Case 27 智能巡线小车
简介
本次课程将带领学生制作一辆巡线车,利用哪吒发明家套装V2和双路巡线传感器,使车辆能够沿着黑线行驶。通过该项目,学生将学习有关巡线传感器的工作原理和应用,培养问题解决能力和创造性思维,并了解机器人技术在自动导航中的应用。

教学目标
- 了解双路巡线传感器的工作原理和信号输出。
- 学习如何搭建巡线车的机械结构,并将双路巡线传感器集成到车身中。
- 掌握如何编写程序使巡线车能够根据传感器信号沿着黑线行驶。
- 培养学生的团队合作精神、创造力和解决问题的能力。
教学准备
教学过程
引入
向学生介绍智能巡线车制作的背景和目标,激发学生的兴趣和好奇心。
你有没有看过机器人或小车沿着黑线行驶的情景?你有没有想过这些机器人是如何知道要沿着黑线走的呢?这就涉及到了巡线传感器的工作原理。巡线传感器能够检测到黑线,并通过发送信号告诉小车要朝着什么方向行驶。
在本次课程中,我们将深入了解双路巡线传感器的工作原理,并将其应用到巡线车的制作中。我们将一步步搭建巡线车的机械结构,将双路巡线传感器安装到车身上,并学习如何编写程序,让巡线车能够根据传感器信号自动沿着黑线行驶。
探究
分组讨论,让学生思考如何用积木材料来制作一辆智能巡线车。
