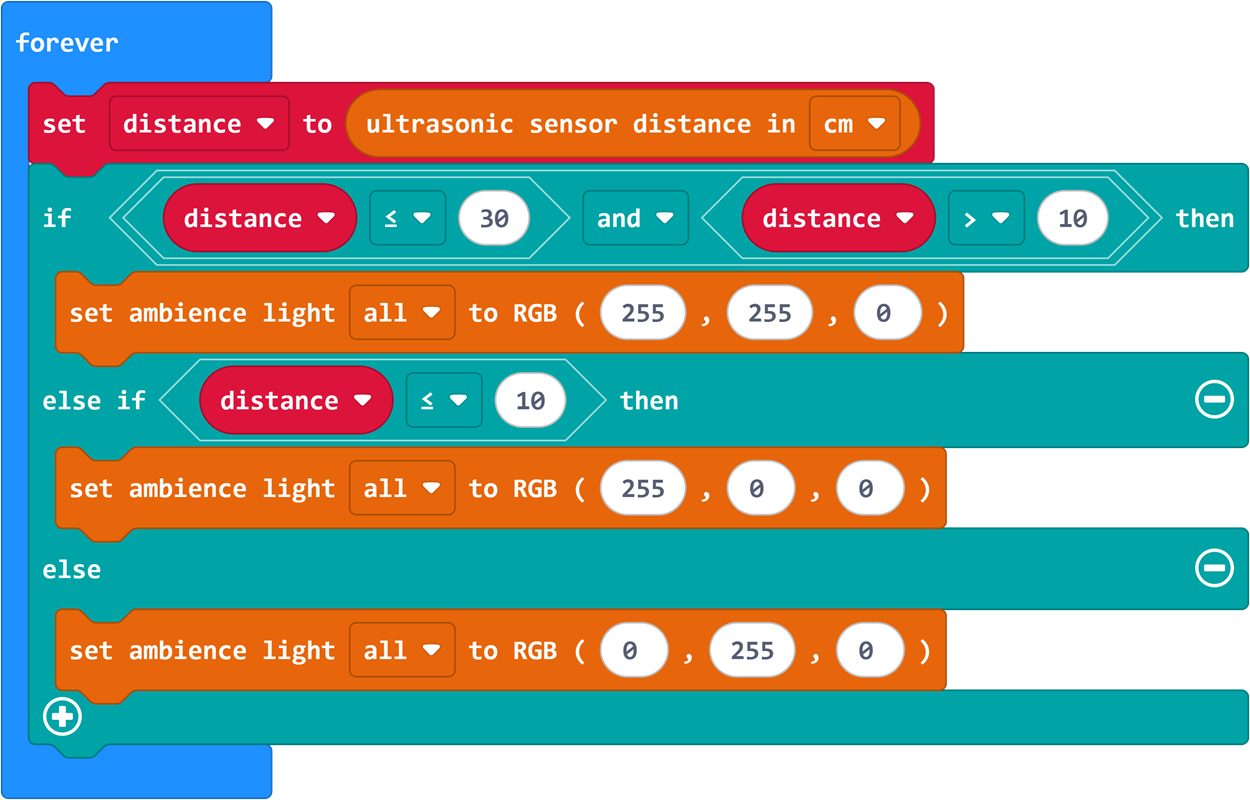
Program Link: https://makecode.microbit.org/_TRMWvyP1AXsM
This is a basic example – you can optimize performance with advanced coding!
Phase 4: Official Competition
- Pre-Competition Prep:
- Groups confirm final parameters (most stable from practice)
- Place robots behind the starting line, facing the wall, aligned straight
- Judge (teacher) confirms equal starting-line-to-wall distance
- Official Round Flow (3 attempts per group):
Judge: "Ready" → Groups set robots
Judge: "3, 2, 1, GO!" → All press A simultaneously
Robots walk forward... (class cheers)
Robot stops (or crashes)
Judge measures: robot head → wall (mm precision)
Score recorded → Next group
Post-Match Analysis:
- Announce rankings and award certificates
- Champion Share: What parking threshold and step size did you use? What was your key tuning discovery?
- Foul Group Reflection: Why did you crash? What parameter would you change?
- Class Discussion: Why do the same parameters sometimes work well and sometimes poorly?
After-Class Extension
Challenge 1: "Continuous Parking Master" – After parking, automatically back up to start, then park again. 3 consecutive parks ≤ 3cm = "Master Level"! Tip: Use fixed delays for backward movement;
Challenge 2: "Distance Keeper" – Robot follows an obstacle at a fixed 5cm distance. Obstacle moves forward → robot follows; stops → robot stops; backs up → robot backs up. Tip: If distance >5cm → forward; <5cm → backward; =5cm → stop;