案例七:手势识别赛车
案例简介
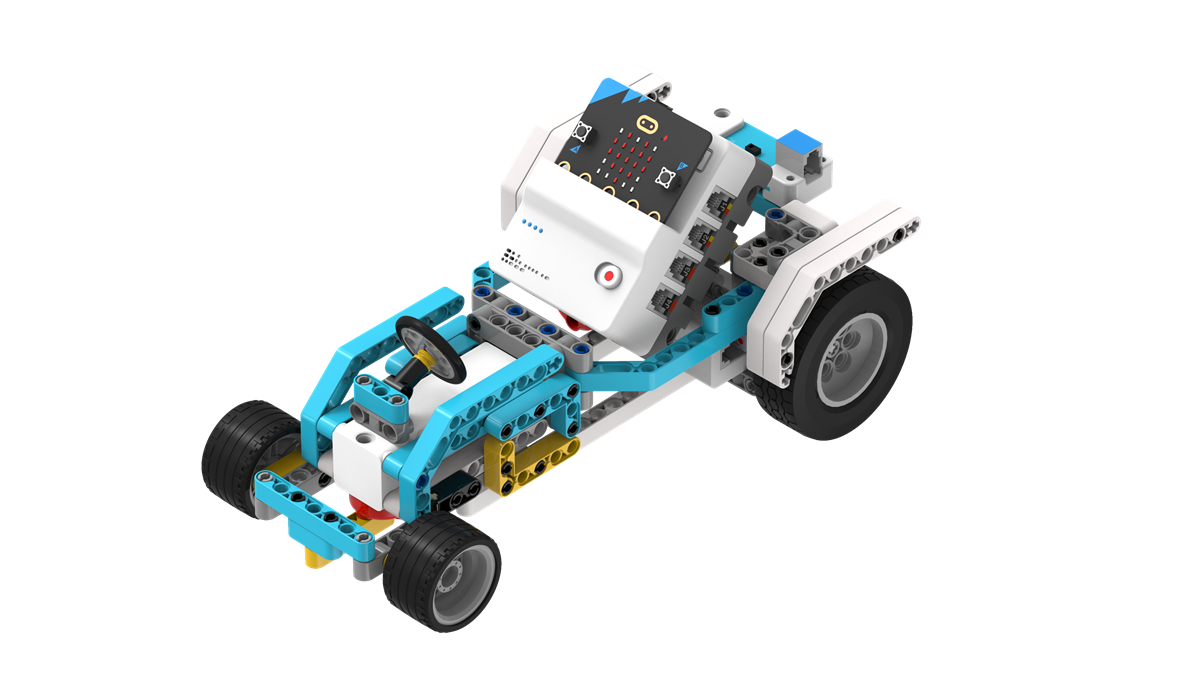
制作一个手势识别赛车,通过手势控制小车行驶。
教学准备
| 名称 | 图示 |
|---|---|
| 哪吒Pro AI机械动力套装 |  |
教学目标
完成手势识别赛车的搭建,掌握赛车底盘、电机与手势识别传感器的组装与连接方法,实现通过手势控制赛车的前进、转弯、停止。
理解手势识别传感器的工作原理(如捕捉手部动作轨迹),学会编程将特定手势(如向前挥、向右挥)与赛车动作关联。
激发对智能交互技术的兴趣,感受 “手势控制” 的便捷性,建立 “人机交互多样化” 的认知。
故事导入
加固栅栏时锯倒的几根粗圆木不小心挡住了通往指挥中心的小路,众人正发愁怎么挪开,交通机器人推着一辆流线型小车跑过来:“试试‘闪电’赛车!它能沿着栅栏外侧的小路绕过去报信,可现在只会在原地画圈。” 孩子们看到赛车的手势传感器闪着红光。阿极捡起一根树枝在车前方挥舞:“它靠识别手势行动 —— 向前挥是加速,向右摆是转弯,就像给它指路的魔法棒。你看传感器镜头被木屑挡住了,难怪认不出指令。” 远处的齿轮野兽发出咆哮,阿极催促道:“得快点让它跑起来,指挥中心还等着我们报告栅栏加固情况呢!”
学习探究
手势识别传感器需要在什么距离范围内才能准确识别手势?距离过远或过近会出现什么问题(如识别不到、误识别)?
尝试设置不同的手势指令(如向前挥 = 前进、向后挥 = 后退、向左挥 = 左转),编程时如何确保手势与赛车动作 “一一对应”?
如果赛车出现 “误动作”(如未做手势却移动),可能是哪些原因导致的?(如环境光线过强、手势挥动太快)
对比手势控制与遥控器控制赛车的方式,手势控制的优势和不足分别是什么?(如无需手持设备、受环境干扰大)