双路巡线传感器是什么?它是如何工作的?如何通过检测黑线来输出信号?
如何搭建巡线车的机械结构?如何将双路巡线传感器集成到车身中?
如何编写程序使巡线车能够根据传感器信号沿着黑线行驶?
遇到多条或交叉的黑线时,巡线车将如何作出决策并调整行驶方向?
如何调试和优化巡线车的性能,使其能够稳定地沿着黑线行驶?
实践
分组动手,按照自己的设计方案,用积木材料来制作一辆智能巡线车。
按照自己的设计方案,用积木材料来制作一辆智能巡线车。
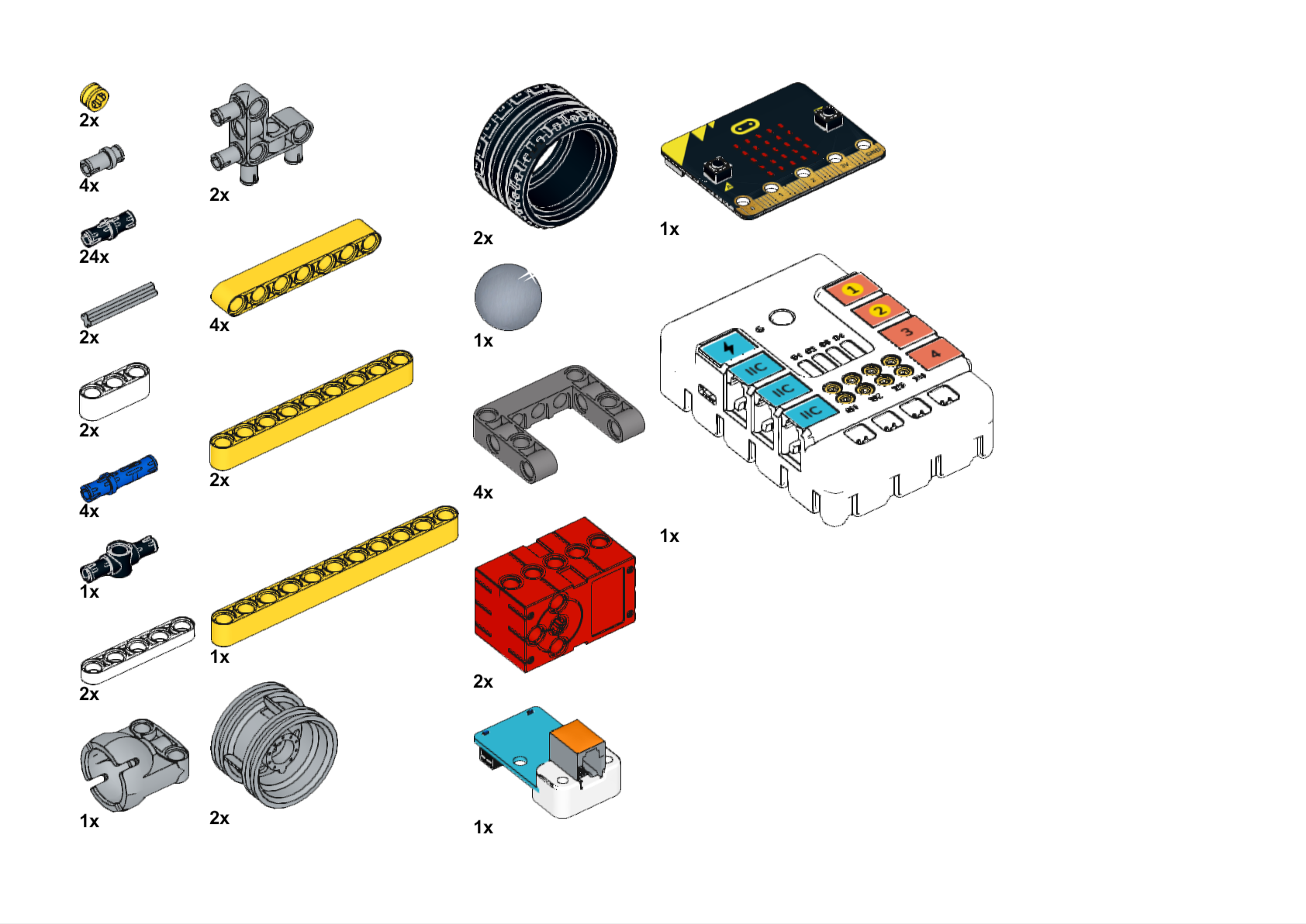
