Case 26 智能避障小车2
简介
在这个课程中,我们将一起制作一辆智能避障车,利用哪吒发明家套装V2、超声波传感器以及舵机控制转向的技术。我们将学习超声波传感器的工作原理,了解它如何帮助机器人感知周围的环境,同时探索汽车前桥结构的知识点,以实现车辆的转向功能。通过这个项目,我们将培养创造力、问题解决和团队合作的能力,同时了解机器人技术的应用和机械结构的原理。

教学目标
- 了解超声波传感器的工作原理及其在机器人中的应用。
- 理解舵机的工作原理和转向控制的原理。
- 掌握使用哪吒发明家套装V2搭建机器人的基本方法和技巧。
- 学习编写程序,使机器人能够根据超声波传感器的数据进行避障并实现转向功能。
- 培养创造力、问题解决和团队合作的能力。
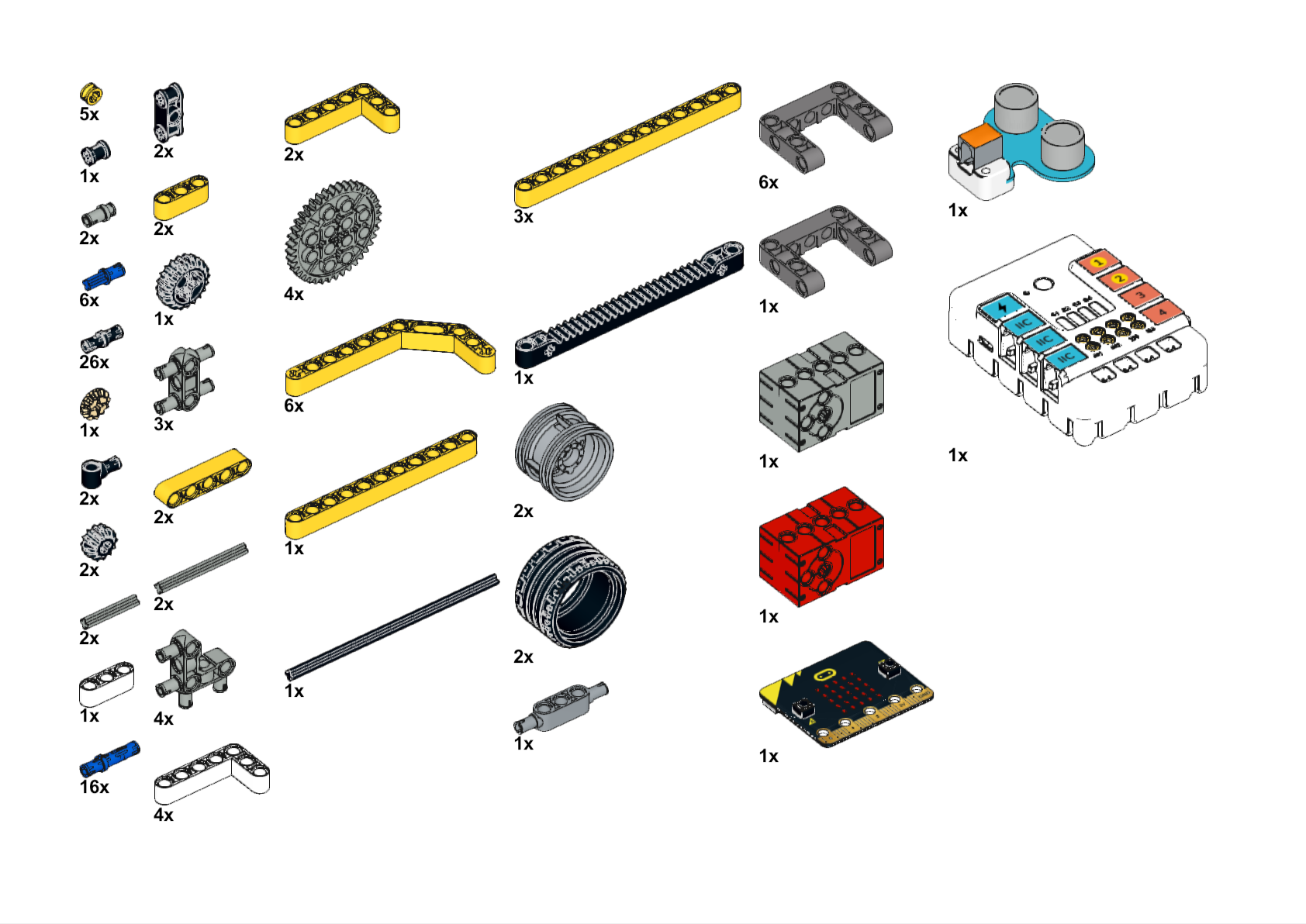
教学准备
教学过程
引入
向学生介绍智能避障车制作的背景和目标,激发学生的兴趣和好奇心。
