案例四:震动机器人
案例简介
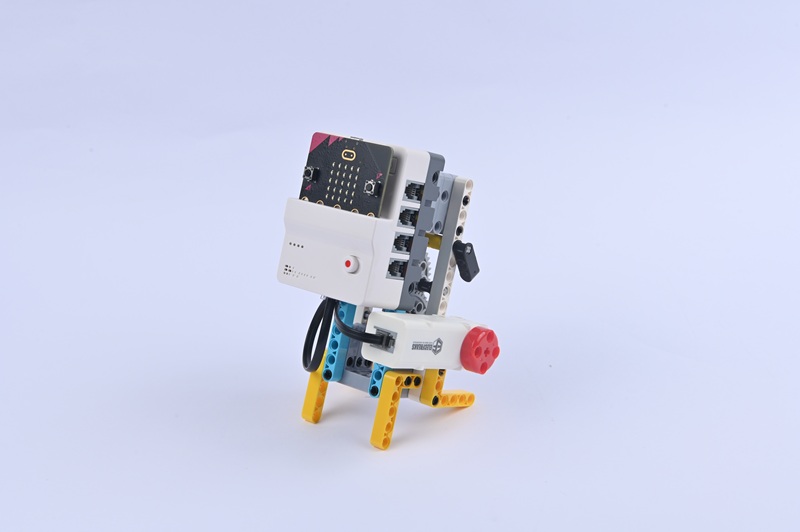
制作一个震动机器人,通过震动让机器人移动。
教学准备
| 名称 | 图示 |
|---|---|
| 哪吒Pro AI机械动力套装 |  |
教学目标
完成震动机器人的搭建,掌握电机与偏心部件(如偏心轮)的组装方法,理解震动产生的原理,实现机器人的移动功能。
认识 “偏心运动产生震动” 的物理现象,了解电机转速与震动强度、机器人移动速度的关联。
在调试偏心部件位置、电机转速的过程中,培养观察能力和实验探究能力,学会分析震动大小对机器人移动稳定性的影响。
感受 “非常规运动方式” 的创意,激发对物理现象与机械设计结合的兴趣,建立 “问题导向” 的设计思维(如针对松软地面用震动移动)。
故事导入
修好旺财,看着它重新把机械羊赶进羊圈后,众人跟着阿极来到村庄边缘的沙地。负责巡逻边界的震动机器人 “跳跳” 正趴在沙地上微微颤抖,却怎么也挪不动身子。“沙地太软,普通行走方式根本行不通。” 阿极踢了踢脚下的沙子,“跳跳的秘密武器是肚子里的齿轮加速结构和凸轮 —— 大齿轮带动小齿轮转得飞快,让凸轮像偏心的小轮子一样疯狂转动,产生的震动才能让它在沙面上蹦跳着前进。” 他拆开跳跳的外壳,指着卡住的齿轮组:“你看,这里的加速齿轮卡住了,凸轮转得比蜗牛还慢,自然没法产生足够的震动。得让齿轮重新咬合,让小齿轮跟着大齿轮高速转动起来。” 远处突然卷起沙尘,阿极的传感器发出尖锐警报:“齿轮野兽快到边界了,必须让跳跳恢复巡逻!”
学习探究
震动机器人的 “震动” 是如何产生的?如果去掉电机上的偏心部件(如偏心轮),机器人还能移动吗?为什么?
调整偏心部件的重量或安装位置(如靠近电机轴一端、远离一端),机器人的震动强度和移动方向会发生什么变化?
电机转速调快或调慢时,机器人的移动速度和稳定性有什么不同?尝试在不同地面(如桌面、地毯)测试,观察移动效果的差异。
对比震动机器人与四足 / 双足机器人的移动方式,震动移动适合在哪些场景(如狭窄缝隙、松软沙地)使用?