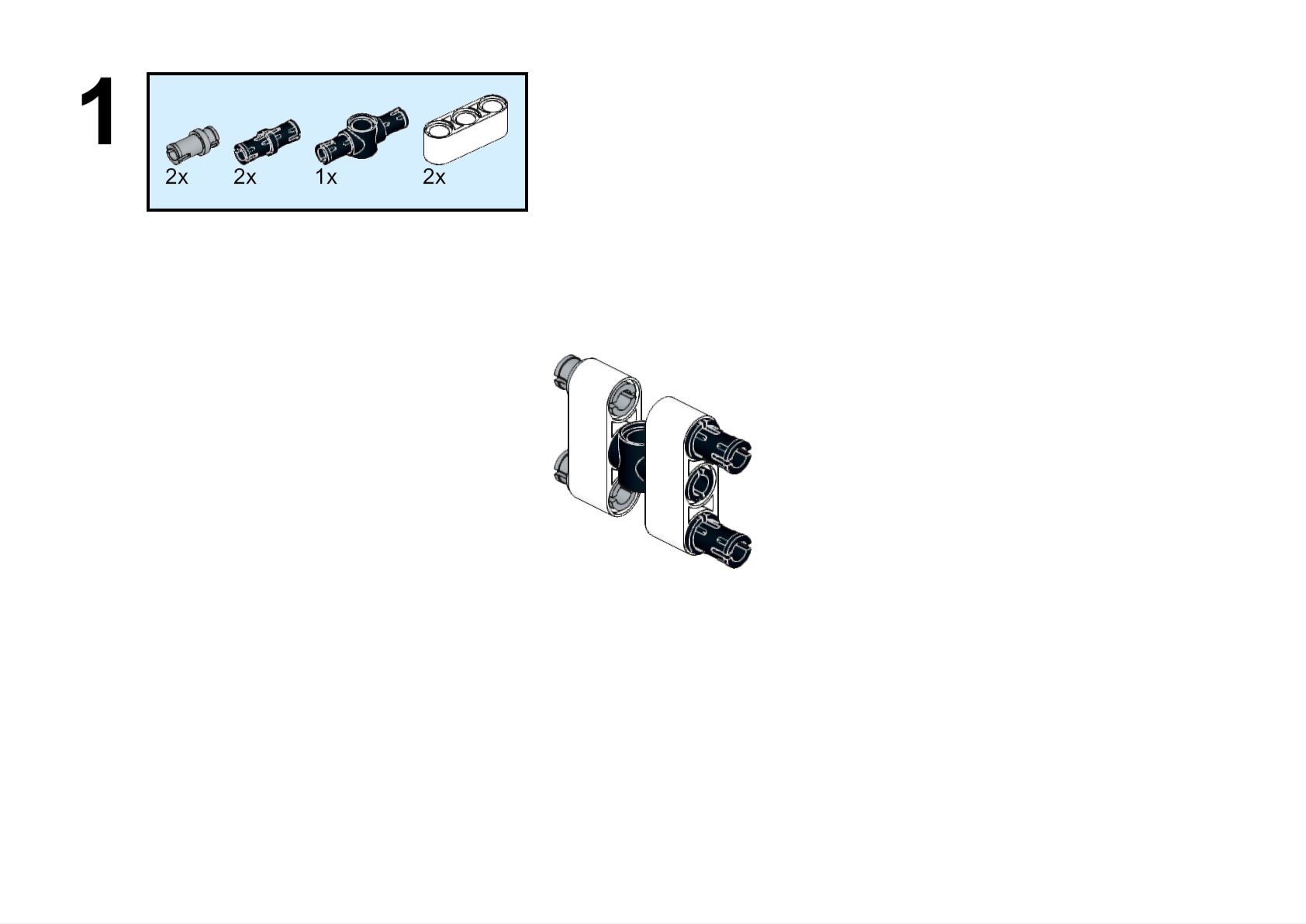
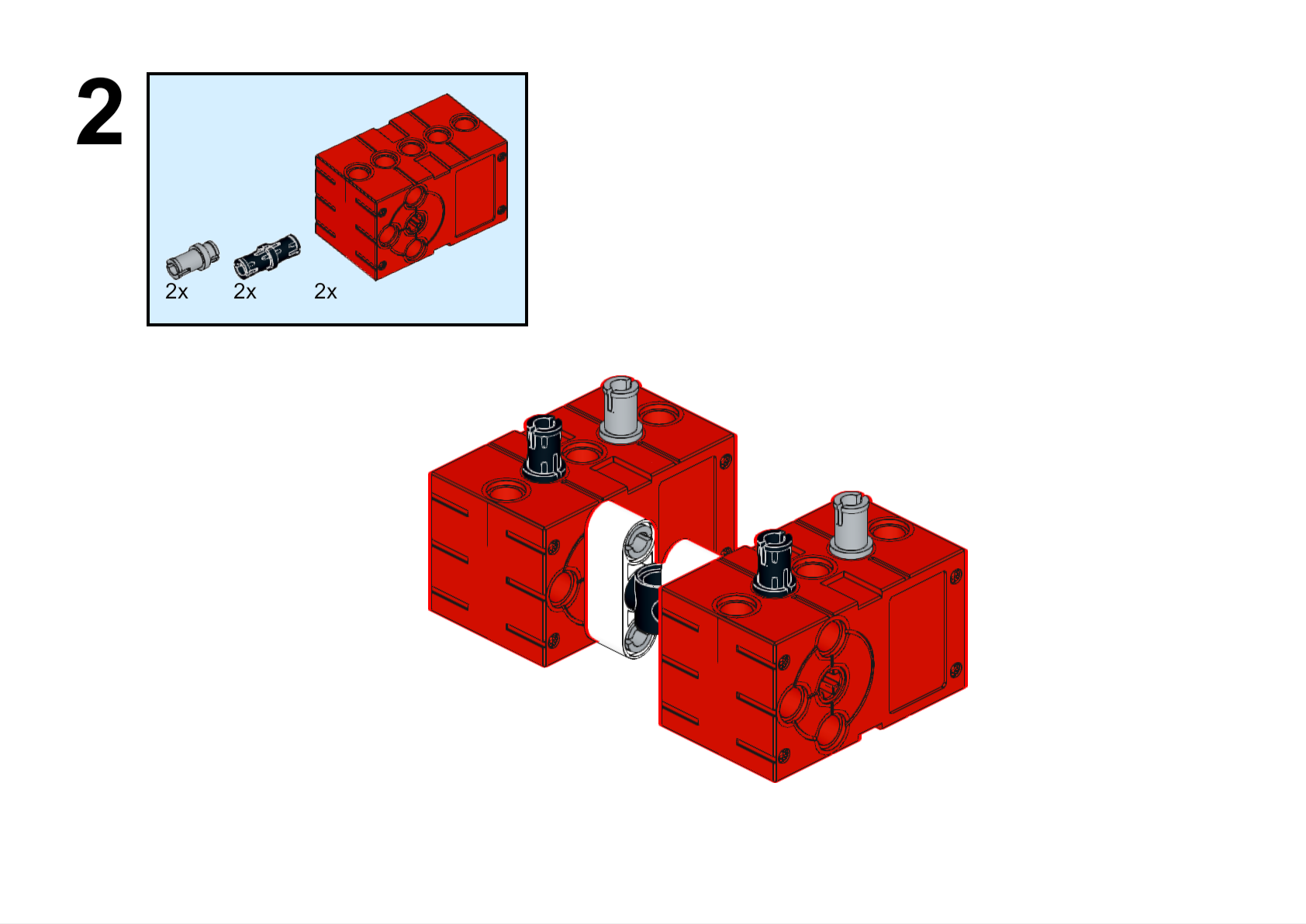
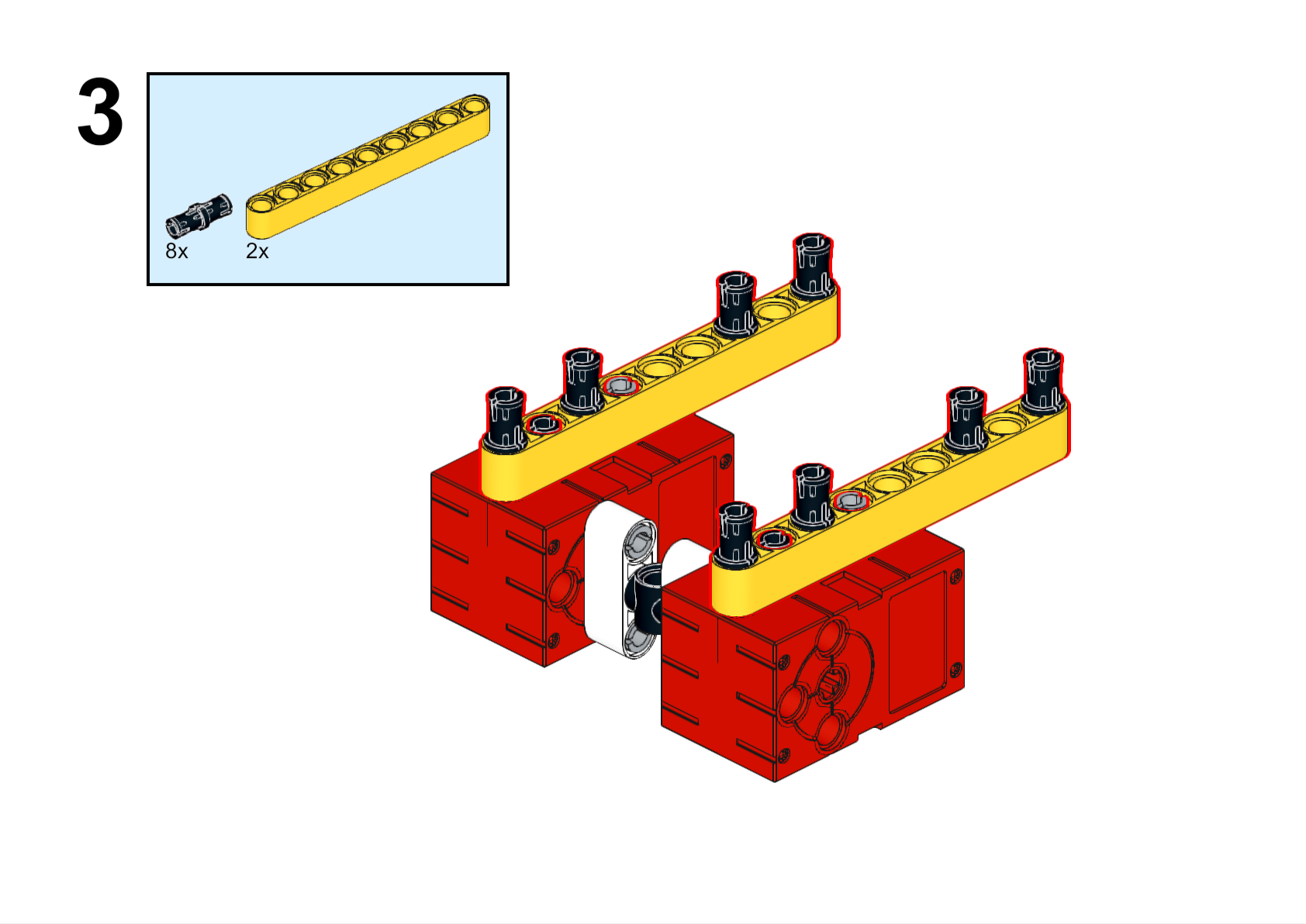
示例
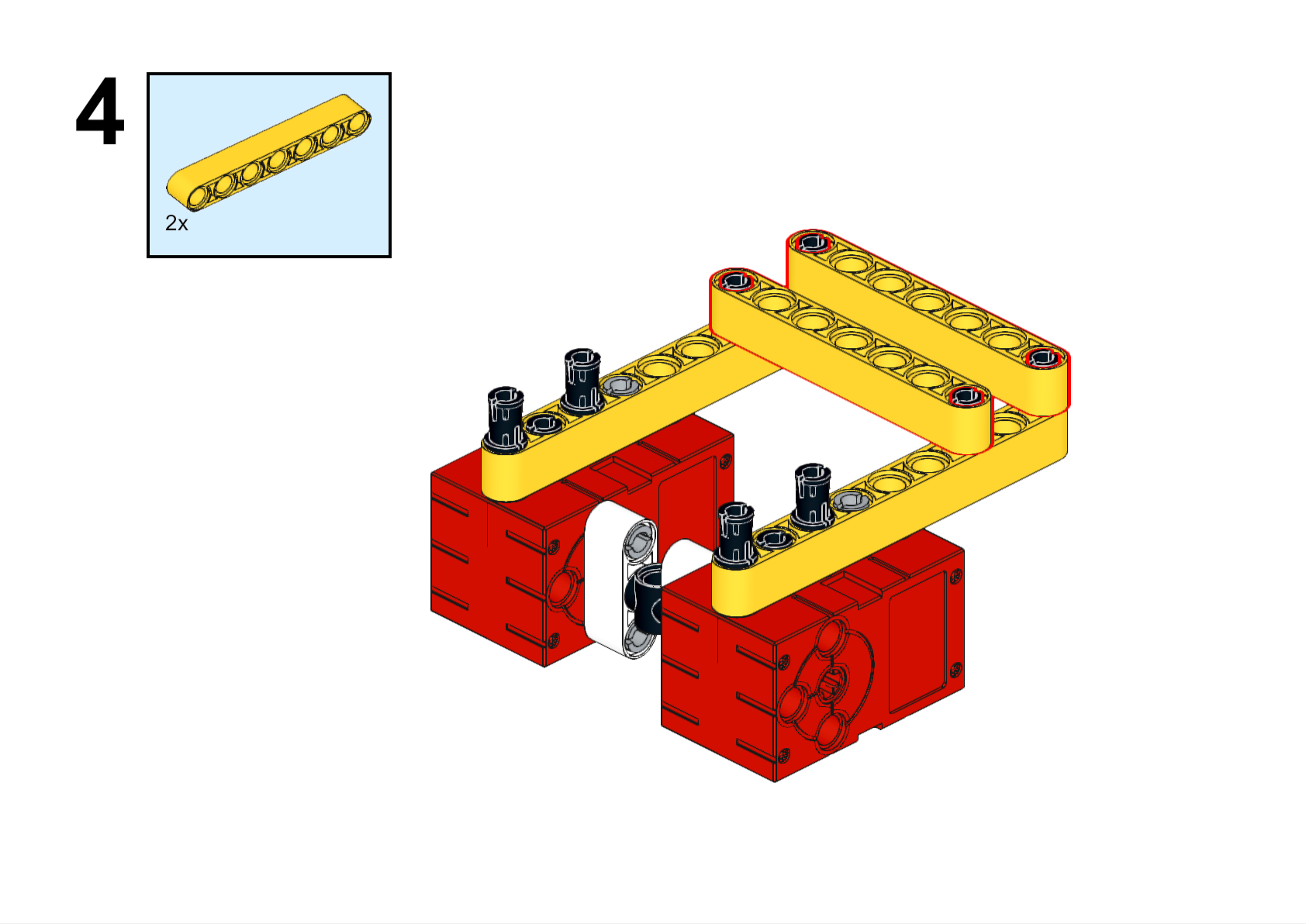
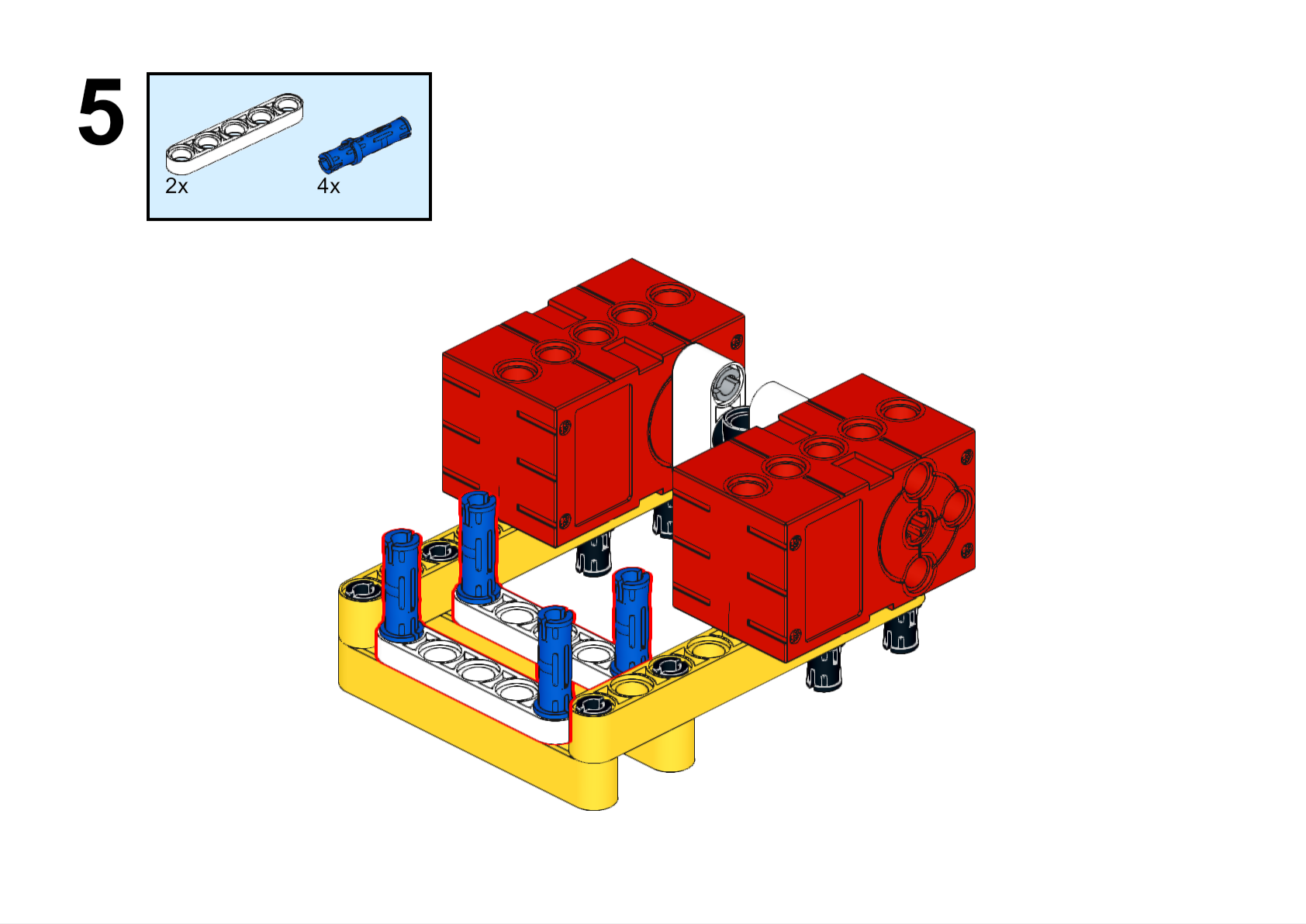
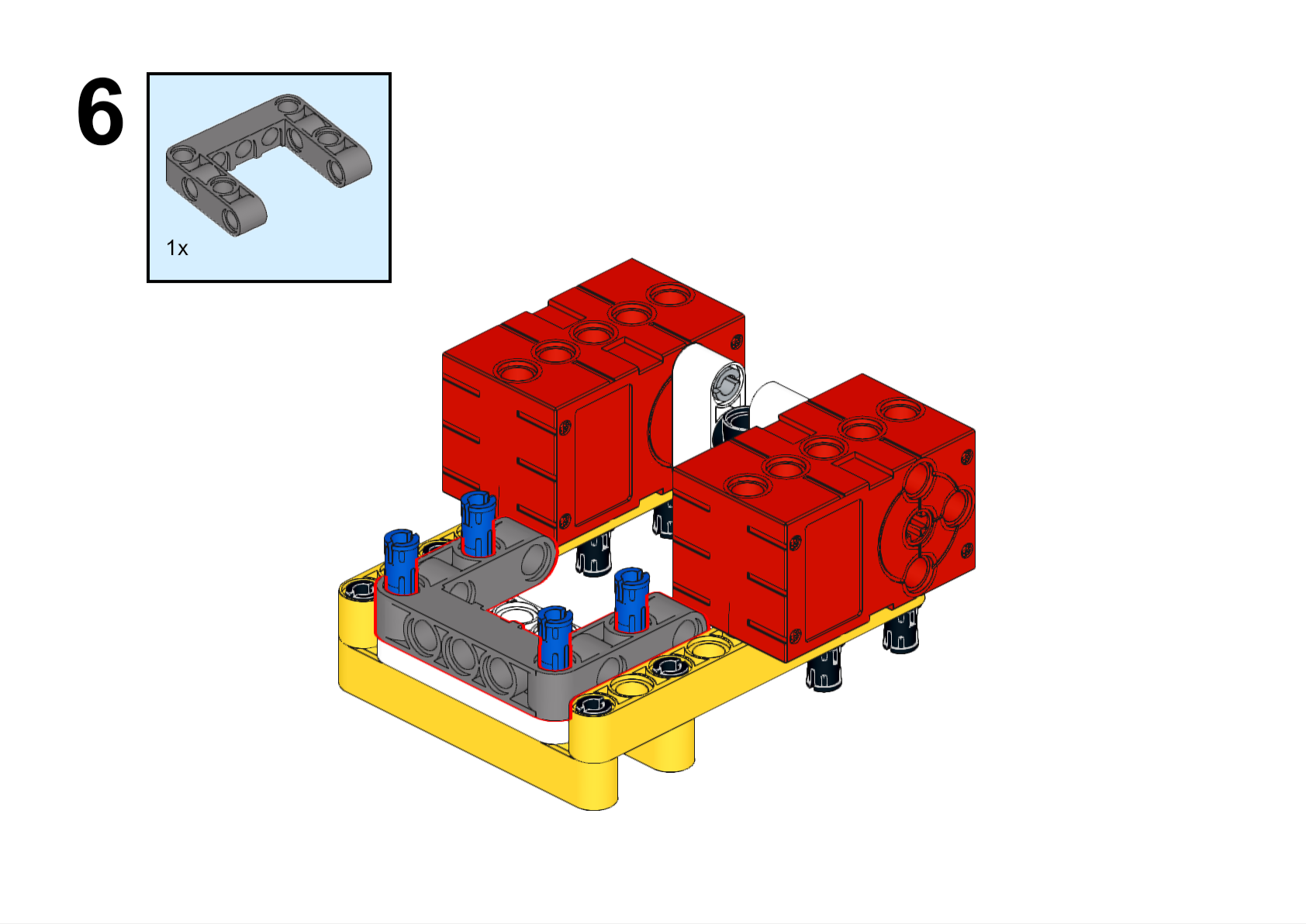