大家是否经常遇到需要转弯的情况,比如驾驶汽车时需要控制方向盘进行转向?今天,我们将探索一种有趣的技术,即使用舵机控制转向的智能避障车。这辆车将能够自动检测前方的障碍物,并通过舵机控制前轮的转向来避开障碍物。我们将使用超声波传感器来感知前方的距离,以及舵机来控制车辆的转向。
在这个项目中,我们将学习超声波传感器的工作原理,了解它如何发射超声波并测量回波时间来计算距离。我们还将学习汽车前桥结构的知识点,理解转向的原理和舵机的工作方式。通过将这些知识点应用到实际项目中,我们将能够制作一辆智能避障车,并通过编写程序实现其自动避障和转向的功能。
让我们一起来探索超声波传感器的工作原理和汽车前桥结构,发挥创造力,解决问题,并体验制作智能机器人的乐趣吧!准备好了吗?让我们开始吧!tan
探究
分组讨论,让学生思考如何用积木材料来制作一辆智能避障车。
- 超声波传感器是如何工作的?它如何测量距离?
- 舵机是什么?它是如何工作的?如何利用舵机控制车辆的转向?
- 汽车前桥结构是什么?它在车辆转向中起着什么作用?
- 如何将超声波传感器与哪吒发明家套装V2结合起来,使机器人能够检测前方的障碍物?
- 如何编写程序,使机器人能够根据超声波传感器的数据做出相应的动作,避开障碍物?
实践
分组动手,按照自己的设计方案,用积木材料来制作一辆智能避障车。
按照自己的设计方案,用积木材料来制作一辆智能避障车。
示例
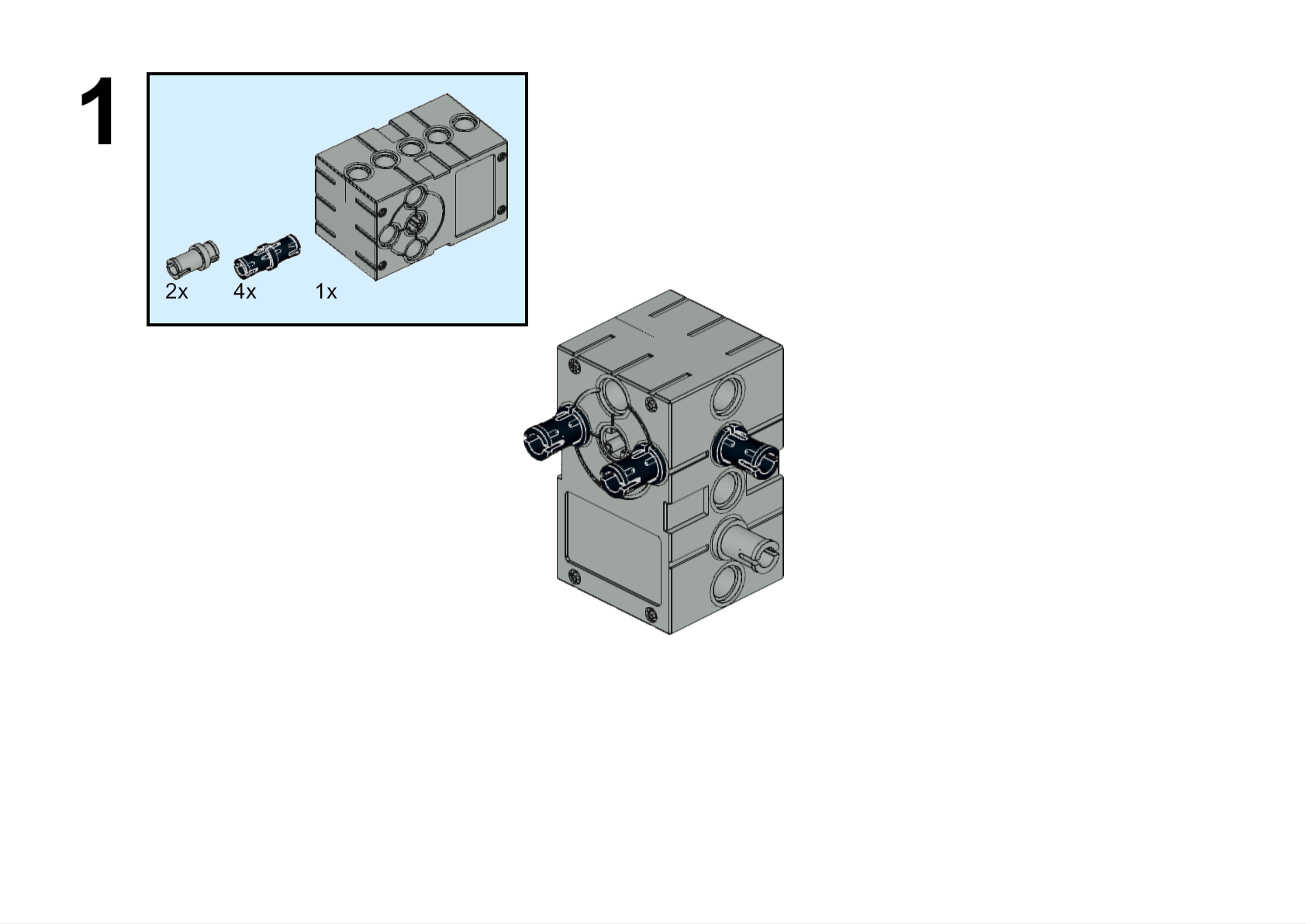
