Case 11 语音识别小车
简介
本课程旨在引导学生使用哪吒发明家套装V2和AI扩展包来制作一个能够通过语音指令控制行驶路线的智能小车。通过这个项目,学生将学习如何将语音识别技术与机器人控制相结合,培养他们的STEAM(科学、技术、工程、艺术、数学)技能,提高问题解决和创造力。

教学目标
- 了解语音识别技术的基本原理和应用。
- 了解语音识别技术的发展历程。
- 学会构建一个具有语音识别功能的智能小车。
- 提高团队协作和创造性解决问题的能力。
教学准备
电脑
教学过程
引入
教师可以引导学生思考以下问题:语音识别技术的应用前景。
大家好,今天我们将进入科技的世界,学习如何使用哪吒发明家套装V2和AI扩展包制作一个令人兴奋的语音识别小车。你是否曾想过只需用声音来控制小车的行驶路线?这是我们今天要一起解决的问题,让我们开始这个充满创意和技术挑战的项目。
探究
分组讨论,让学生思考如何用AI摄像头来制作一个语音识别小车。
- 什么是语音识别技术,它如何应用于智能小车控制系统?
- 如何设计并实现语音指令来控制小车的行驶路线?
实践
分组动手,按照自己的设计方案,用积木材料来制作一个语音识别小车。
按照自己的设计方案,用积木材料来制作一个语音识别小车。
示例
搭建步骤


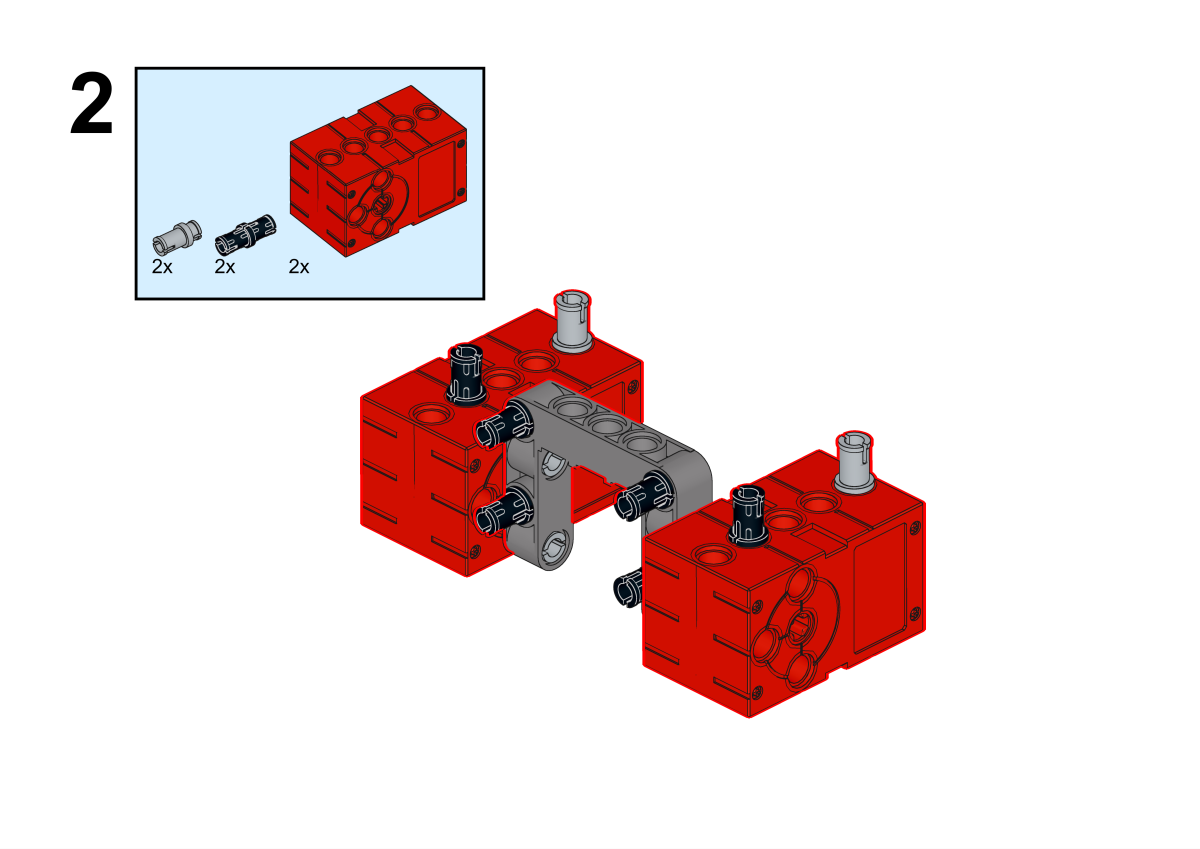
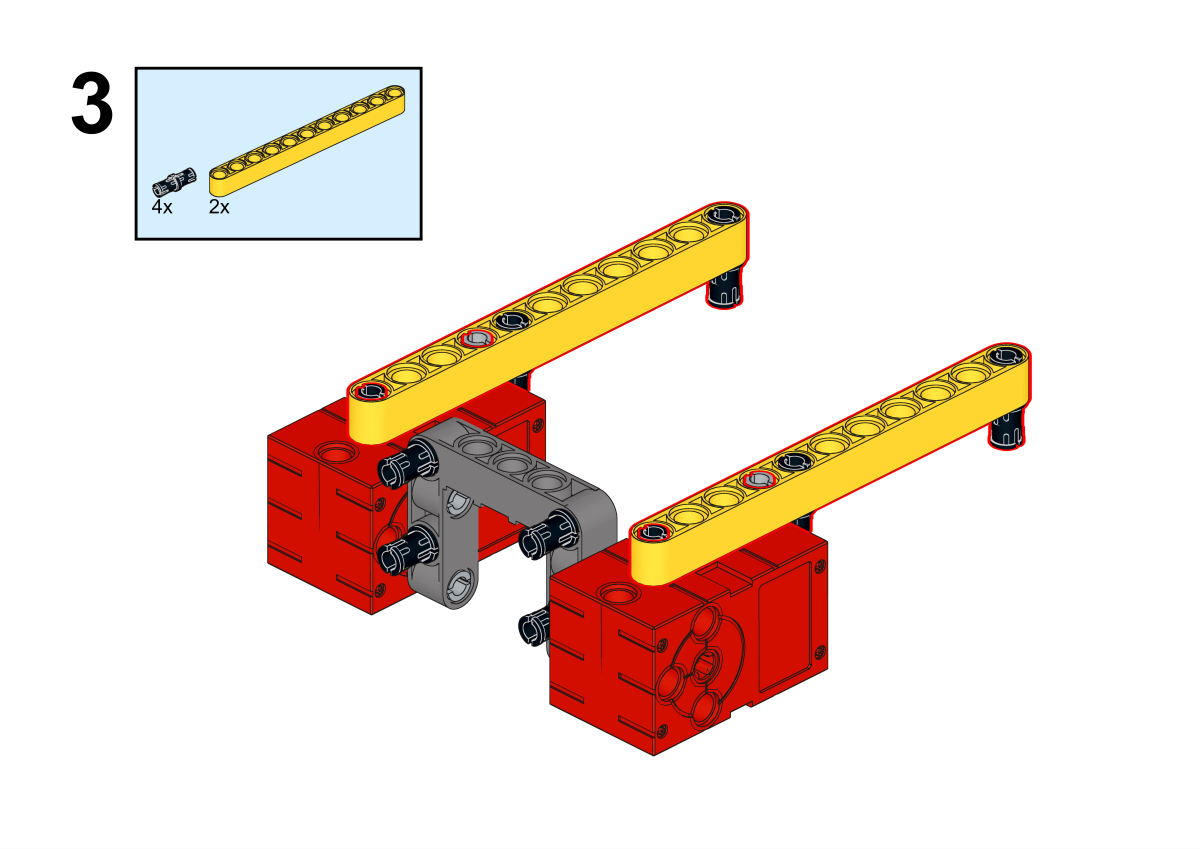