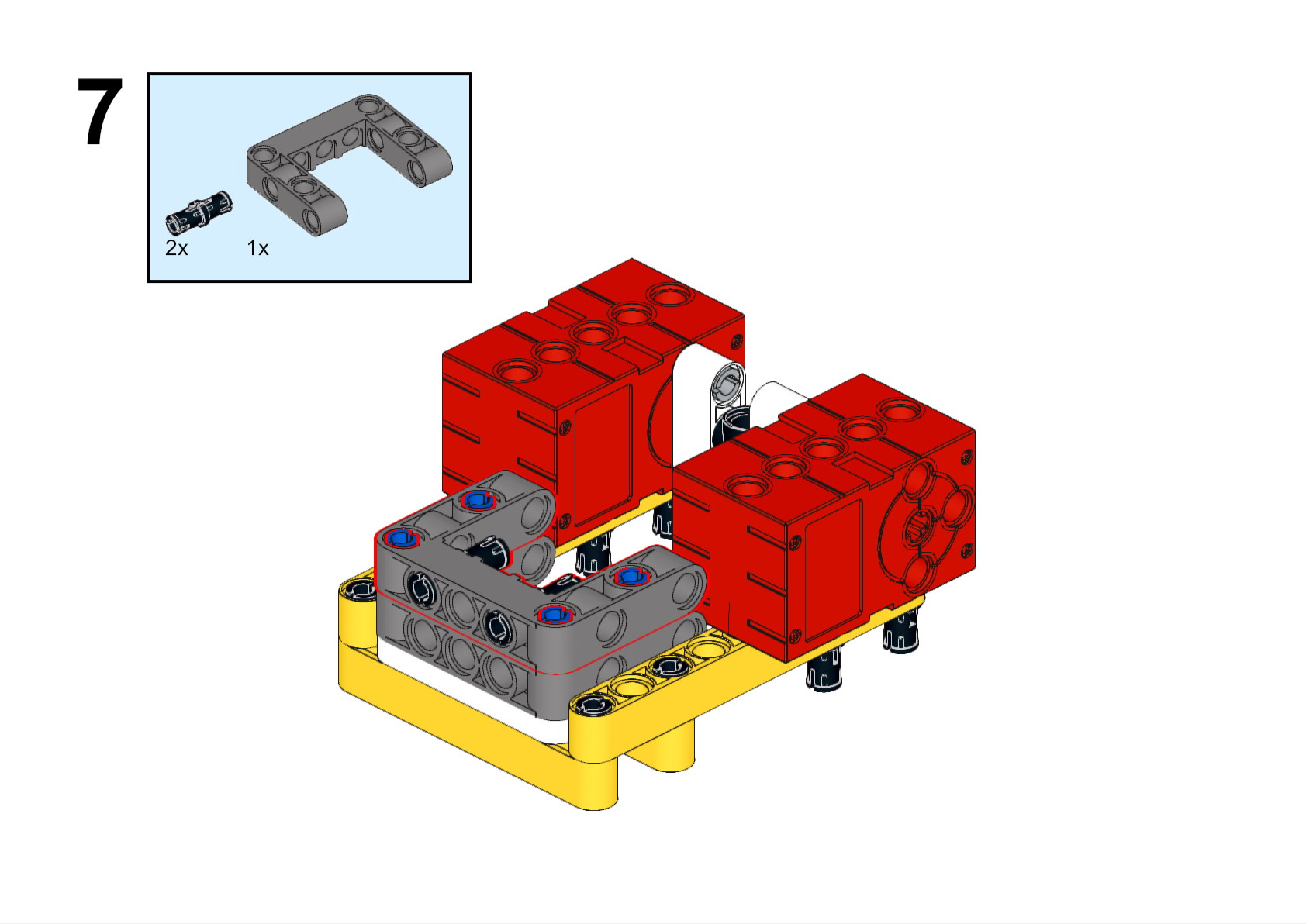
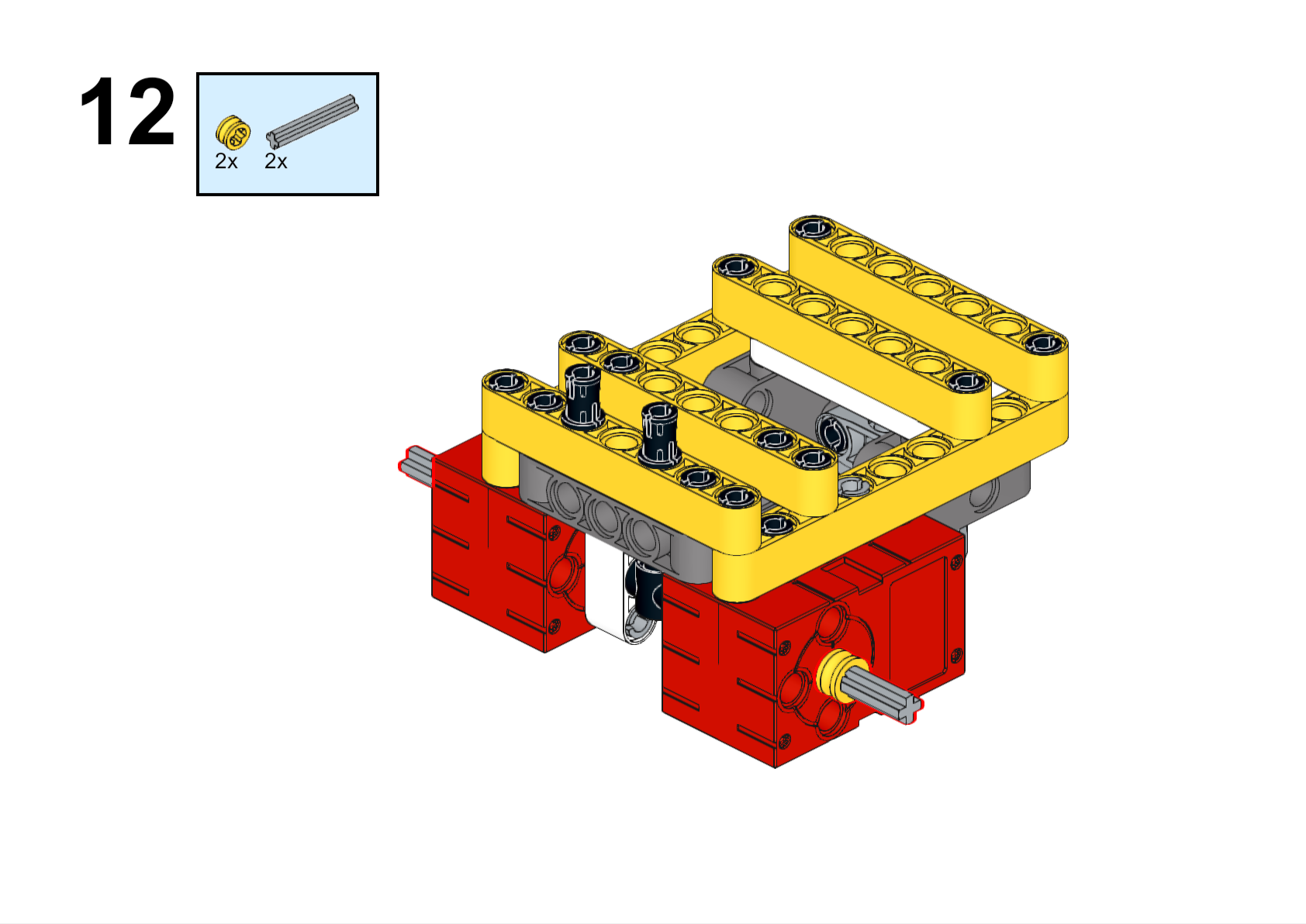
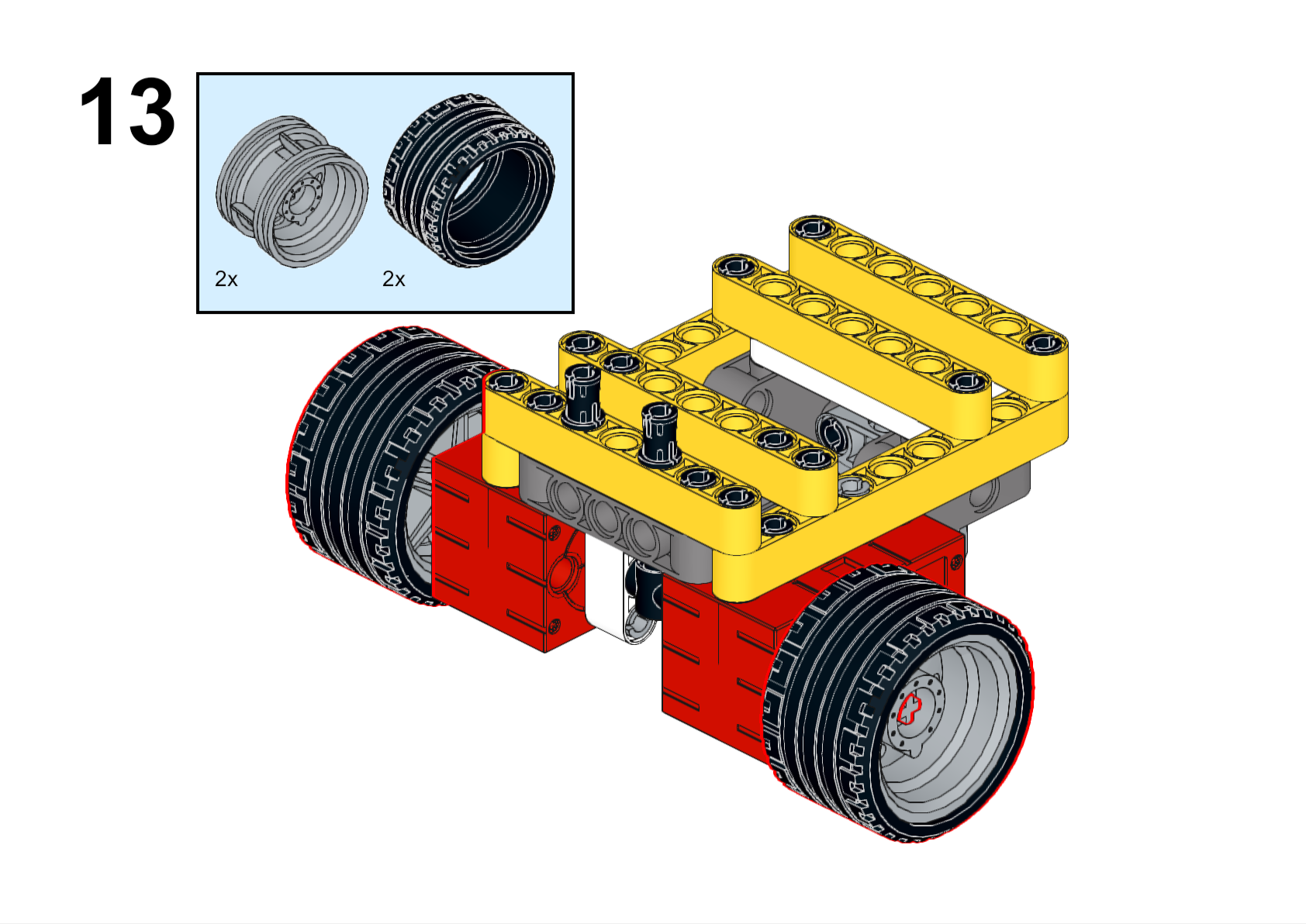
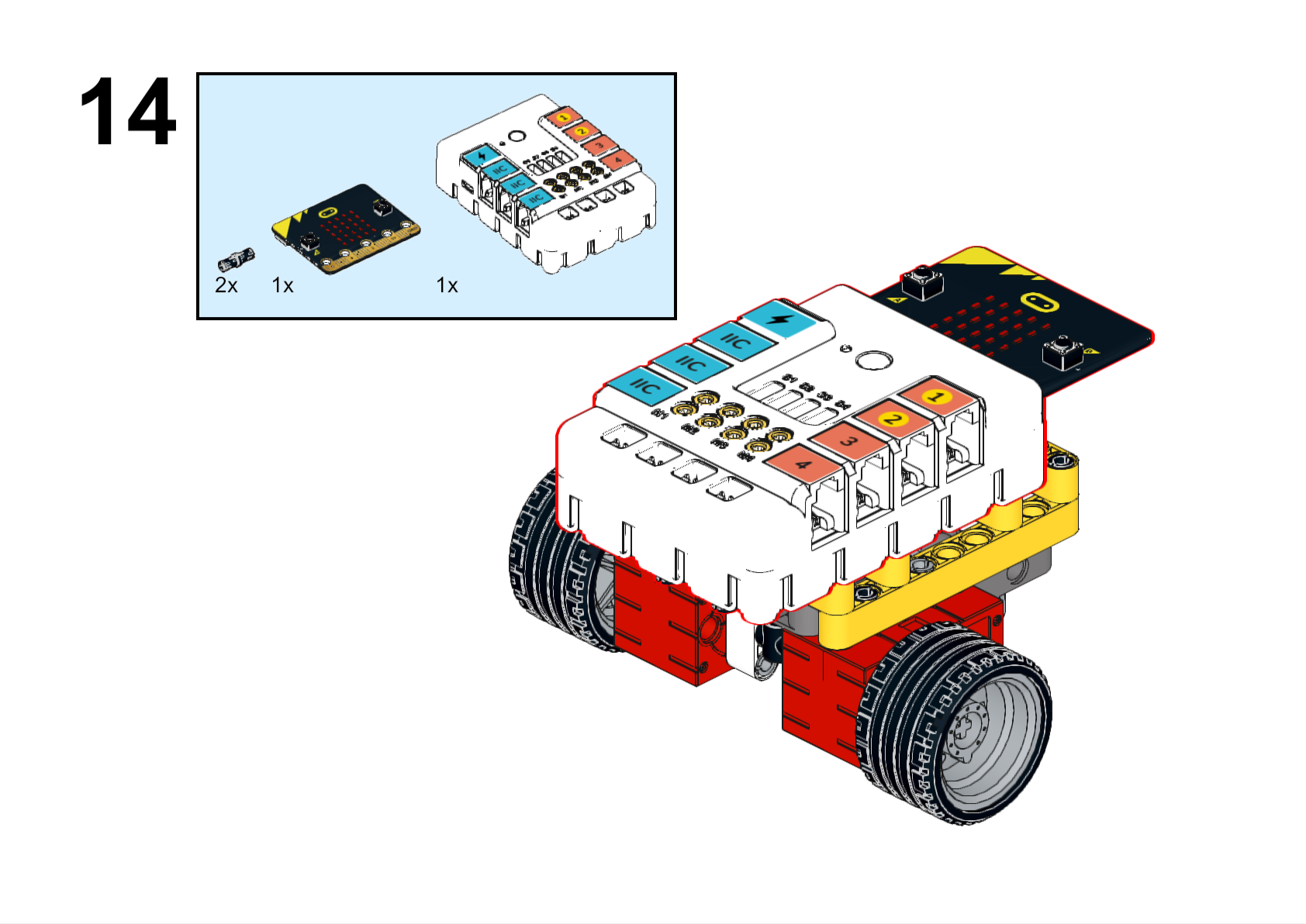
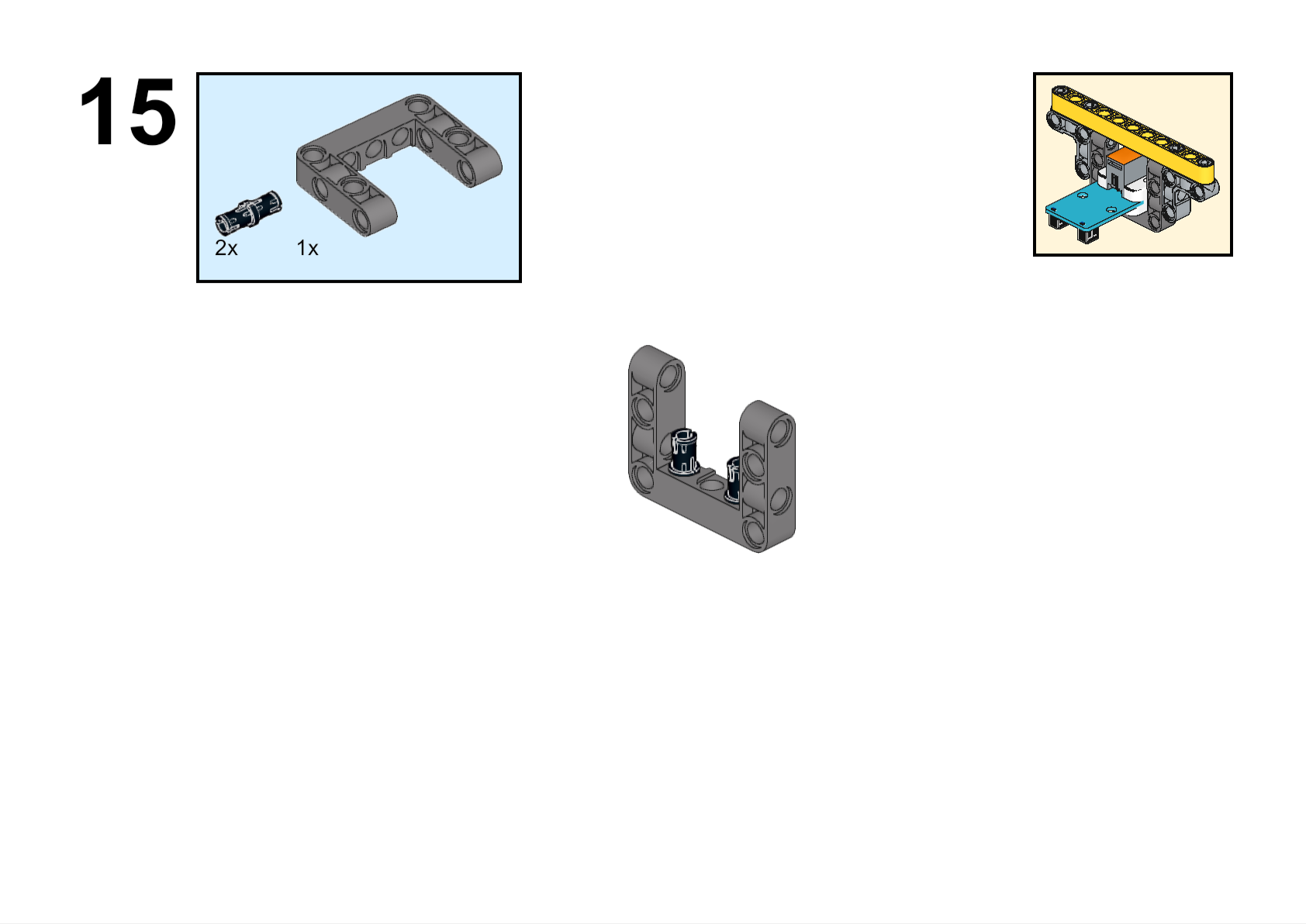
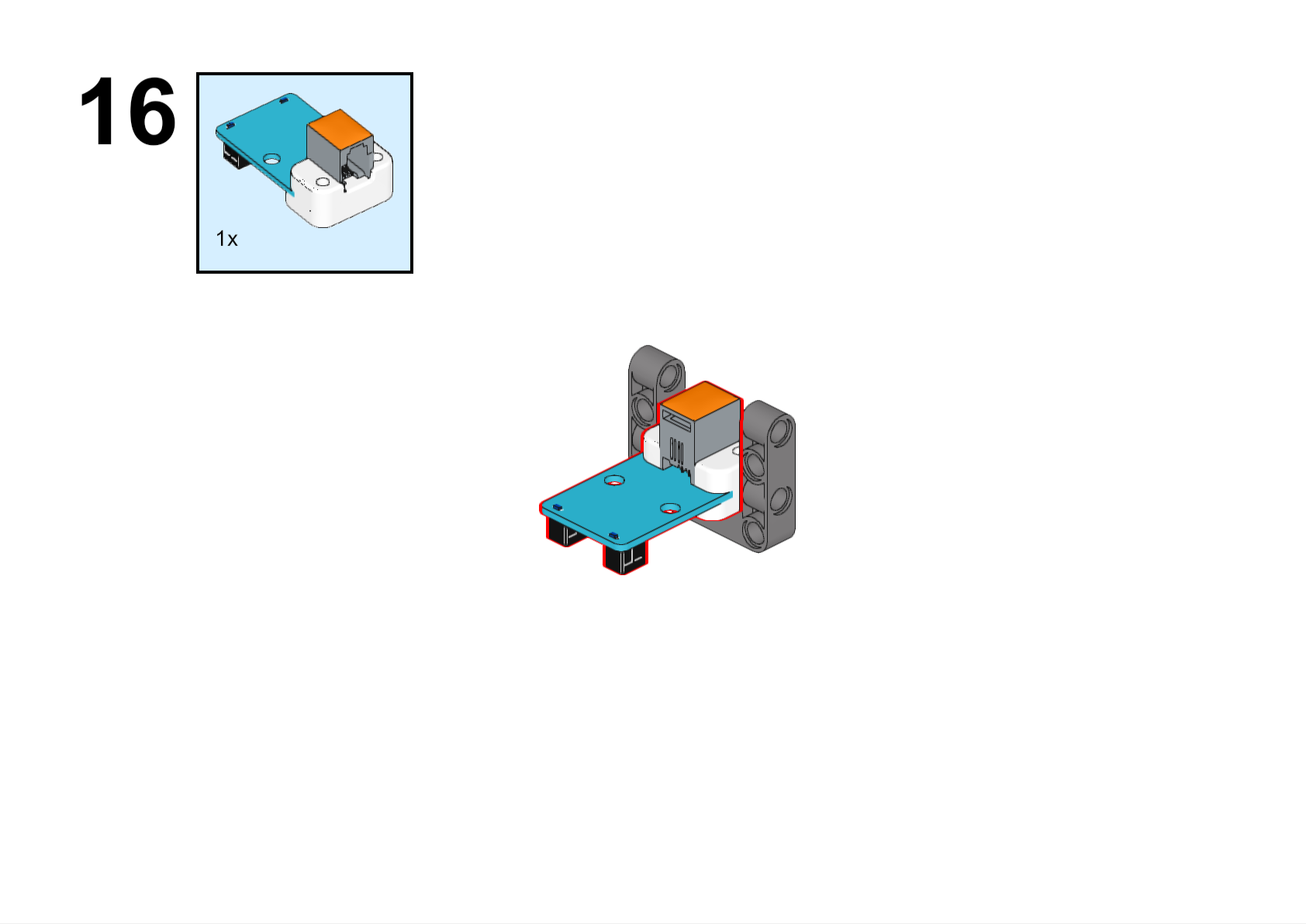
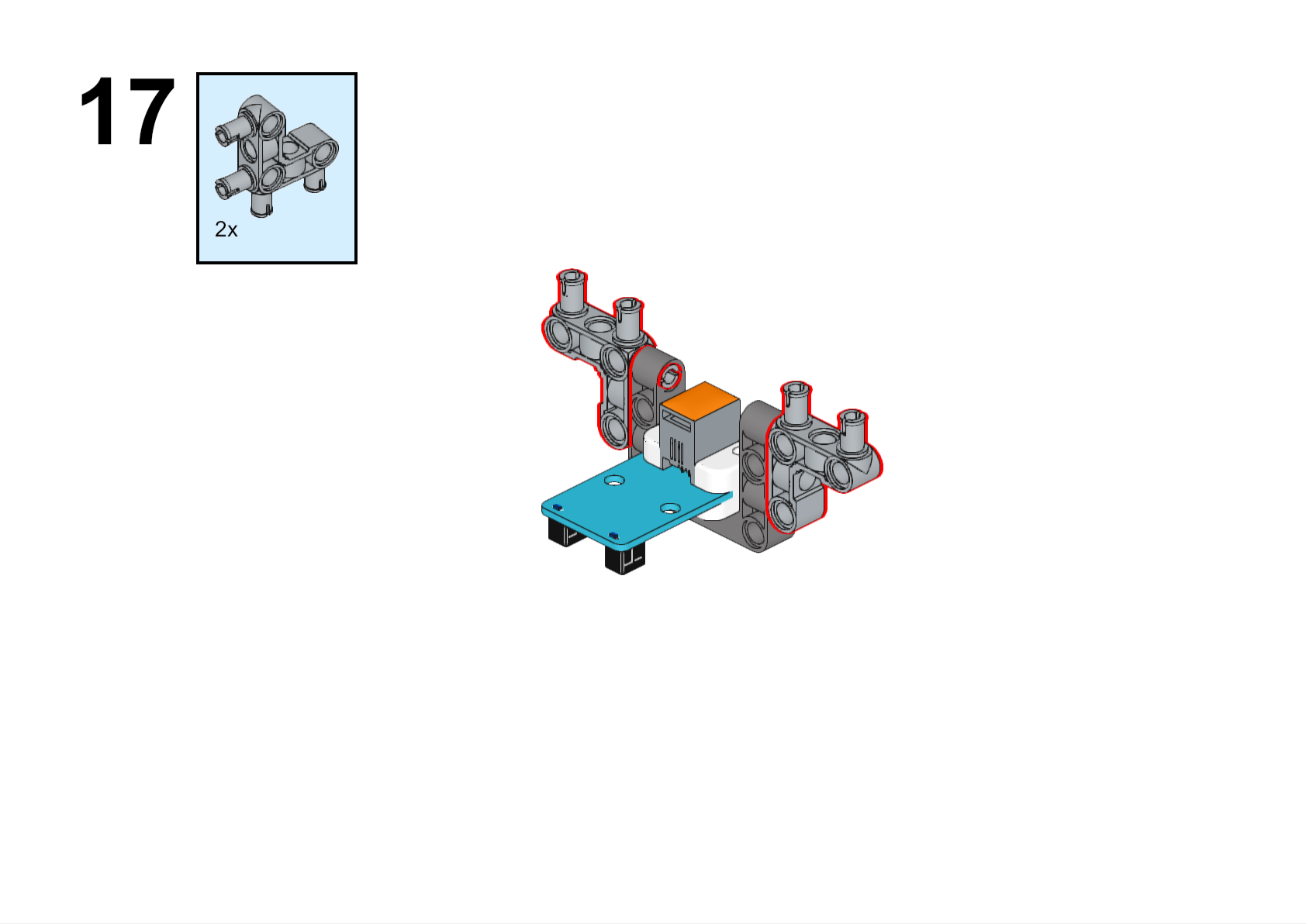