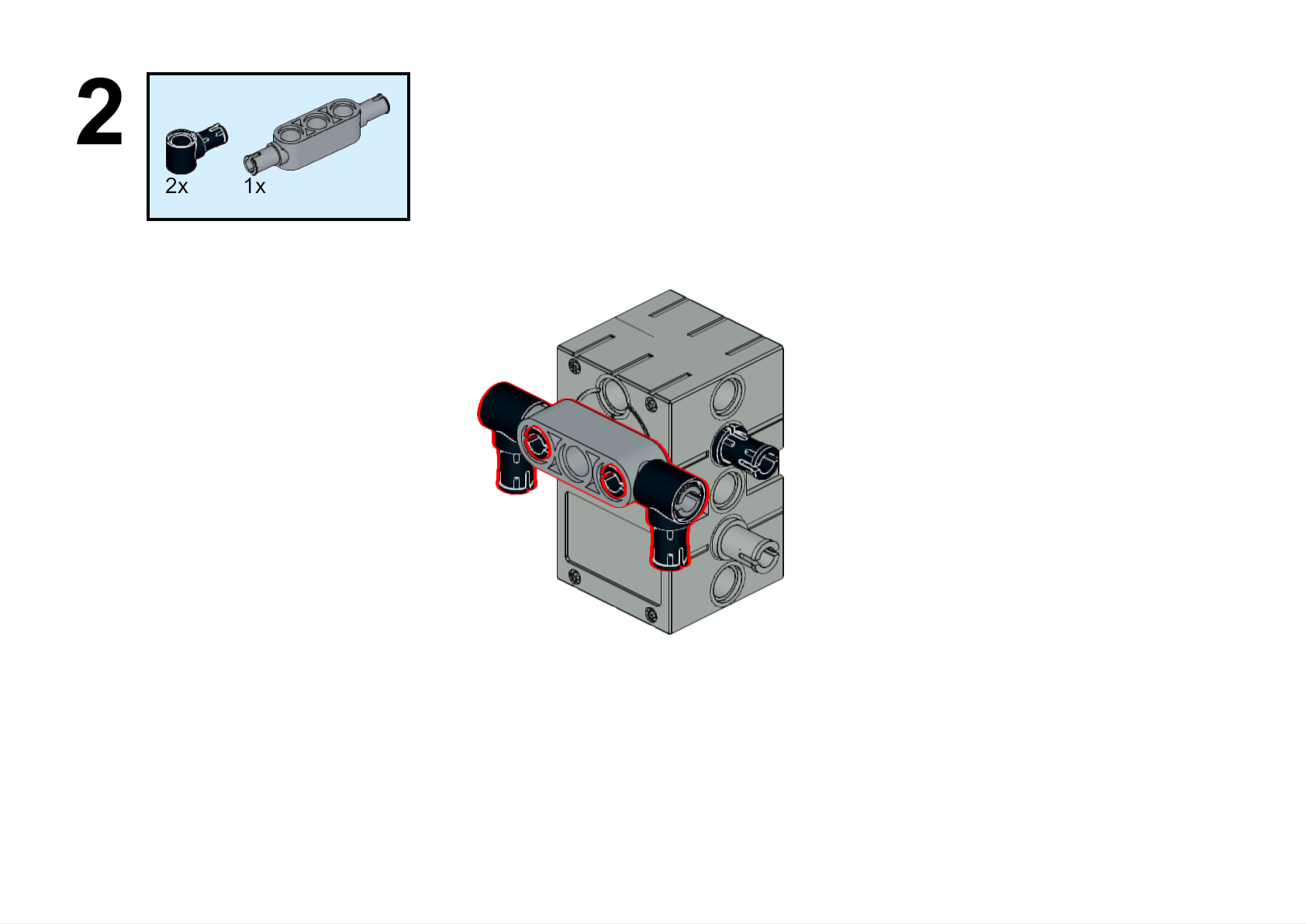
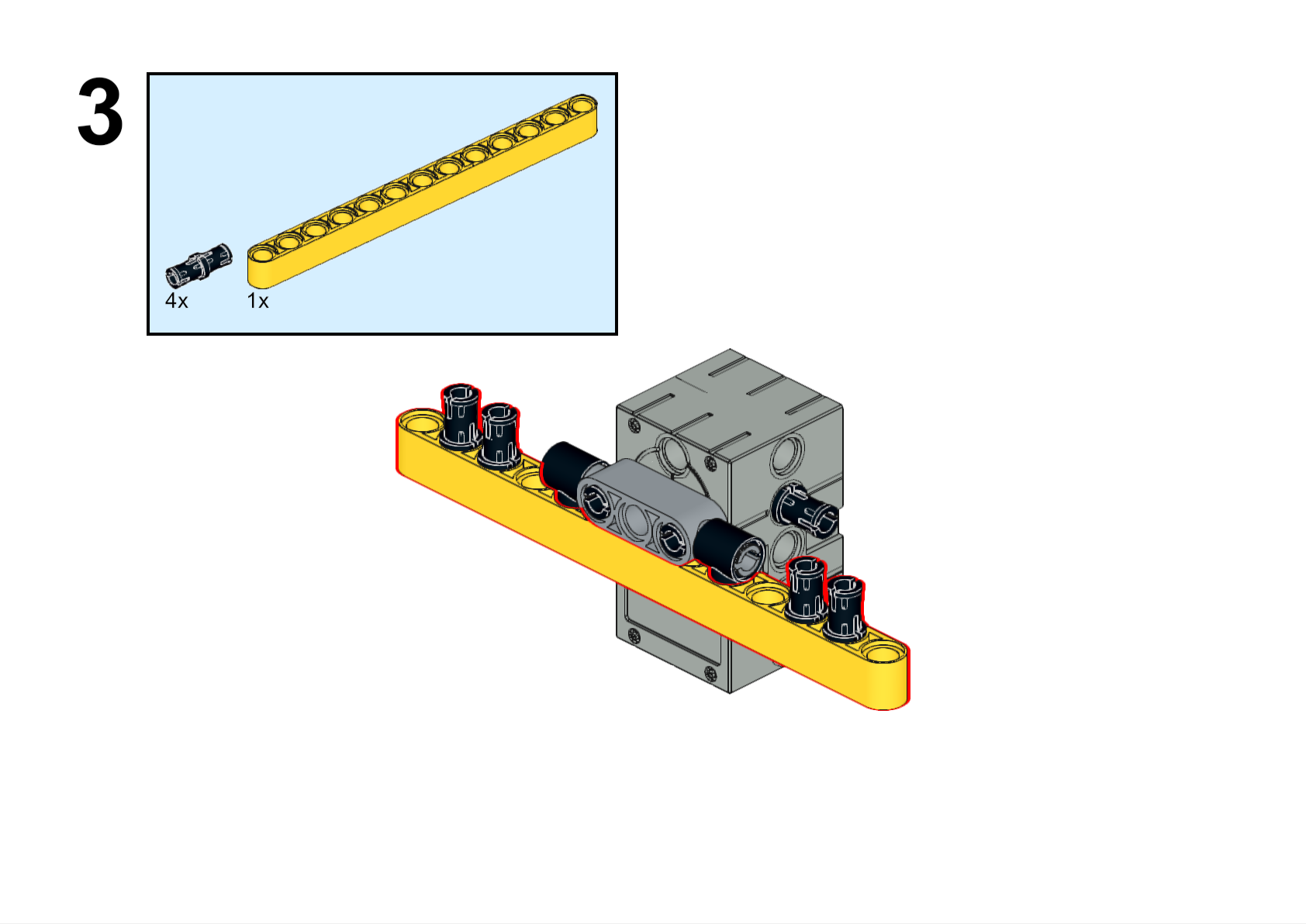
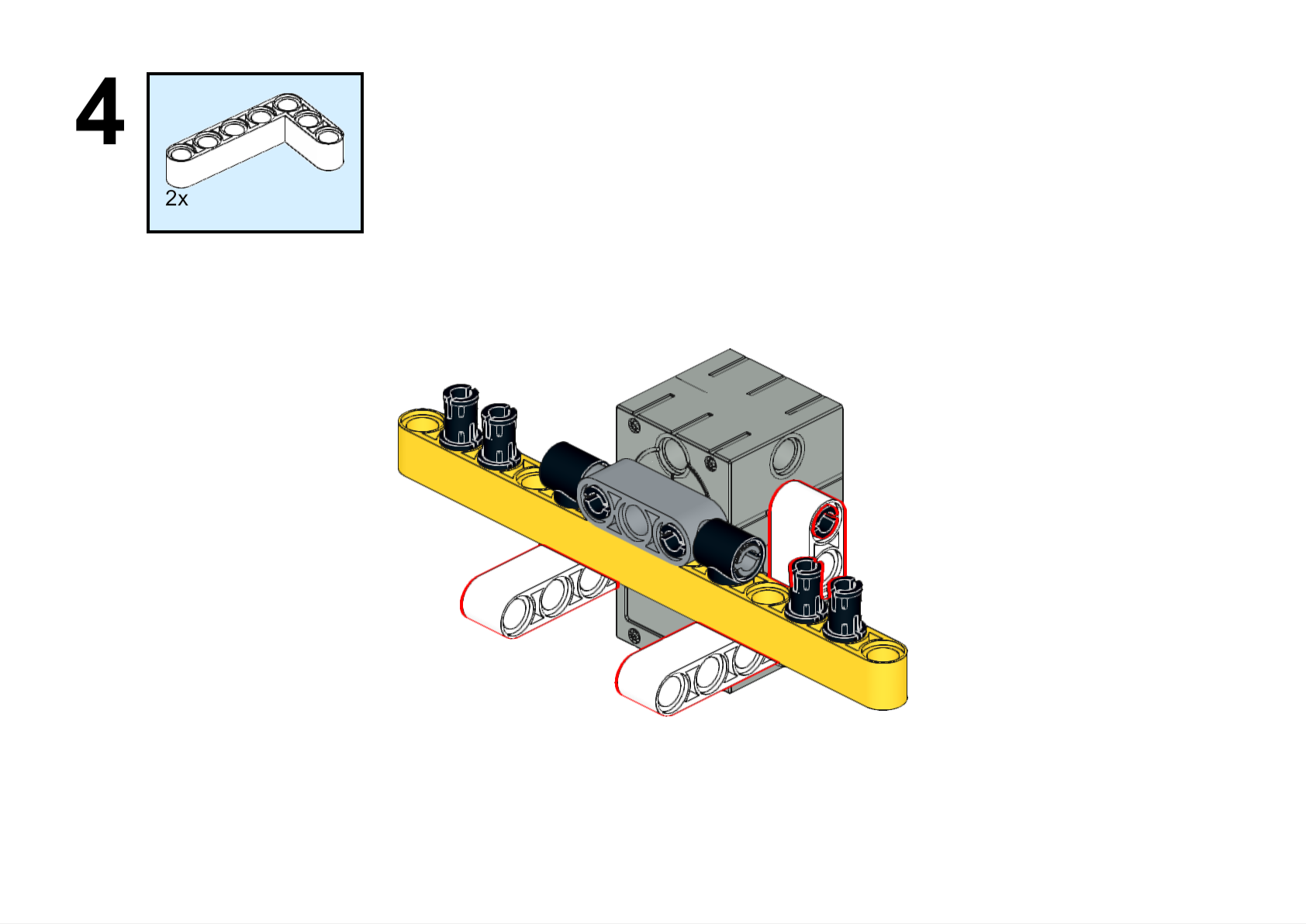
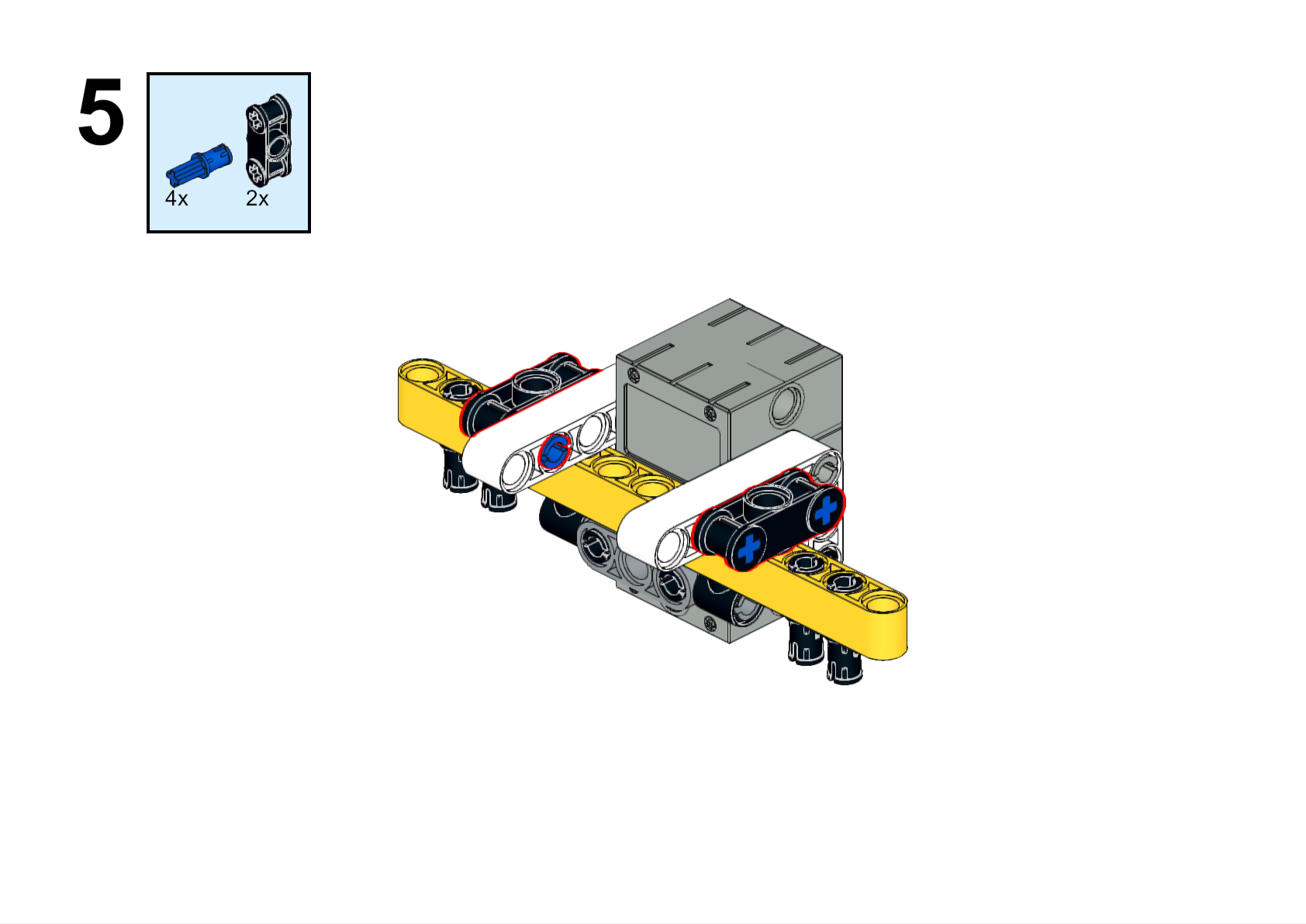
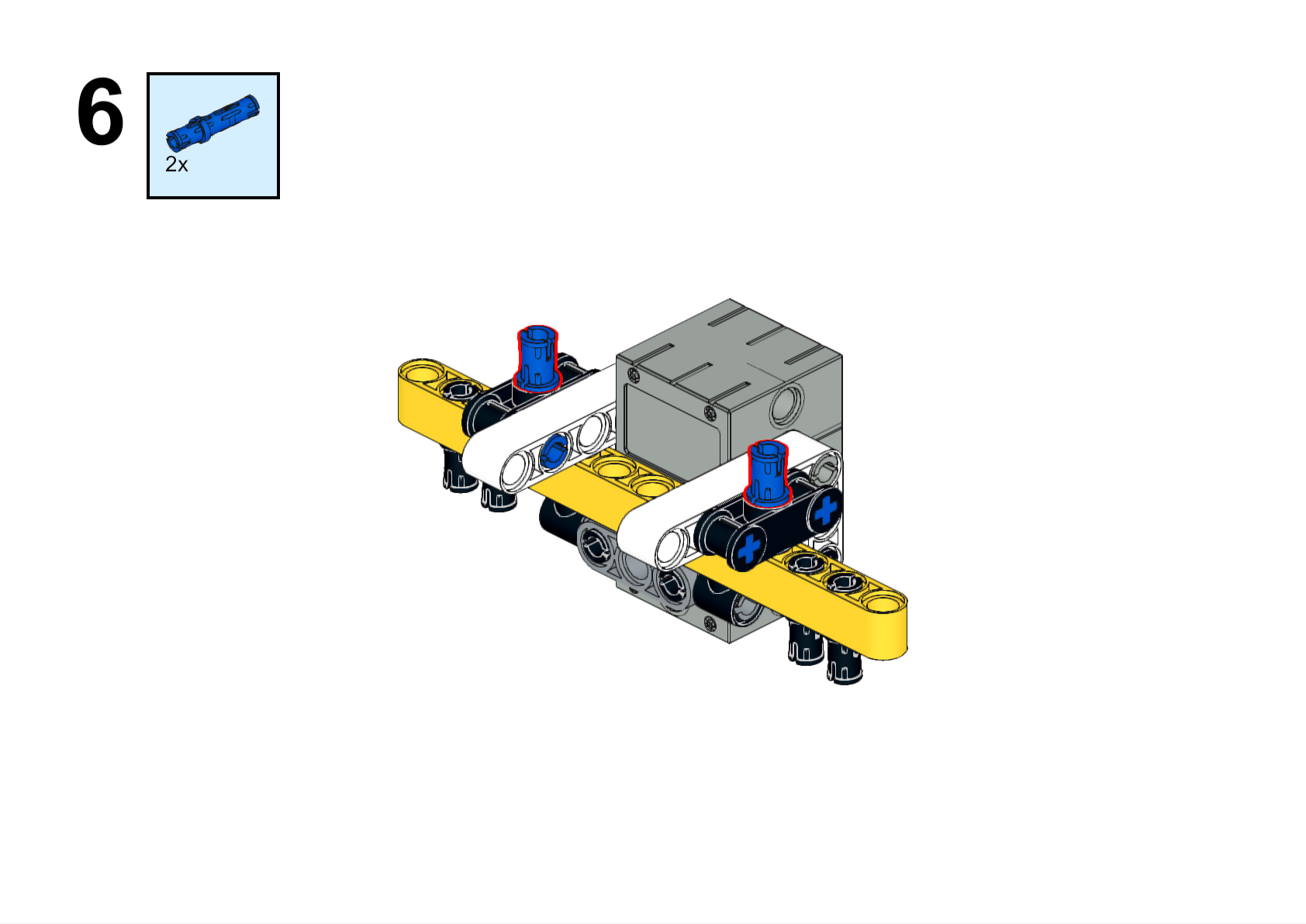
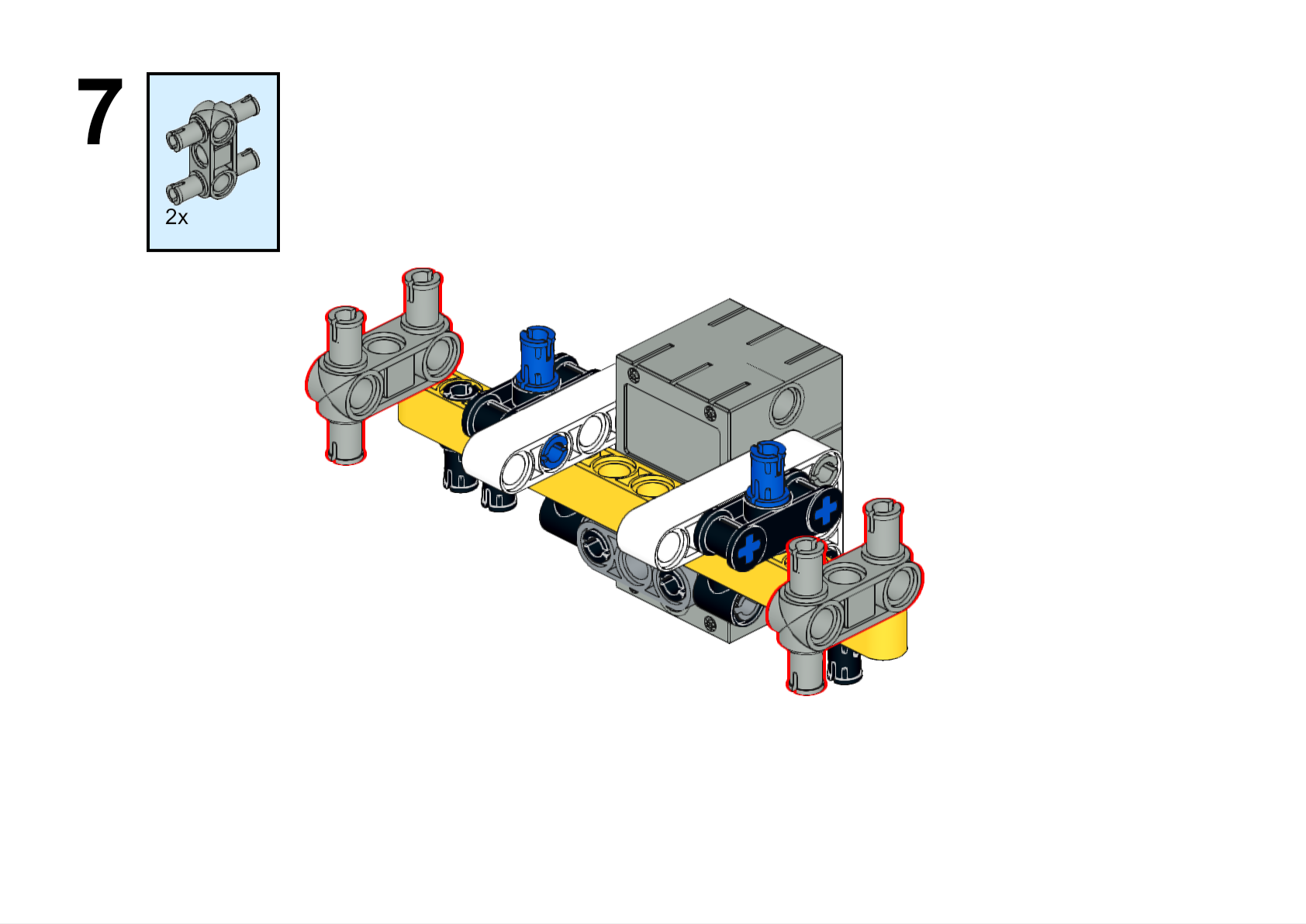