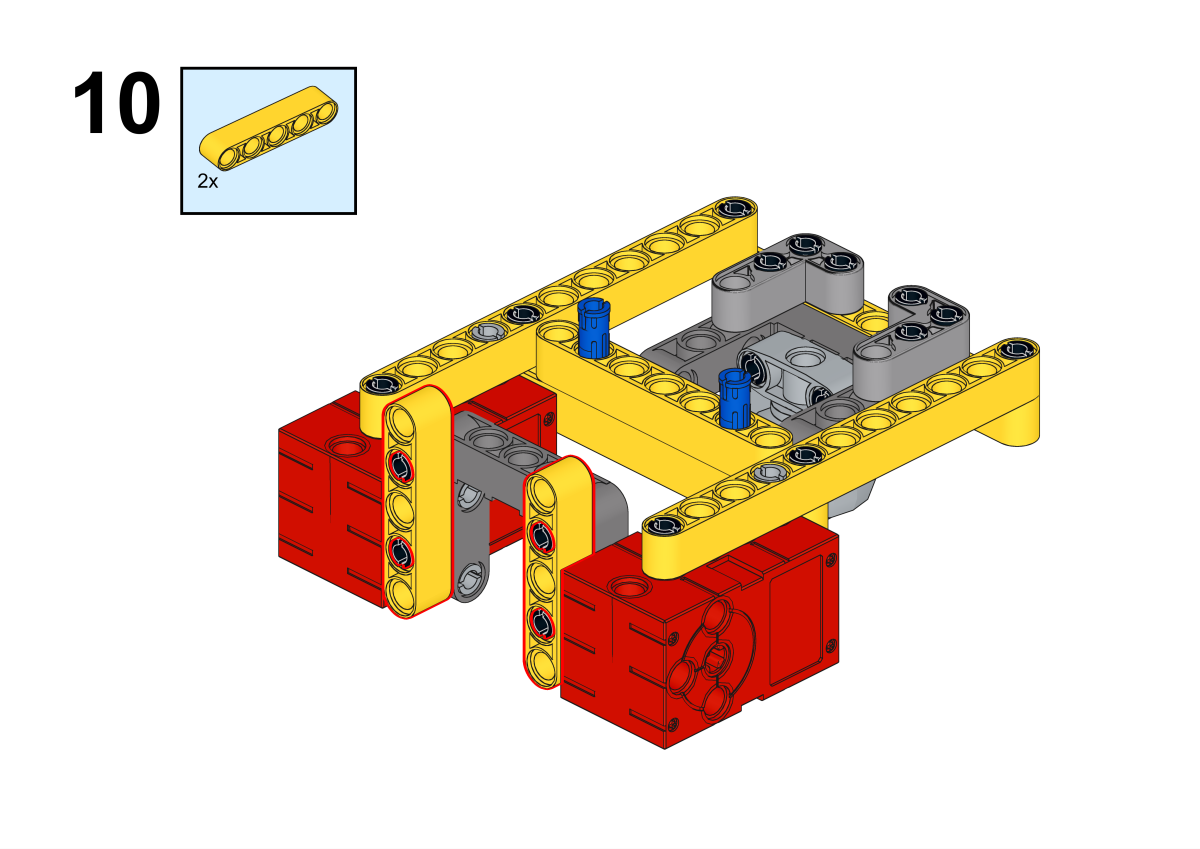








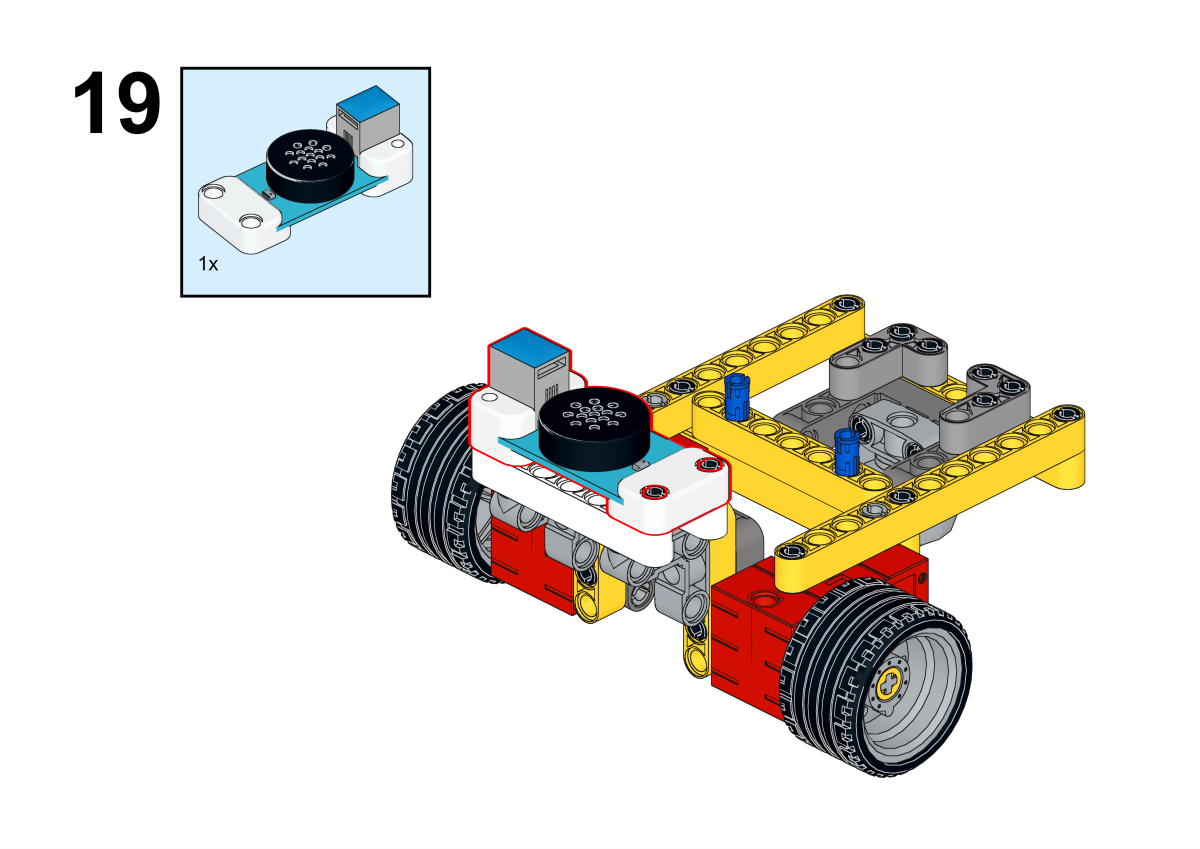

搭建完成

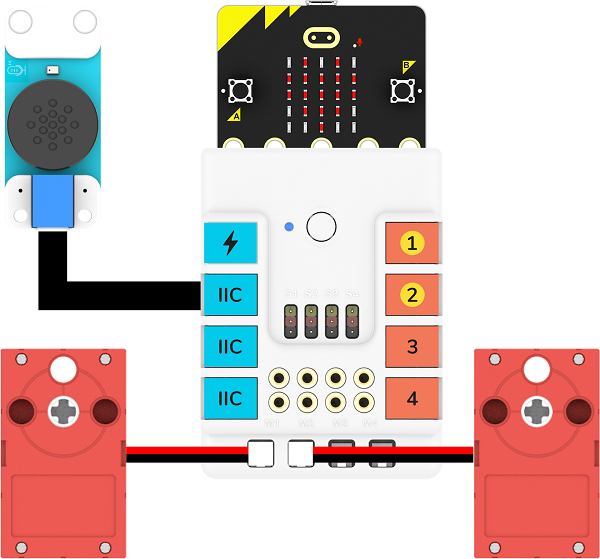
硬件连接
将两个电机分别连接到哪吒扩展板的M1和M2接口,将语音识别传感器连接到哪吒扩展板的IIC接口。
软件编程
打开编程平台makecode
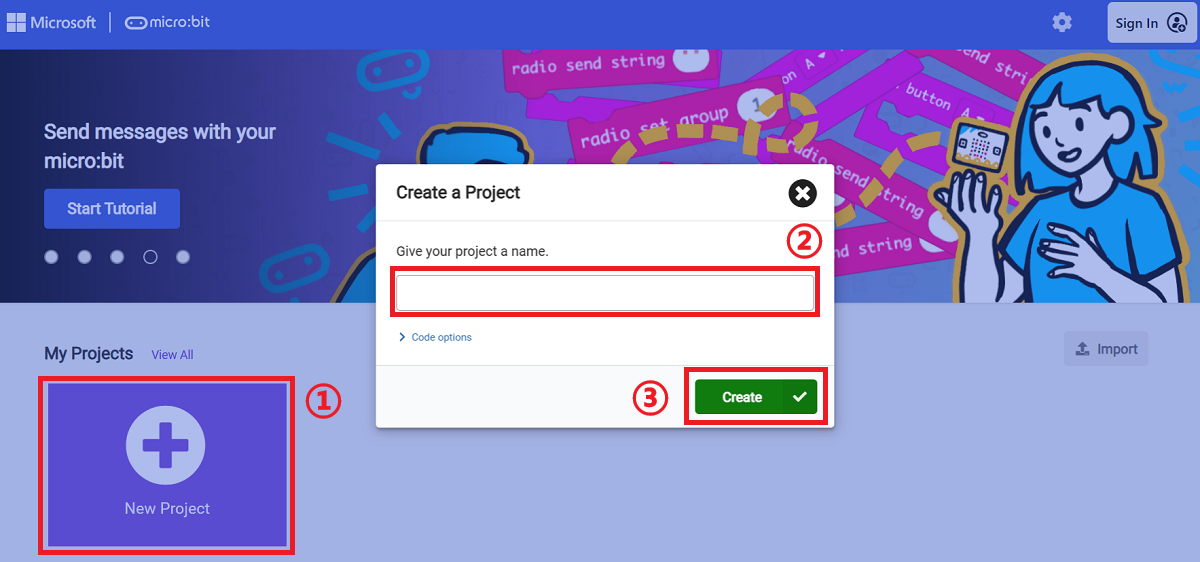
新建项目
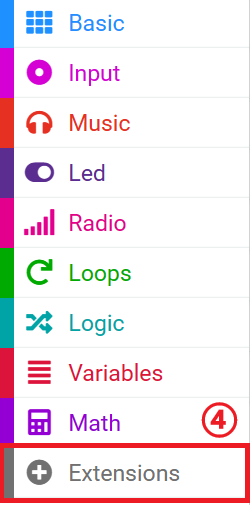
点击扩展