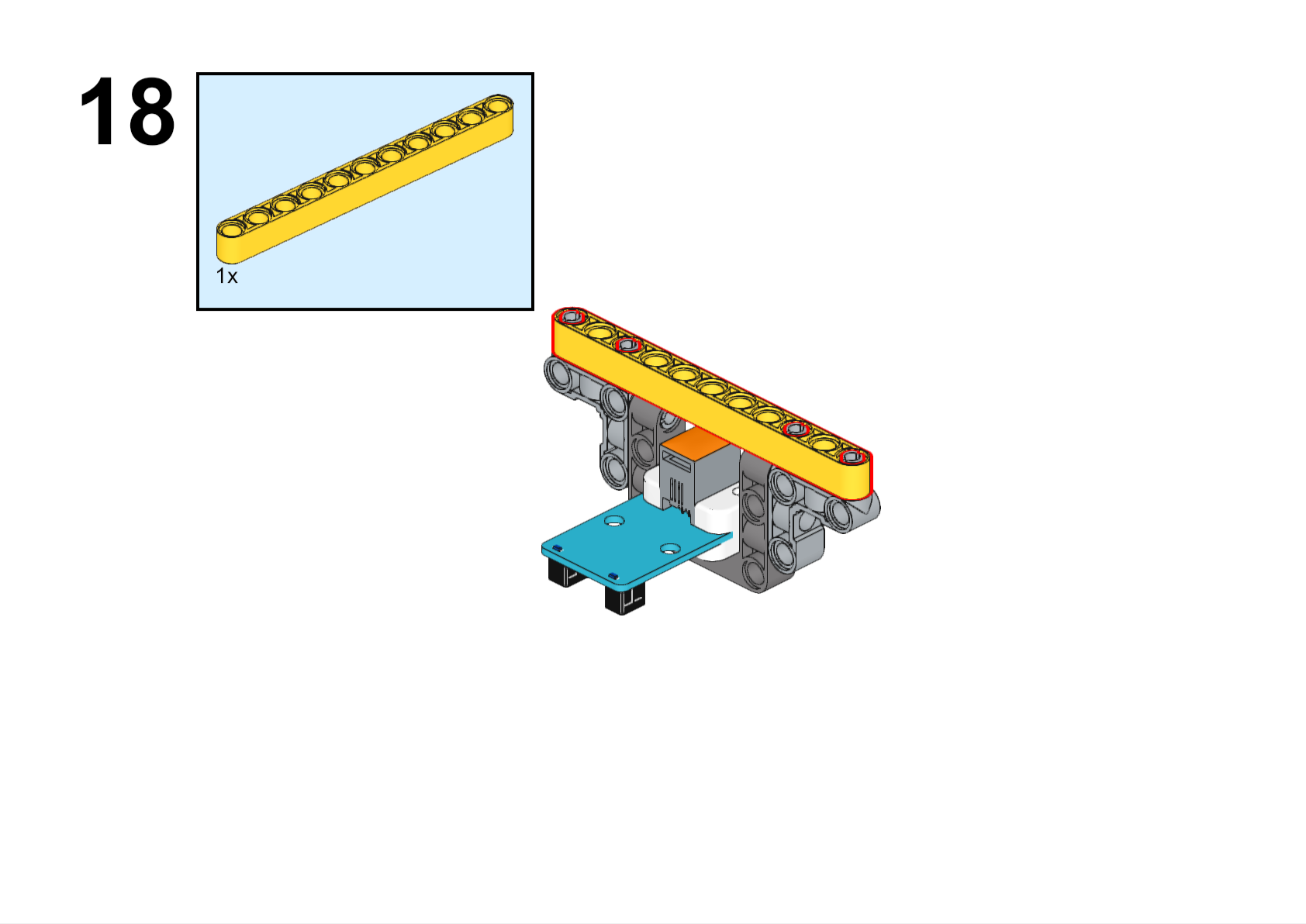
搭建步骤
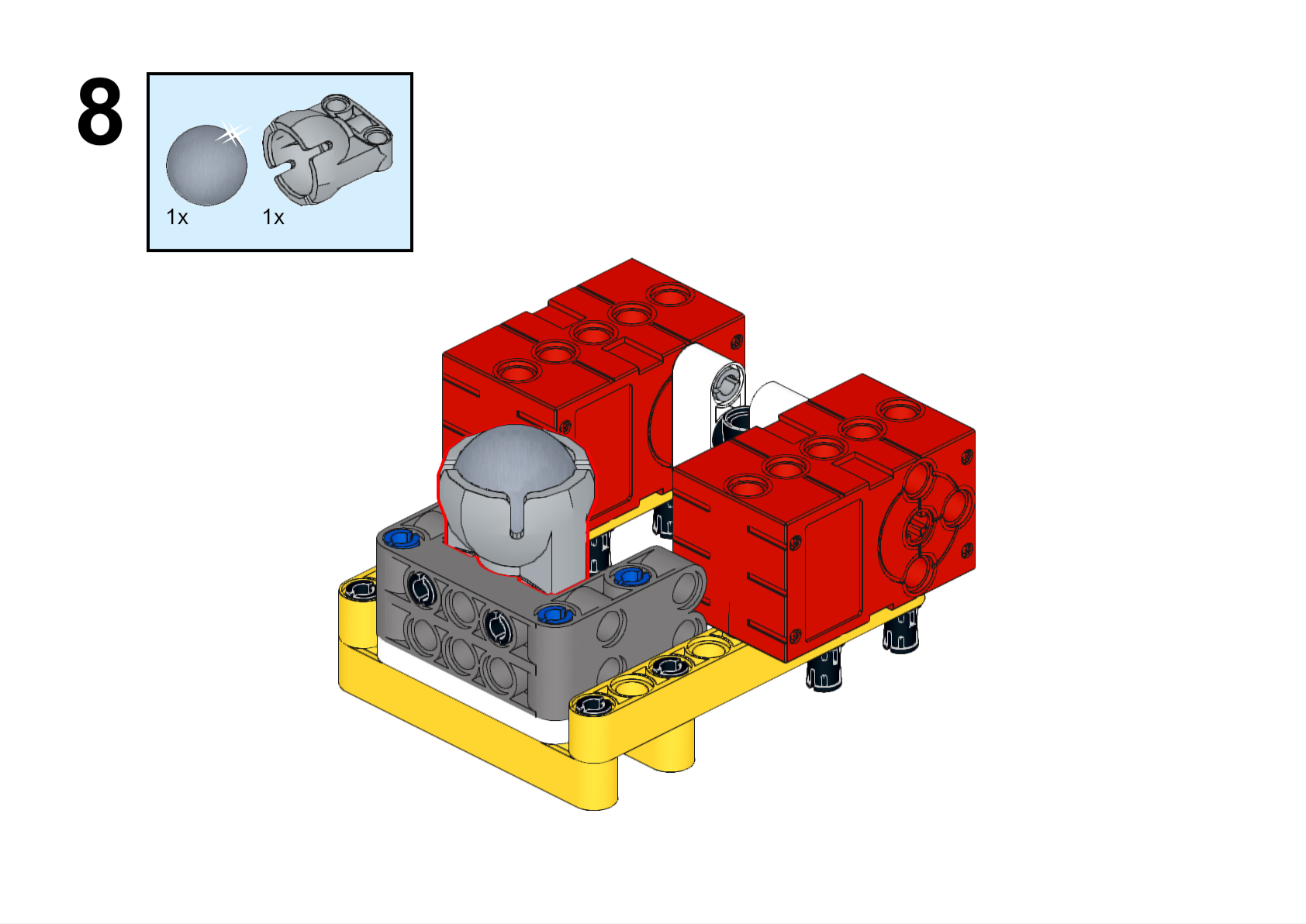
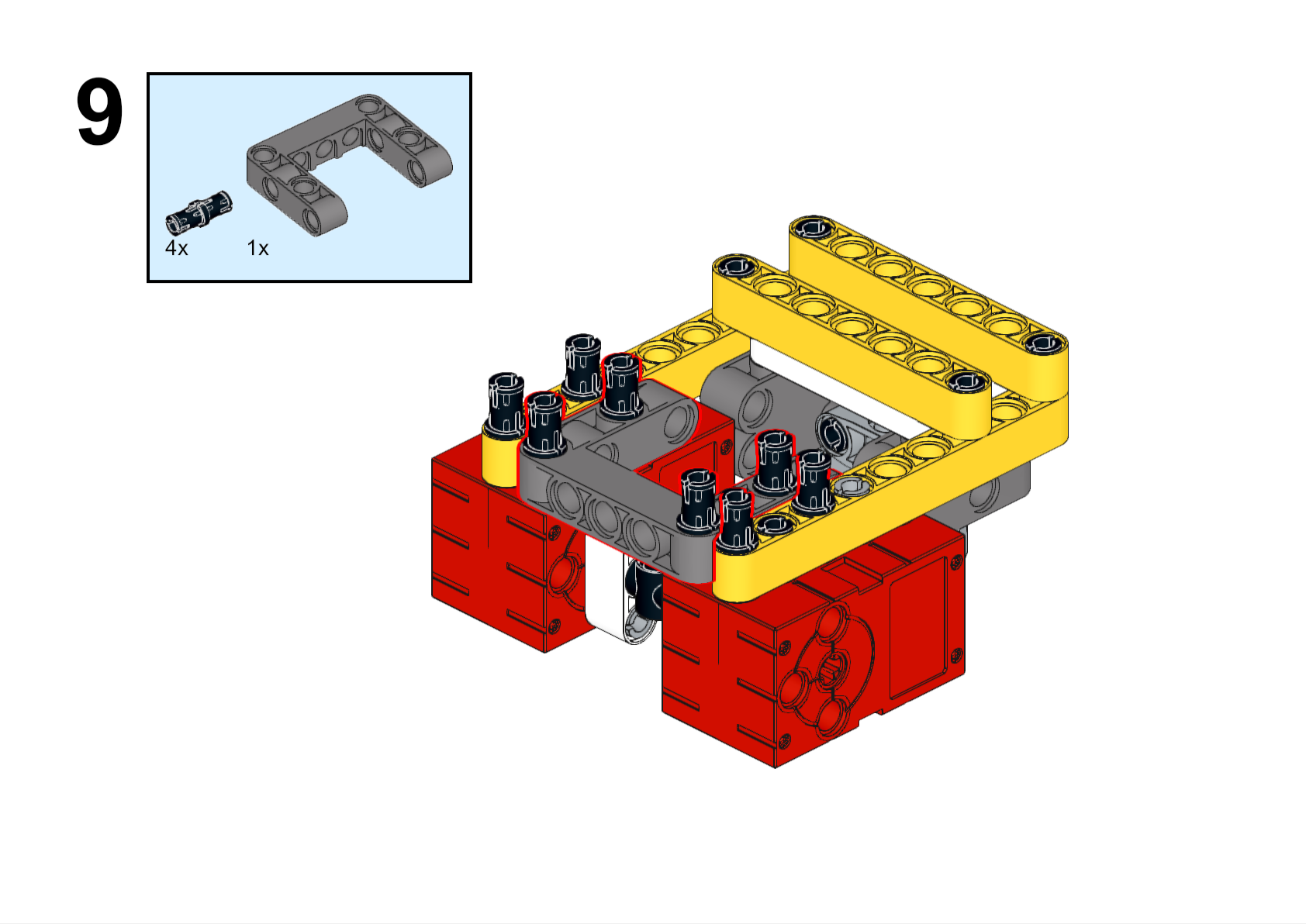
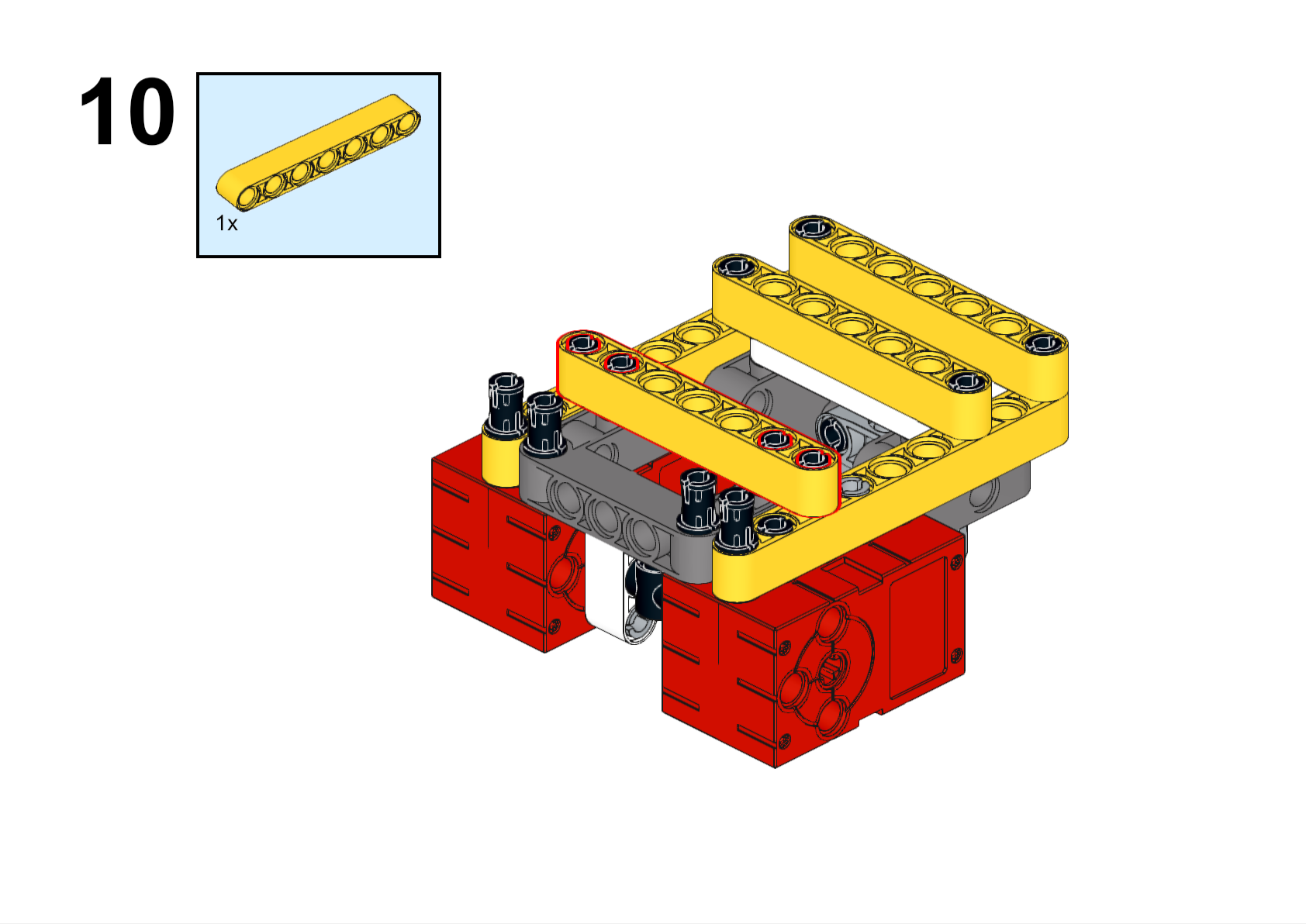
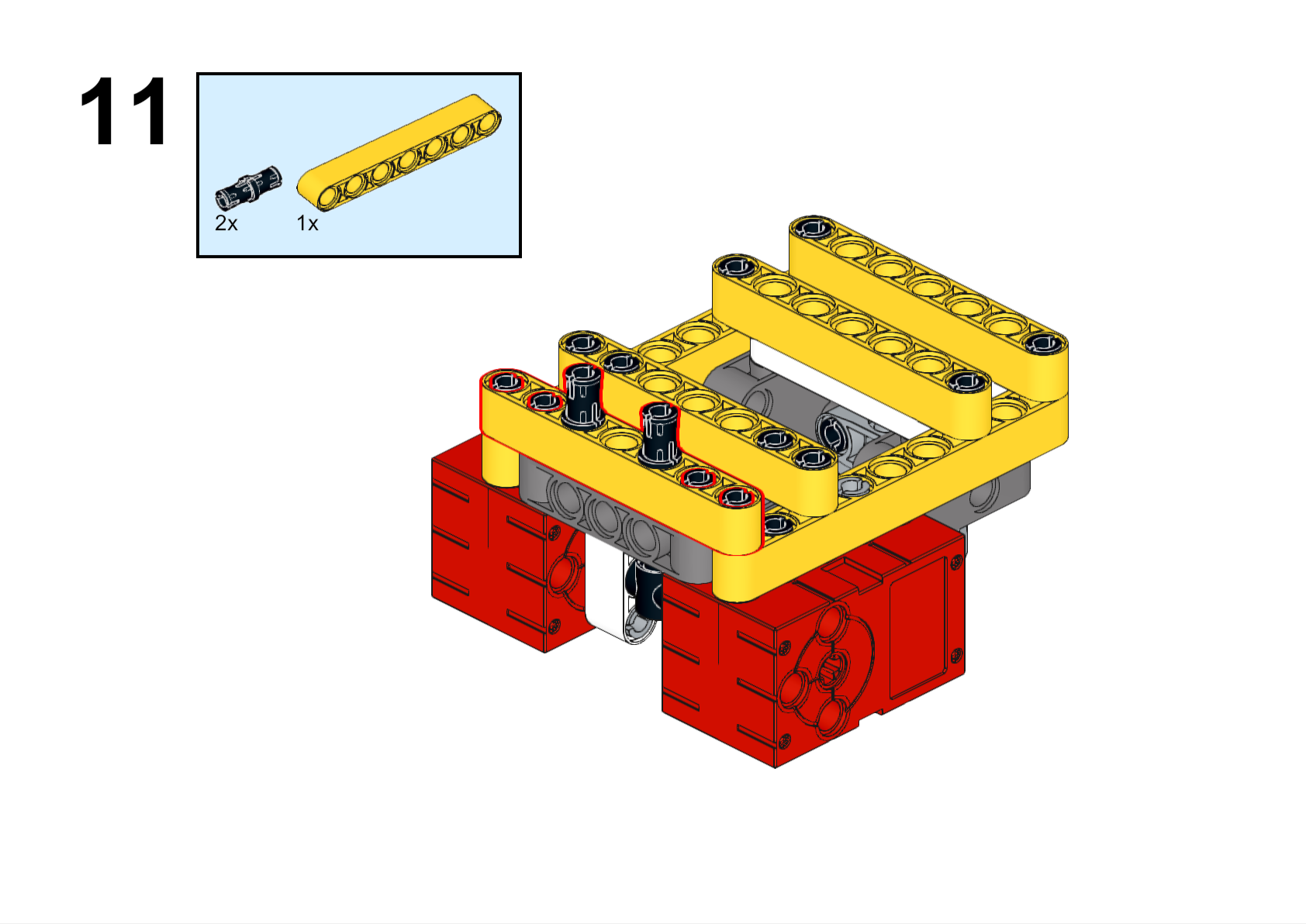
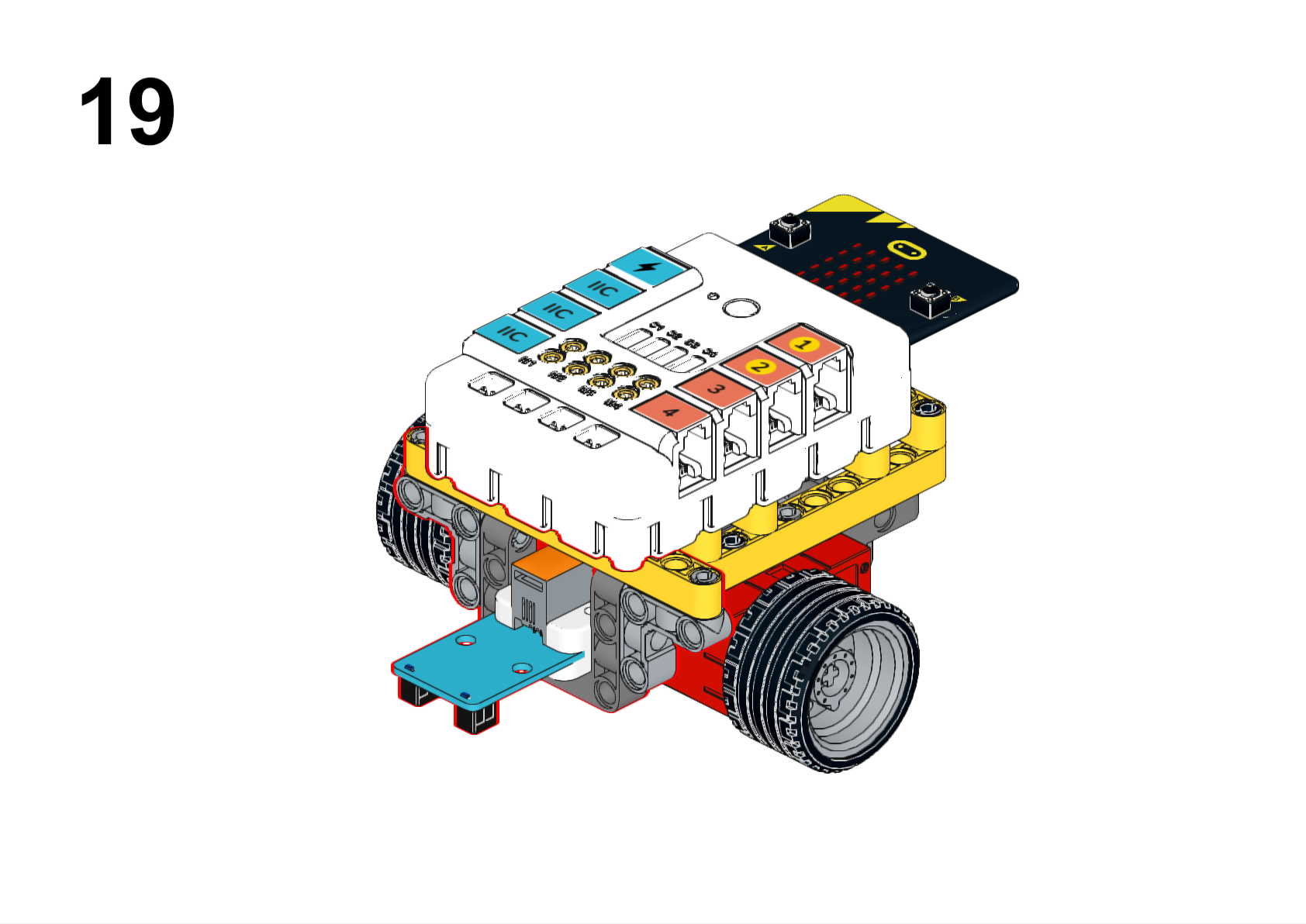
