案例十:手势识别机械臂
案例简介
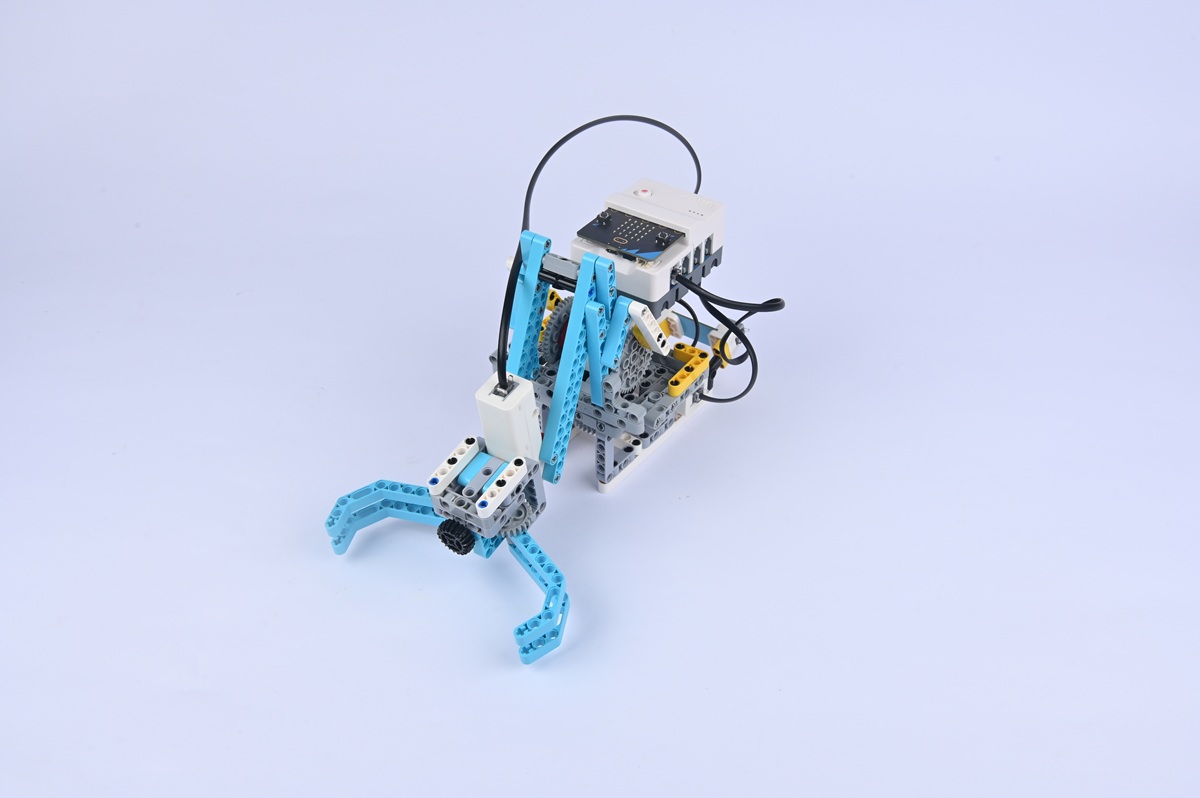
制作一个手势识别机械臂,通过手势控制机械臂的动作。
教学准备
| 名称 | 图示 |
|---|---|
| 哪吒Pro AI机械动力套装 |  |
教学目标
完成手势识别机械臂的搭建,掌握机械臂关节(含舵机)、夹持部件与手势识别传感器的组装与连接方法,实现通过手势控制机械臂的关节转动、夹持动作。
理解机械臂 “多关节协同” 的特点,认识手势识别与关节动作的对应关系,学会编程设置不同关节的转动角度。
在调试关节转动范围、夹持部件松紧度的过程中,培养动手能力、空间逻辑思维和问题解决能力,学会解决机械臂夹持不稳、关节卡顿的问题。
激发对机器人技术的兴趣,感受 “机械臂替代人手” 的可能性,建立 “科技延伸人类能力” 的认知。
故事导入
清理完碎石,众人来到被损坏的仓库。货架上的零件散落一地,负责整理的机械臂机器人 “巧手” 垂着胳膊发呆。“它本来能按手势抓取不同零件的!” 仓库管理员举着螺丝叹气,“现在连最轻的螺母都夹不住。” 阿极操控着机械臂的关节:“看这三个自由度的关节,就像人类的肩膀、手肘和手腕。你们要让它重新理解‘抓’和‘放’的手势密码。”
学习探究
机械臂有几个可活动的关节?每个关节由什么部件(如舵机)控制?尝试用不同手势(如左手挥 = 控制大臂、右手挥 = 控制小臂)分别控制不同关节,如何确保动作不冲突?
机械臂的夹持力度由什么决定?(如舵机的扭矩、夹持部件的材质)如果夹持力度过大,会损坏 “被夹物体”(如泡沫块)吗?如何通过编程调整?
如果机械臂的某个关节无法达到预设角度,可能是哪些原因导致的?(如舵机功率不足、关节部件卡住)
对比人类手臂与机械臂的结构,机械臂的关节模拟了人类手臂的哪些部位(如肩膀、手肘、手腕)?两者在灵活性上有什么差异?