案例十一:手势识别挖掘车
案例简介
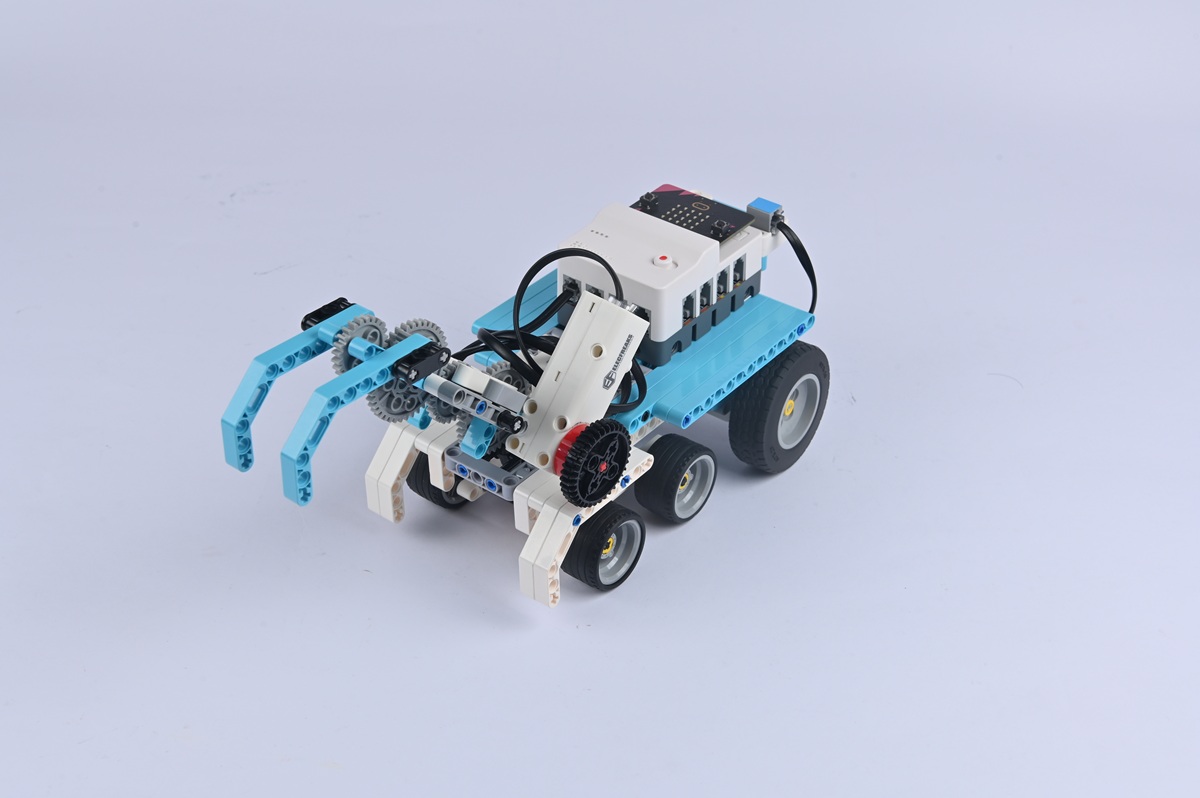
制作一个手势识别挖掘车,通过手势控制挖掘车的行驶和动作。
教学准备
| 名称 | 图示 |
|---|---|
| 哪吒Pro AI机械动力套装 |  |
教学目标
完成手势识别挖掘车的搭建,掌握挖掘车底盘、挖掘臂(含传动部件)与手势识别传感器的组装与连接方法,实现通过手势控制挖掘车的移动、挖掘臂升降和铲斗开合。
理解挖掘车 “多动作协同” 的原理(如移动 + 挖掘臂动作),认识手势指令与挖掘动作的对应关系,学会编程协调不同部件的动作。
在调试挖掘臂活动范围、铲斗开合角度的过程中,培养动手能力、逻辑思维和空间想象能力,学会解决挖掘动作卡顿、铲斗无法铲起 “模拟土壤”(如小石子)的问题。
激发对工程机器人的兴趣,感受 “智能挖掘” 的技术魅力,建立 “科技助力工程建设” 的认知。
故事导入
整理仓库时,大家发现储备的能量水晶快用完了。“水晶藏在东边的矿山里。” 阿极调出地图,“但挖掘车‘钻地鼠’罢工了,它需要手势指挥挖掘方向。” 在矿山入口,孩子们看到钻地鼠的钻头卡在岩石里。“当你们向左挥手,它就向左挖;向下挥手,就会加深挖掘。” 阿极演示着,“就像指挥家指挥交响乐,每个手势都有特殊含义。”
学习探究
挖掘车的挖掘臂和铲斗分别由什么部件(如电机、舵机)控制?尝试用手势指令(如向前挥 = 挖掘臂下降、向后挥 = 挖掘臂上升、握拳 = 铲斗闭合)控制挖掘动作,如何确保动作连贯?
挖掘车在移动时同时控制挖掘臂,会出现动力不足的情况吗?如何通过编程优化(如优先保证移动动力,再控制挖掘臂)?
如果铲斗无法紧密闭合(导致 “模拟土壤” 漏出),可能是哪些原因导致的?(如铲斗部件连接松动、舵机转动角度不足)
对比真实挖掘车与模型的结构,真实挖掘车的挖掘臂如何实现 “大力量挖掘”?(提示:参考液压系统)模型的传动部件模拟了真实挖掘车的哪个功能?