搭建完成
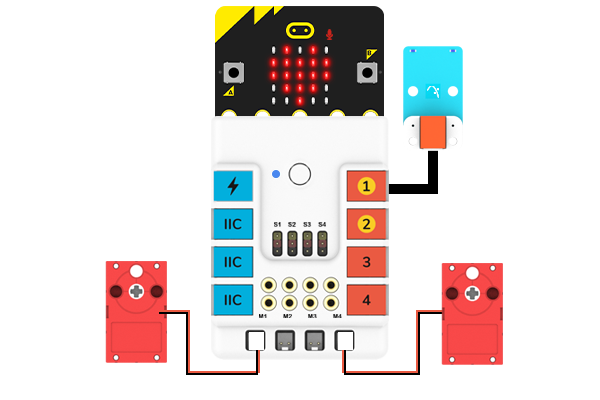
硬件连接
将巡线传感器连接到哪吒扩展板的J1接口,电机连接到哪吒扩展板的M1、M4接口。
软件编程
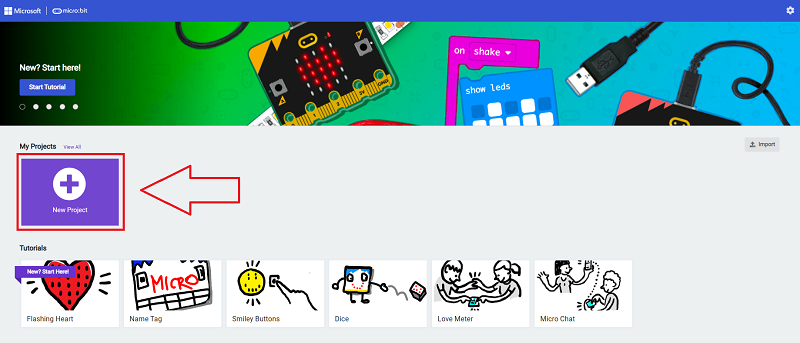
打开编程平台makecode
新建项目
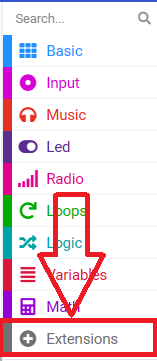
点击扩展
在搜索栏搜索PlanetX添加行星系列传感器的扩展库
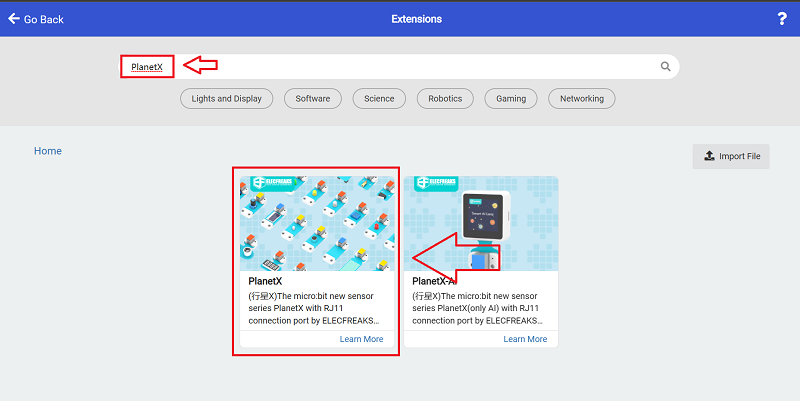
