案例九:手势识别推土机
案例简介
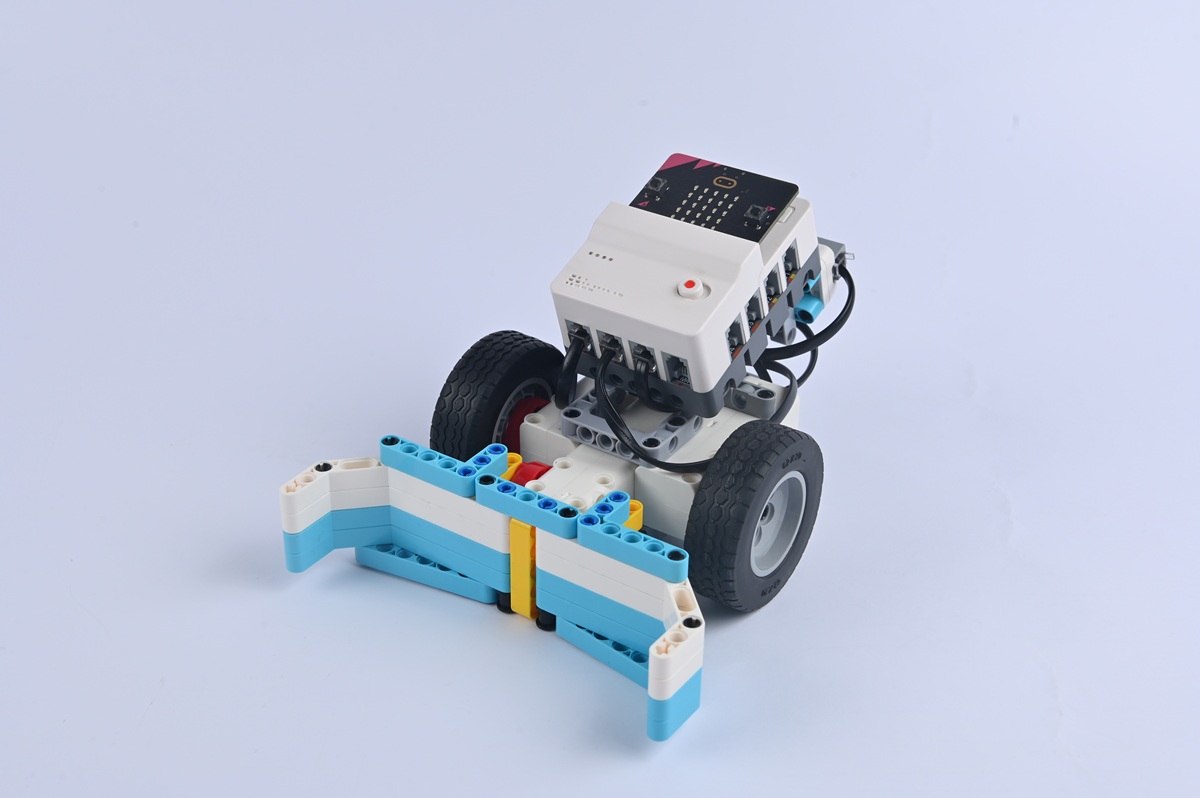
制作一个手势识别推土机,通过手势控制推土机的前进方向和铲斗抬升和放下。
教学准备
| 名称 | 图示 |
|---|
| 哪吒Pro AI机械动力套装 |  |
教学目标
完成手势识别推土机的搭建,掌握推土机底盘、推土铲(含传动部件)与手势识别传感器的组装与连接方法,实现通过手势控制推土机的前进、后退、推土铲升降。
理解手势识别传感器与电机(控制底盘、推土铲)的协作原理,学会编程将特定手势与推土机的不同动作关联。
在调试推土铲升降幅度、手势与动作对应关系的过程中,培养动手能力、空间思维和问题解决能力,学会优化推土机的操作流畅性。
激发对工程机械设备的兴趣,感受 “智能控制” 在工业场景的应用潜力,建立 “小模型模拟大工程” 的认知。
故事导入
第二天清晨,旋翼报告:栅栏外堆积了很多碎石,挡住了跳跳的巡逻路线。“该轮到‘铁铲’出场了!” 工程队机器人指着陷在碎石堆里的推土机,“它能按手势前进后退,现在却像块石头。”
孩子们发现铁铲的手势传感器被灰尘覆盖了。“就像人类眼睛进了沙子看不清东西。” 阿极笑着说,“清理干净后,试试向前挥动手臂 —— 这是让它前进的指令。”
学习探究
推土机的推土铲升降需要依赖哪个部件(如电机、舵机)?如何通过手势指令(如向上挥 = 升铲、向下挥 = 降铲)控制这个部件的动作幅度?
如果推土机在前进时推土铲无法正常升降,可能是哪些原因导致的?(如推土铲传动部件卡住、电机动力不足)
对比真实推土机与模型的操作方式,真实推土机的驾驶员如何控制推土铲?模型的手势控制模拟了真实操作的哪个优势(如远距离控制)?
搭建步骤