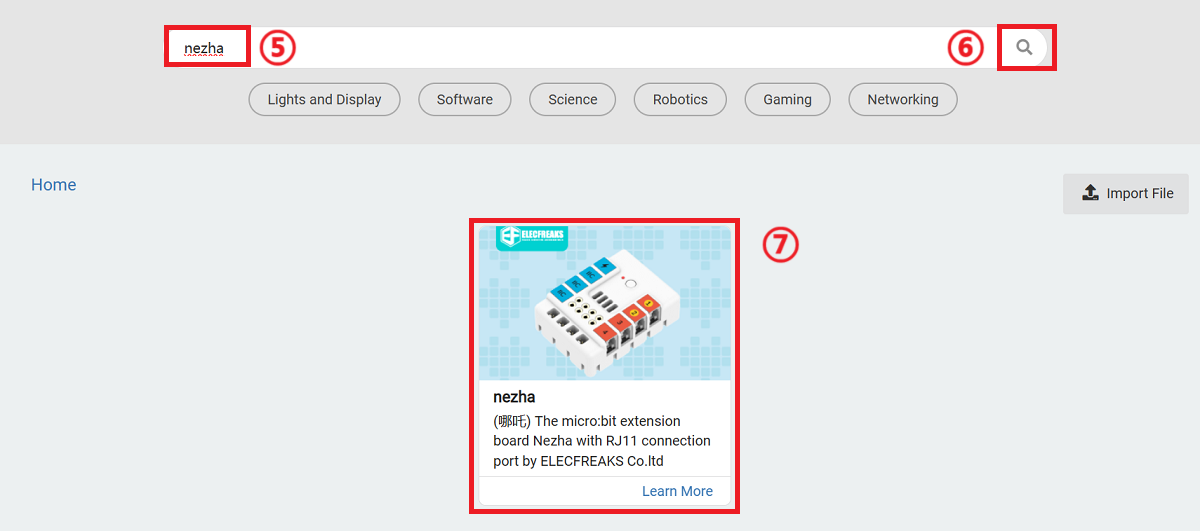
在搜索栏搜索nezha添加哪吒多功能扩展盒的扩展库
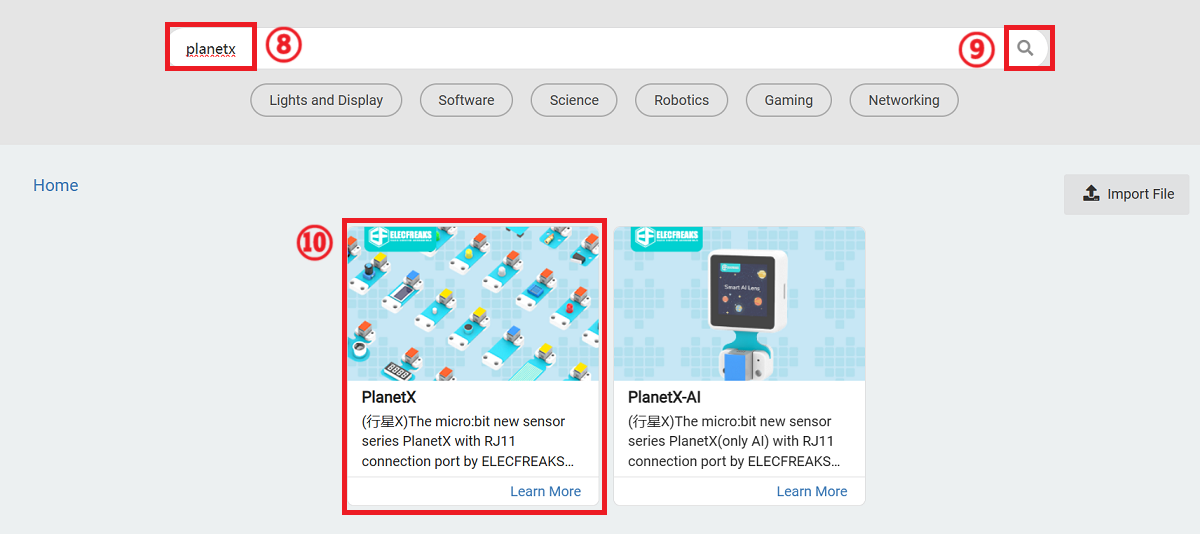
在搜索栏搜索planetx添加行星系列传感器的扩展库
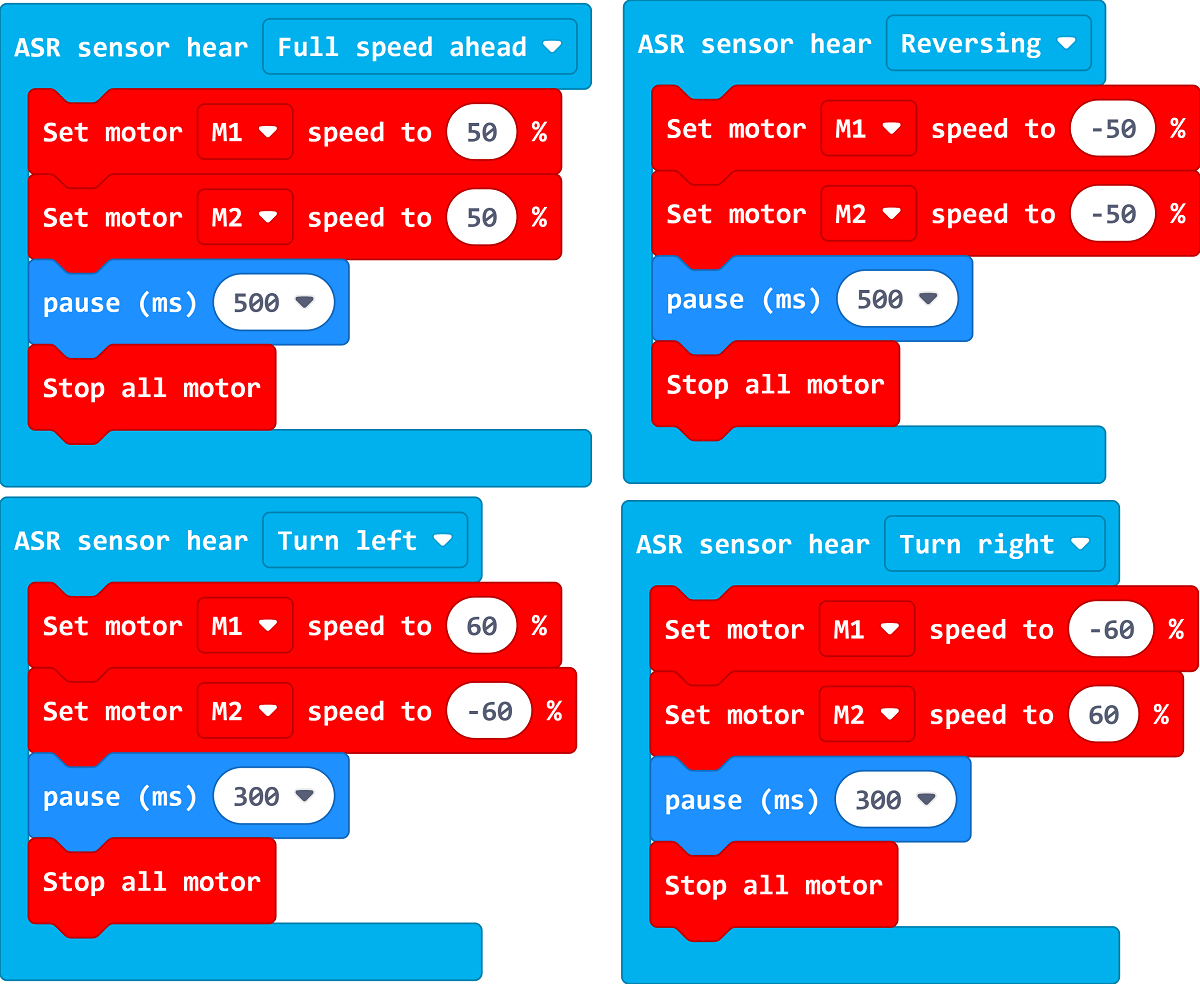
编写程序
程序链接:https://makecode.microbit.org/_CuVMyCEKA9Um
你也可以通过以下网页直接下载程序。
团队合作与展示
学生分成小组,共同完成案例的制作和程序编写。
鼓励学生之间相互合作、交流和分享经验。
每个小组有机会向其他小组展示他们制作的案例。
示例案例效果