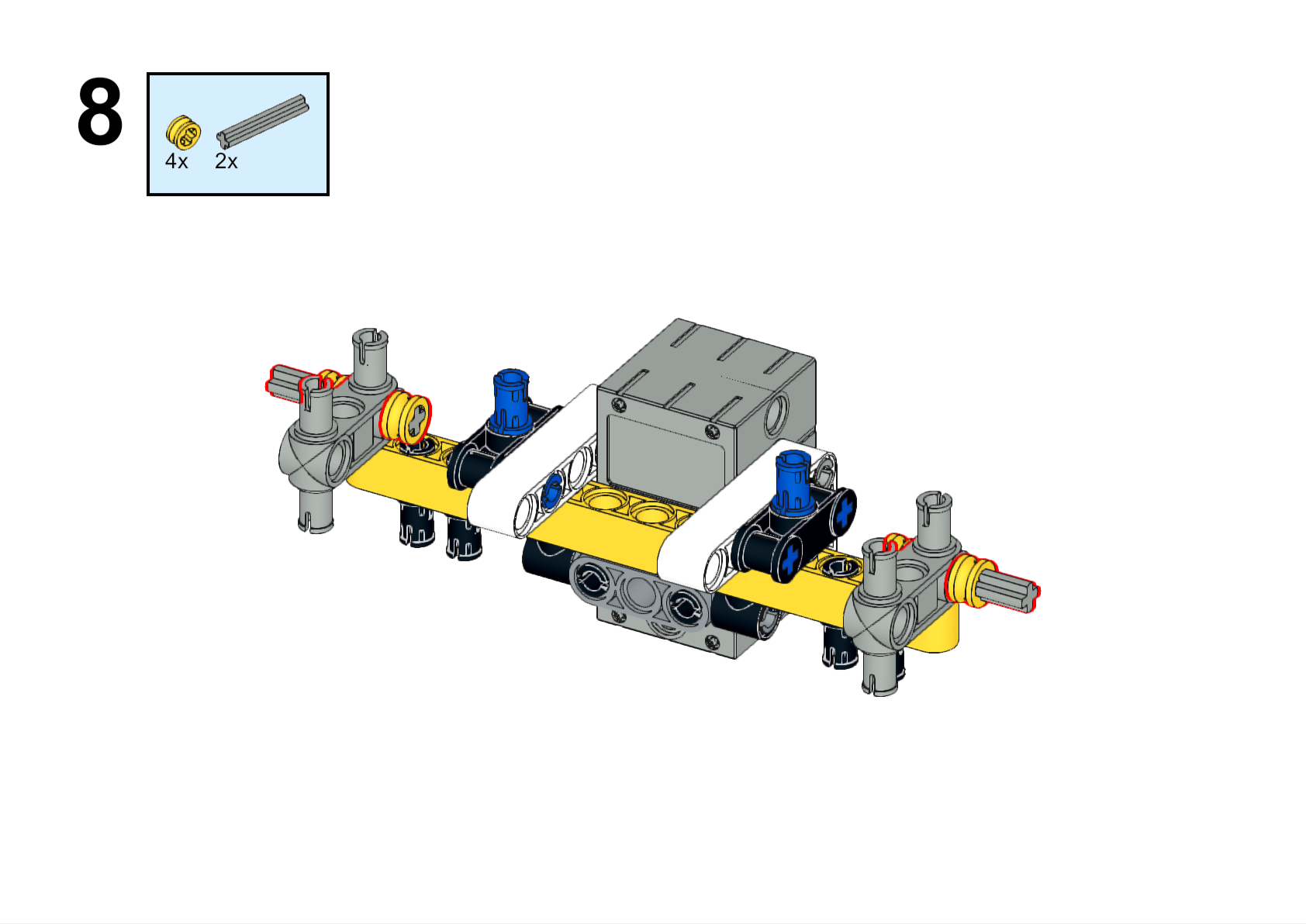
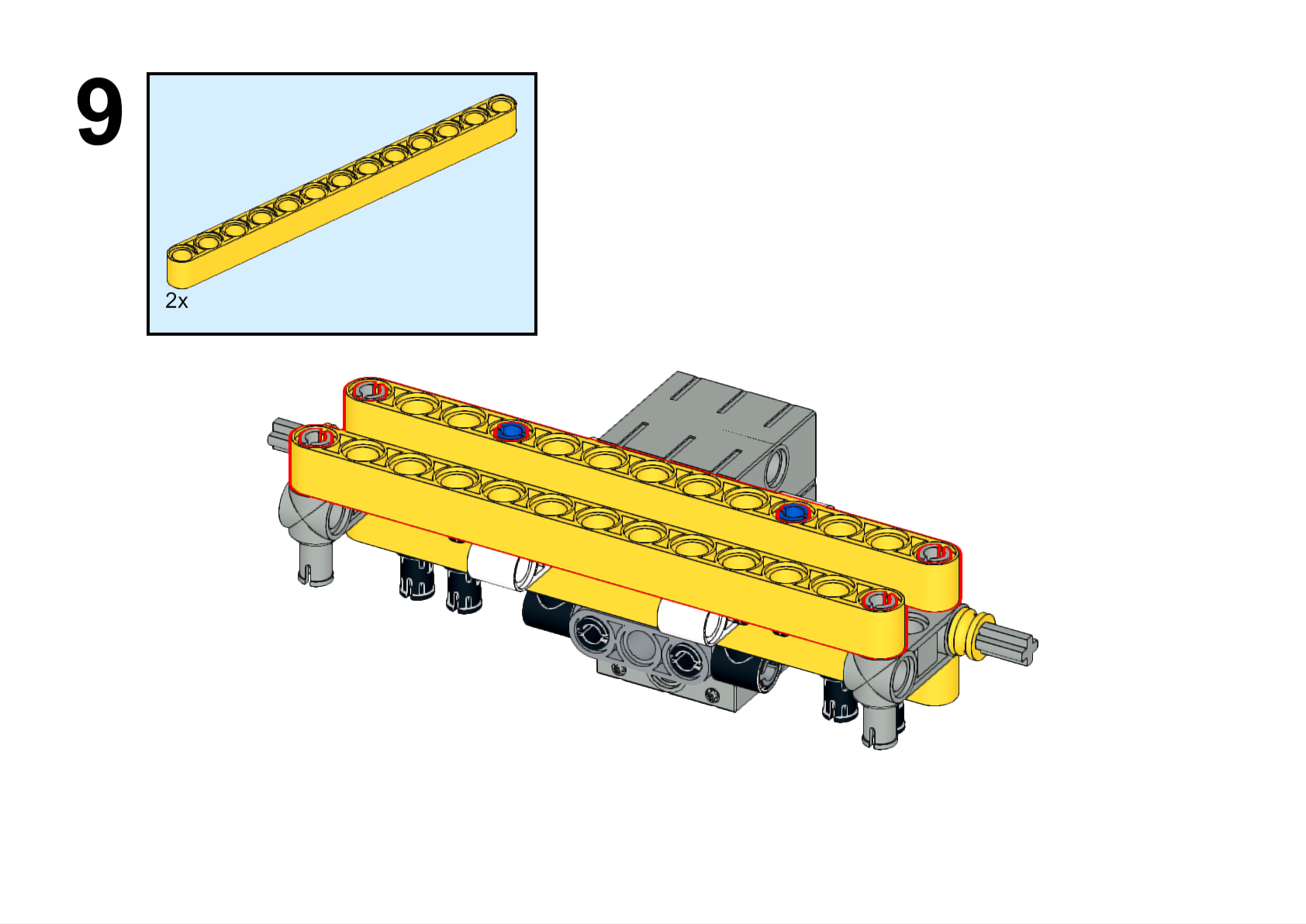
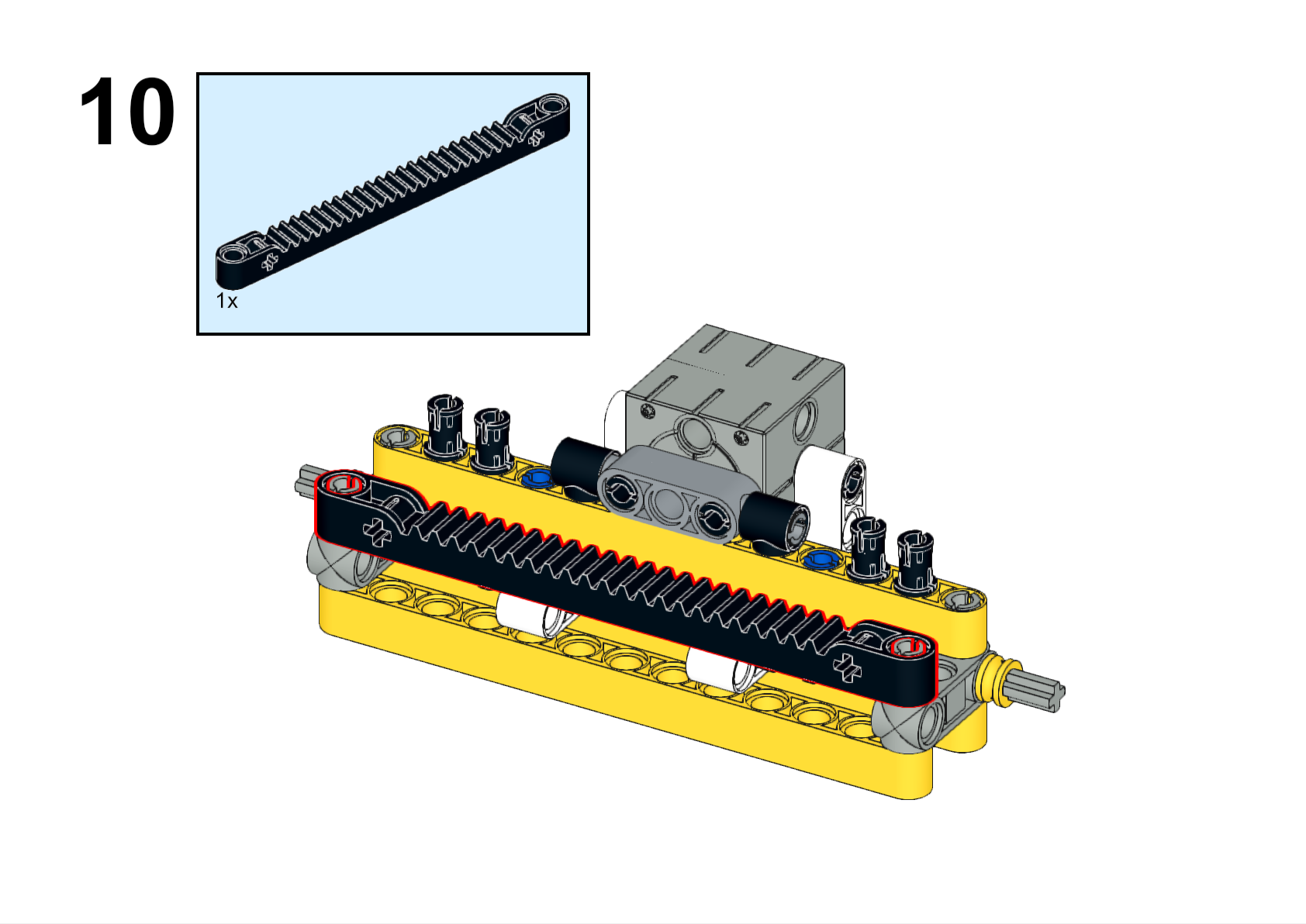
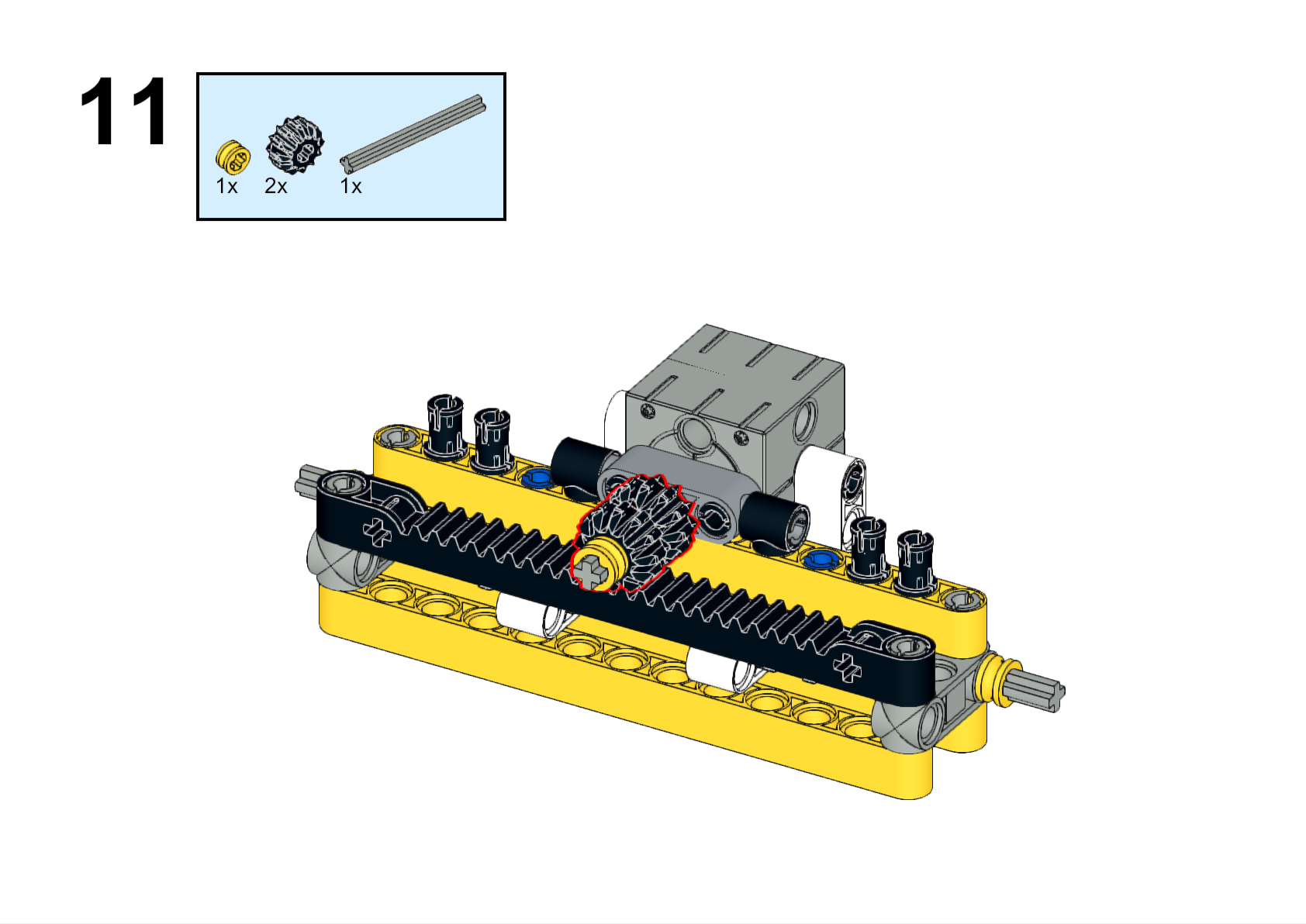
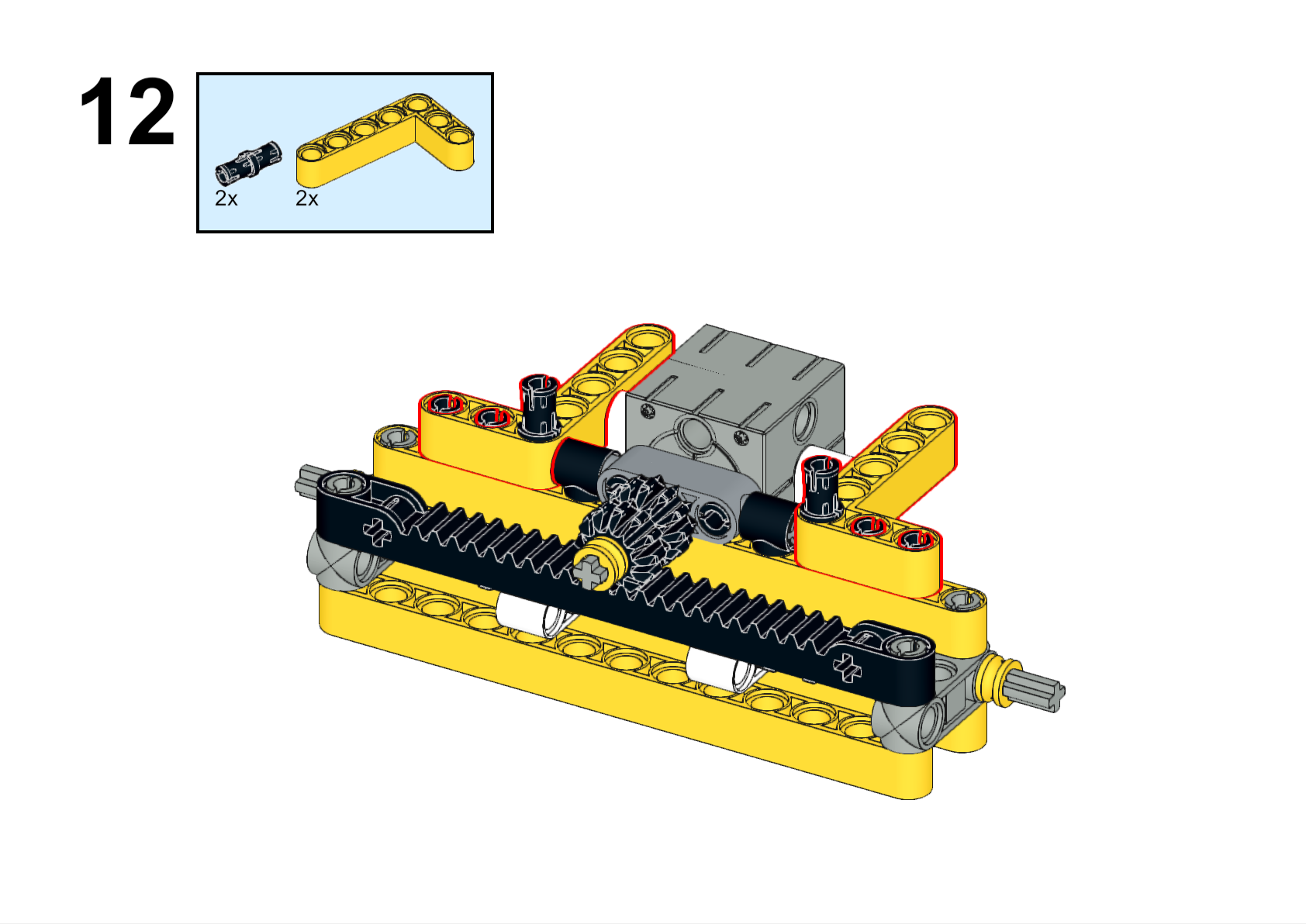