在搜索栏搜索nezha添加哪吒扩展板的扩展库
编写程序
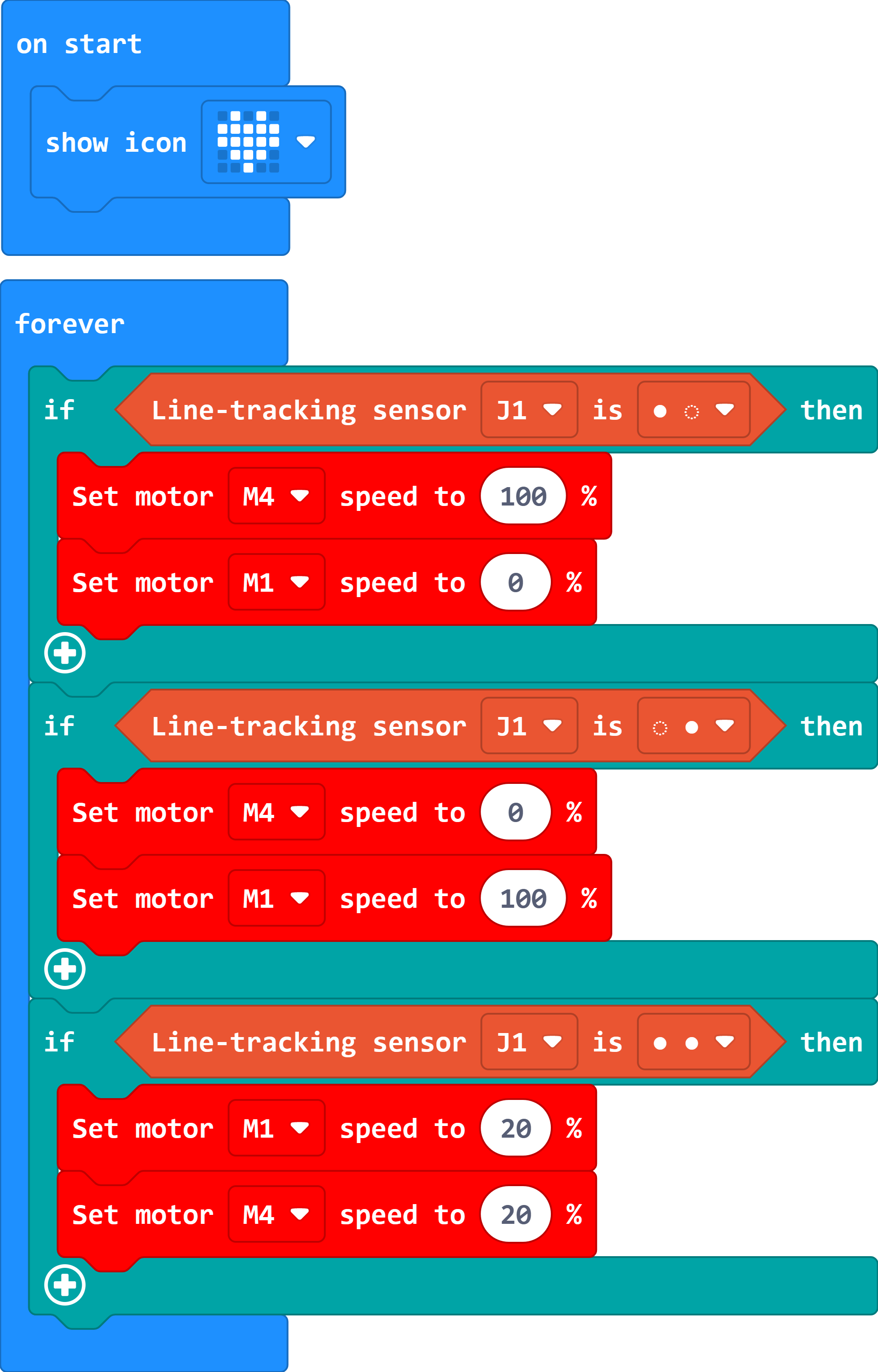
程序链接:https://makecode.microbit.org/_3EV1ULio68sq
你也可以通过以下网页直接下载程序。
展示
分组展示,学生对机器人进行测试、调试和优化,提高巡线的准确性和稳定性,比较各组的成果和效果。
示例案例效果
小车沿着黑线行驶。
反思
分组分享,让每组的学生分享自己的制作过程和心得,总结自己遇到的问题和解决办法,评价自己的优点和不足。