通过语音即可控制小车的行驶路线。

反思
分组分享,让每组的学生分享自己的制作过程和心得,总结自己遇到的问题和解决办法,评价自己的优点和不足。-->
扩展知识
语音识别技术的发展历程
语音识别技术的发展历程可以追溯到20世纪中期,经历了多个阶段和重大突破,以下是其主要发展里程碑:
20世纪50年代和60年代:
早期的语音识别研究主要集中在模拟声音的基本原理和声学特征的提取。 1952年,贝尔实验室的研究人员Davis和Biddulph开发了世界上第一个语音识别系统"Audrey",它能够识别数字。 20世纪70年代和80年代:
这一时期见证了语音识别技术的重大进步,包括更复杂的声学特征提取方法和模式匹配算法。 隐马尔可夫模型(Hidden Markov Model,HMM)被引入,成为语音识别领域的标准。 1971年,IBM的研究人员开发了Shoebox,这是第一个商用语音识别系统,用于识别数字。 20世纪90年代:
随着计算机性能的提高和更多的研究投入,语音识别的准确度显著提高。 统计语言模型的引入,以改善识别结果的上下文理解。 出现了更多的商用语音识别系统,用于电话系统和自动化客户服务。 21世纪初:
随着深度学习技术的兴起,语音识别取得了重大突破。深度神经网络(DNN)被用于声学建模,大大提高了准确性。 2009年,Microsoft推出了Xbox Kinect,该系统具有语音识别功能,标志着语音识别技术在消费电子产品中的应用。 近年来:
自2010年代以来,深度学习技术的进一步发展和大数据的可用性使语音识别取得了巨大的突破。 云计算和人工智能平台(如亚马逊的Alexa、苹果的Siri、谷歌的Google Assistant等)使语音识别成为日常生活中的常见技术,用于智能助手、智能家居、汽车导航等领域。 开源项目(如CMU Sphinx、Kaldi等)和云端API使开发者能够更容易地构建和集成语音识别功能。 总的来说,语音识别技术的发展历程经历了多个关键时期,从早期的声学特征提取到隐马尔可夫模型的引入,再到深度学习的应用,它不断地改善了准确性和可用性,成为了现代科技中不可或缺的一部分。未来,随着技术的不断发展,语音识别技术将继续在各个领域发挥重要作用。