案例五:直升机
案例简介
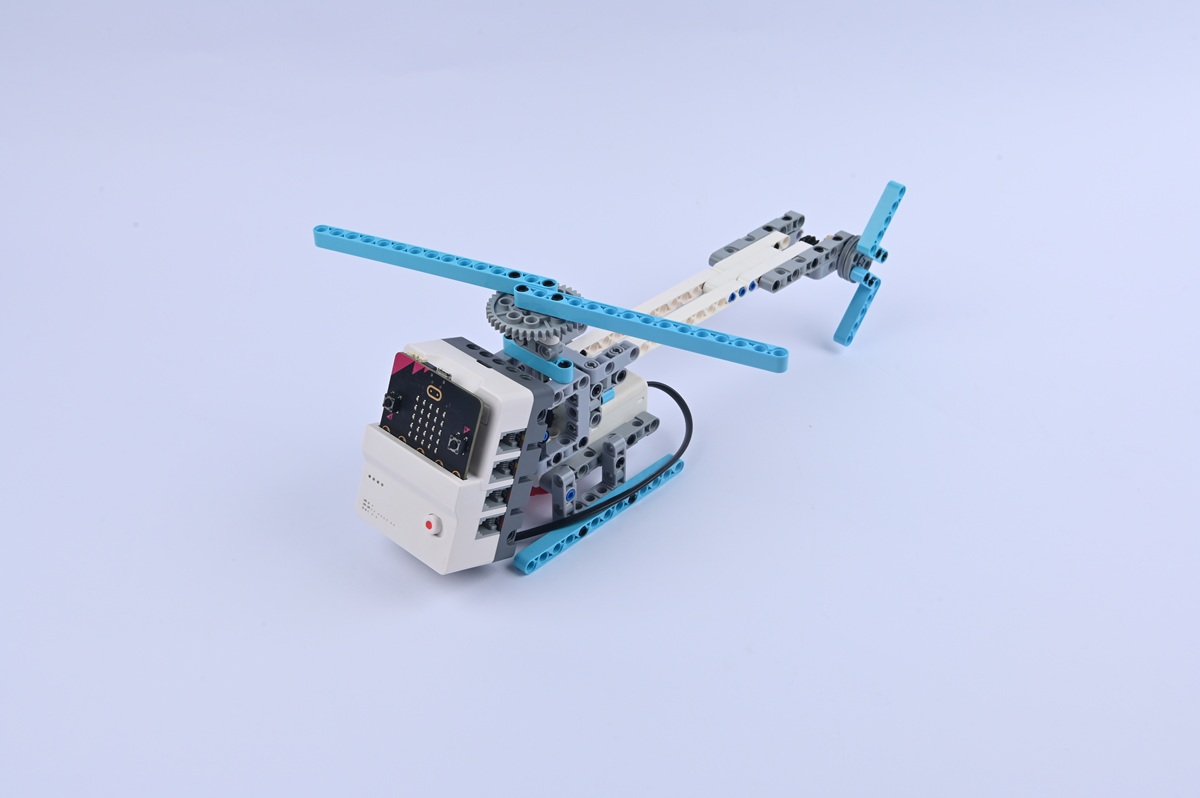
制作一架直升机,通过齿轮传动让螺旋桨转动起来。
教学准备
| 名称 | 图示 |
|---|---|
| 哪吒Pro AI机械动力套装 |  |
教学目标
完成直升机模型的搭建,掌握齿轮传动结构与螺旋桨的组装方法,能正确连接动力部件,实现螺旋桨的稳定转动。
理解齿轮传动如何将电机动力传递到螺旋桨,认识螺旋桨转动与 “升力” 模拟的关联,了解齿轮转速对螺旋桨转动速度的影响。
在调试齿轮咬合、螺旋桨安装角度的过程中,培养动手能力和细节把控能力,学会解决螺旋桨转动卡顿、偏心的问题。
激发对航空航天技术的兴趣,感受机械结构与飞行原理的关联,建立 “科技实现飞行梦想” 的初步认知。
故事导入
跳跳重新开始巡逻的同时,天空传来奇怪的嗡鸣。负责侦查的直升机机器人 “旋翼” 歪歪扭扭地坠落在屋顶,螺旋桨断了。“它本来能飞到云层上观察野兽动向的!” 瞭望塔的机器人指着天空,“现在我们像瞎了眼一样!” 阿极展开直升机的机械图:“看这组齿轮,发动机的动力要通过它们传到螺旋桨。就像自行车链条带动车轮,缺了它可不行。”
学习探究
直升机模型中,电机的动力通过几组齿轮传递到螺旋桨?尝试更换不同齿数的齿轮,螺旋桨的转动速度会发生什么变化?
螺旋桨的安装角度对其 “模拟升力” 有影响吗?如果螺旋桨安装过松或角度倾斜,会出现什么问题(如转动时晃动、噪音大)?
对比真实直升机与模型的结构,模型中的齿轮传动模拟了真实直升机的哪个核心部件(如减速器)?为什么真实直升机需要减速器?
如果想让直升机模型实现 “转向”,可以在现有结构上添加什么部件?(提示:参考真实直升机的尾桨)