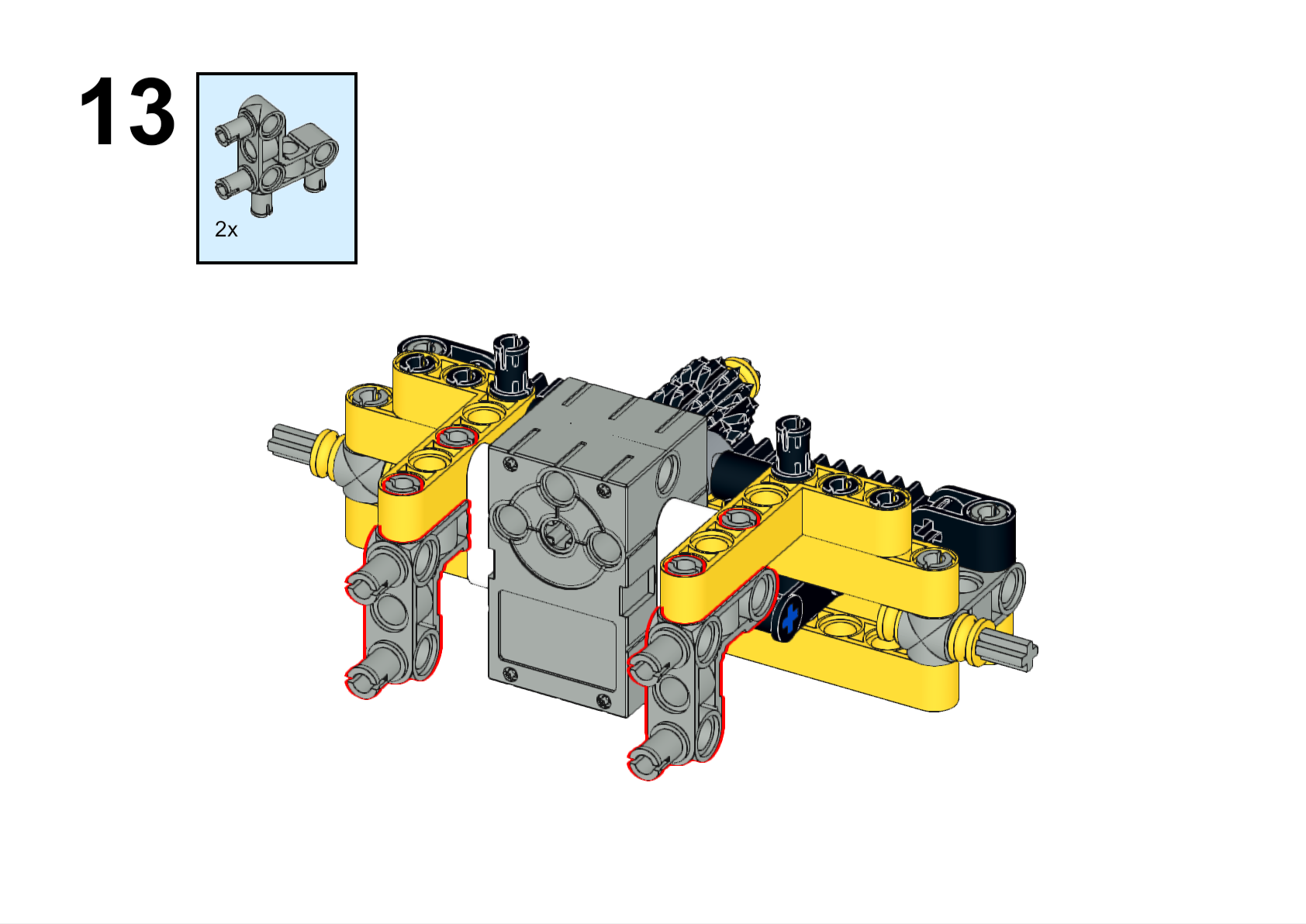
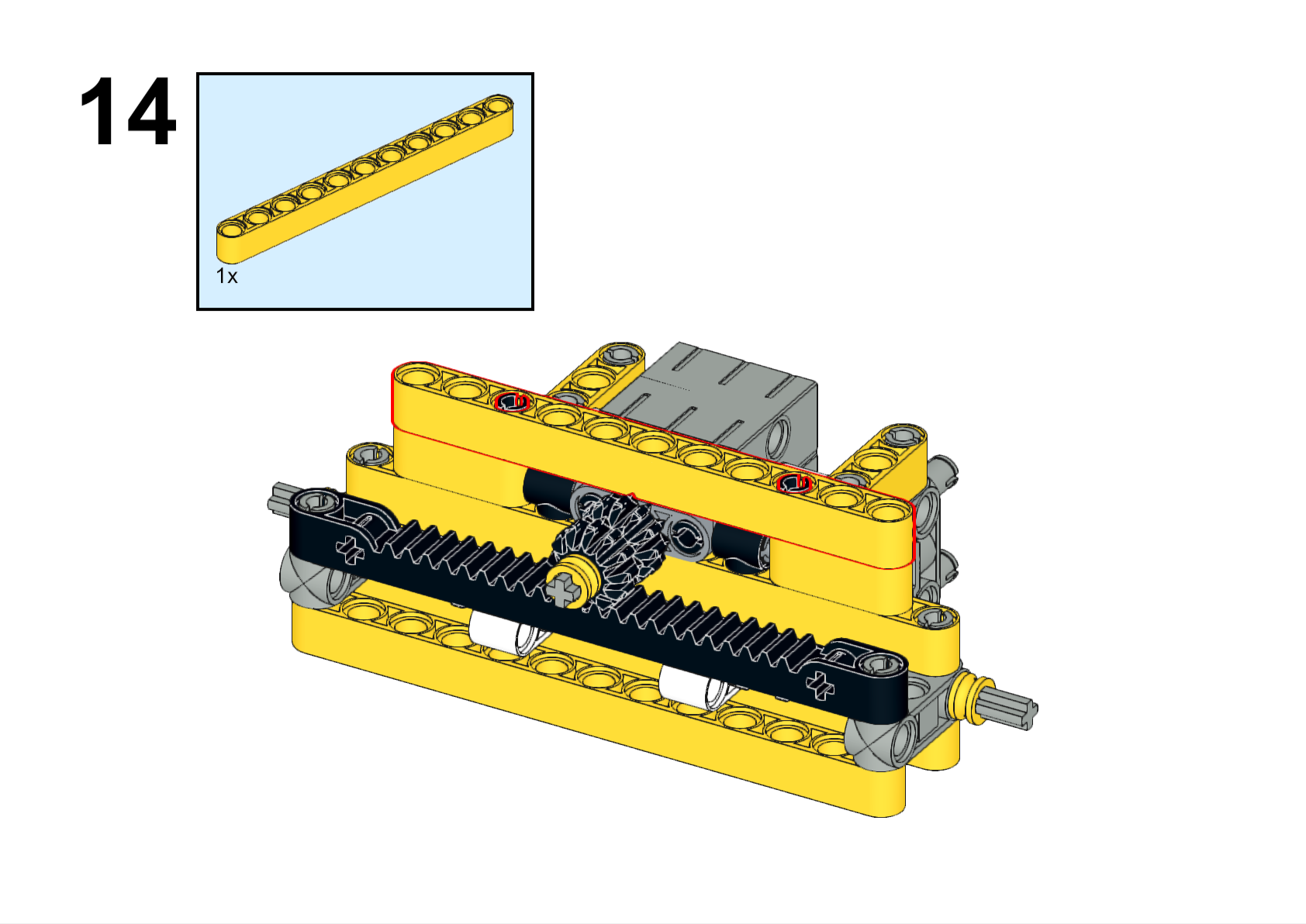
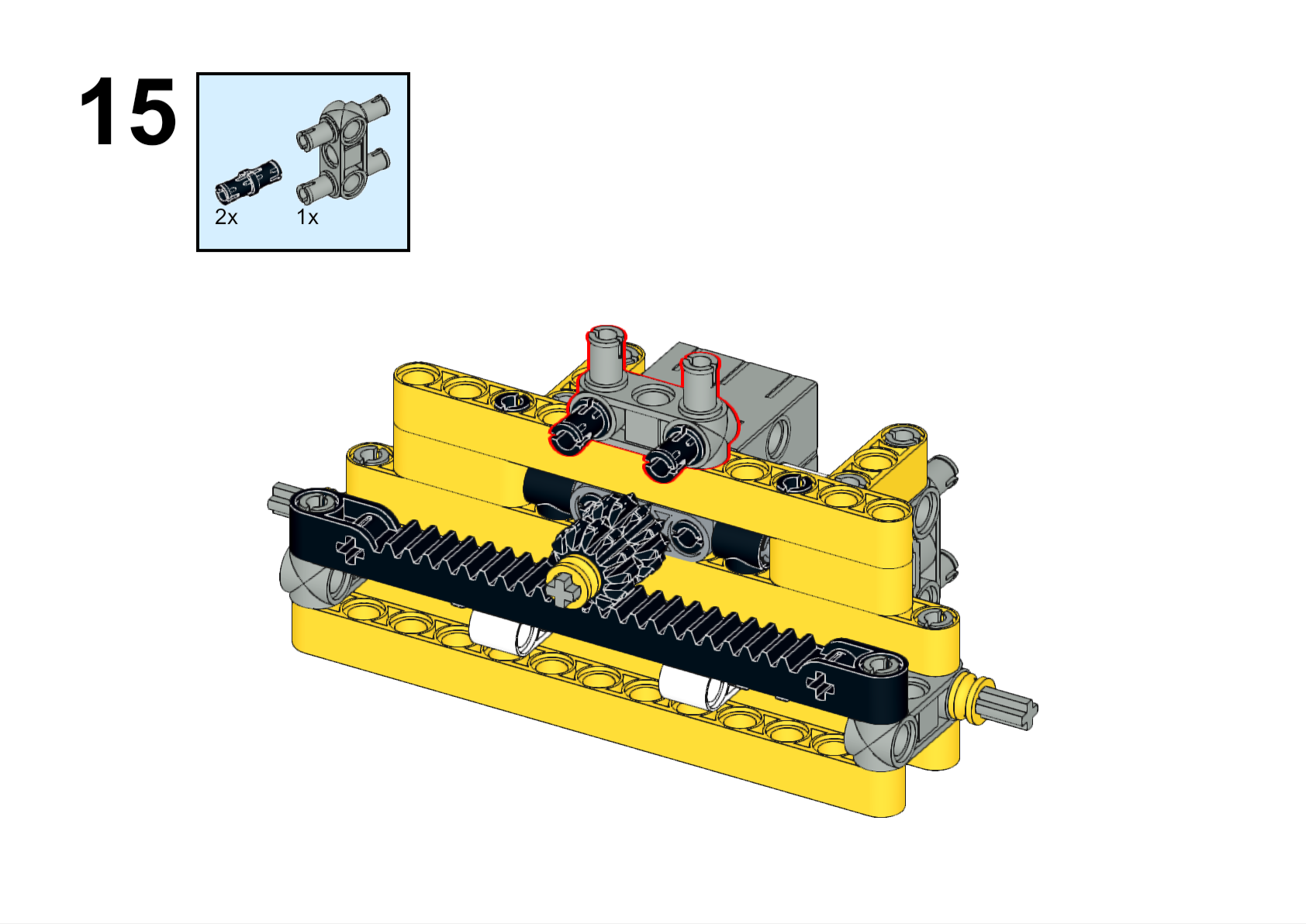
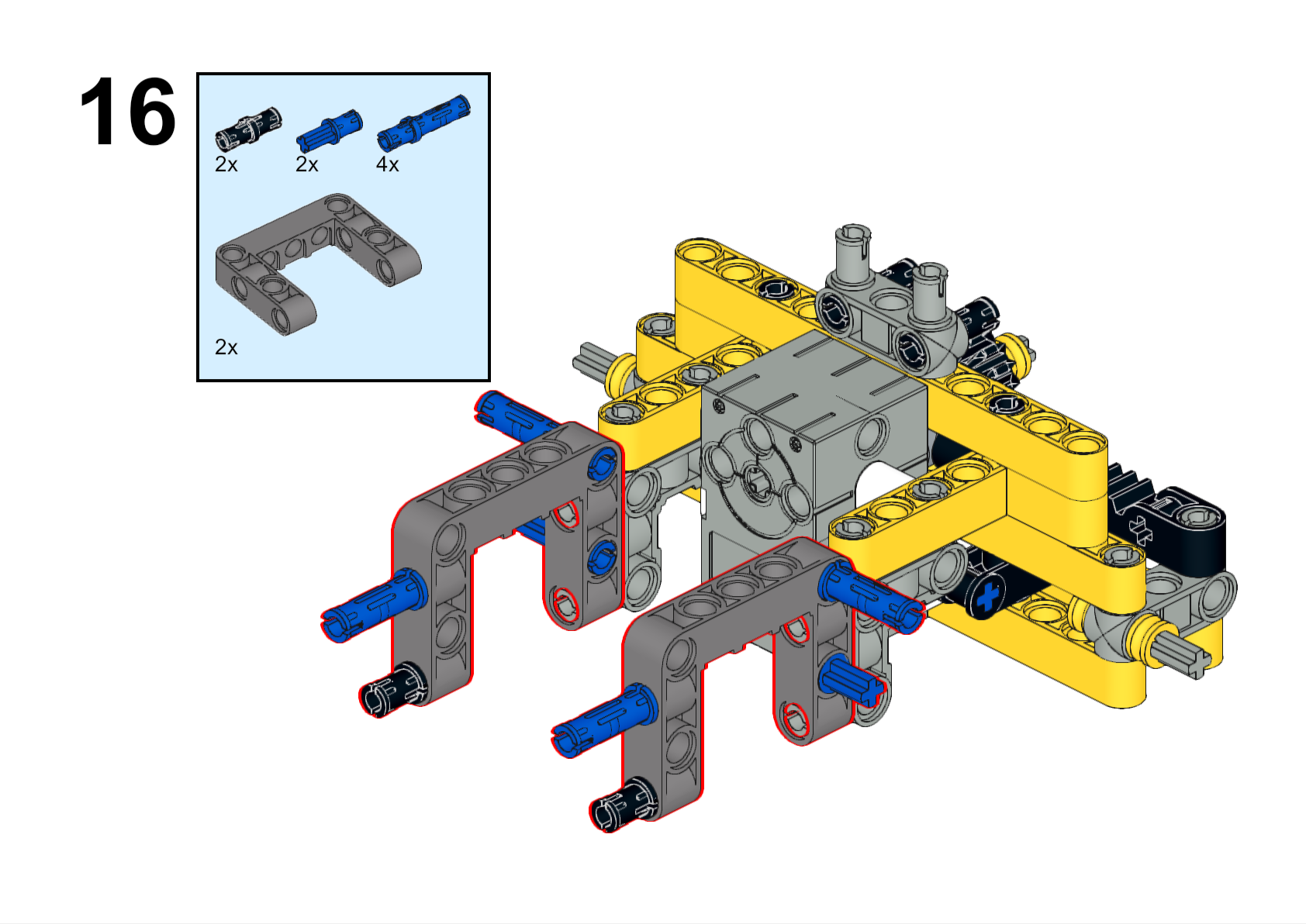
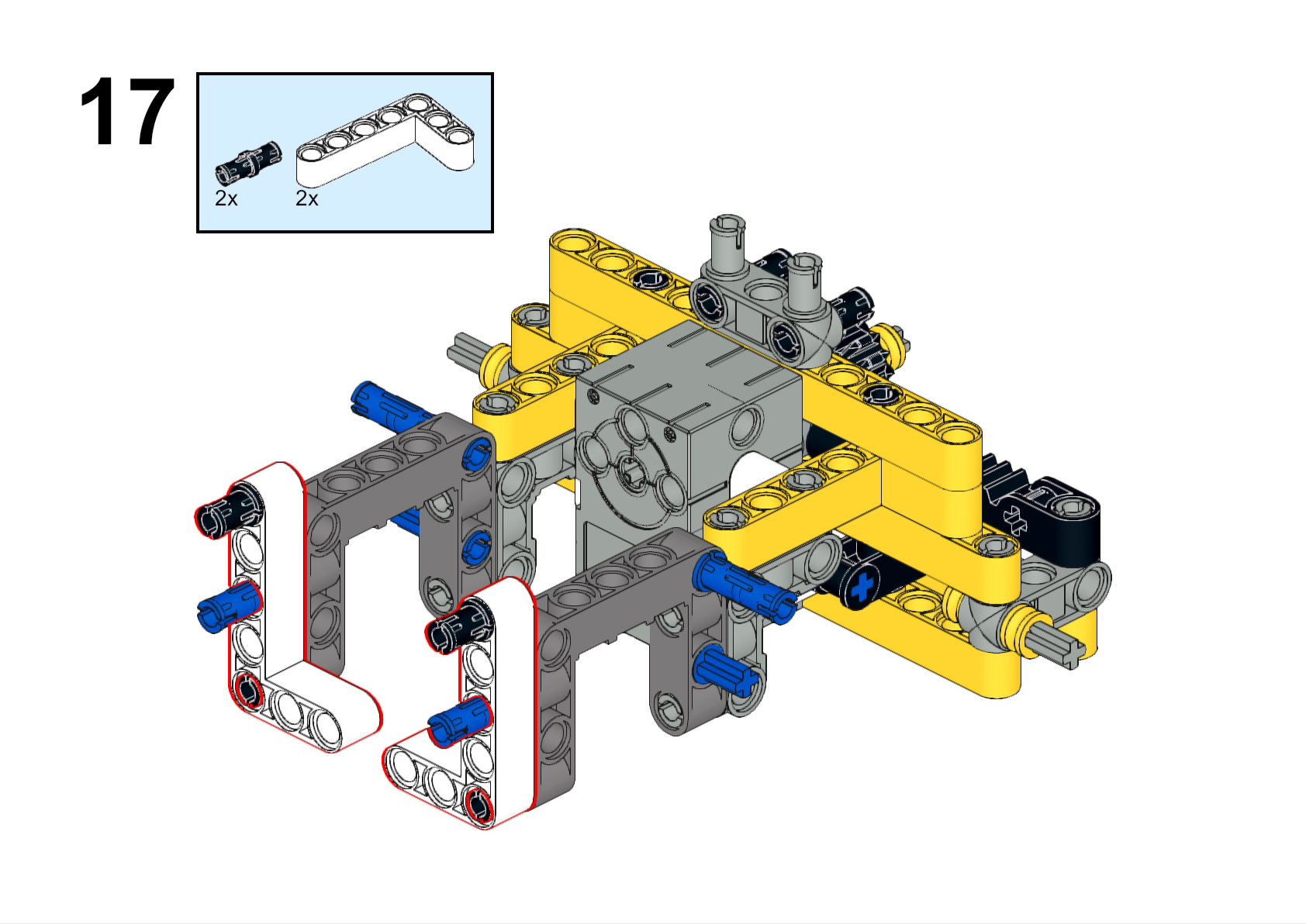
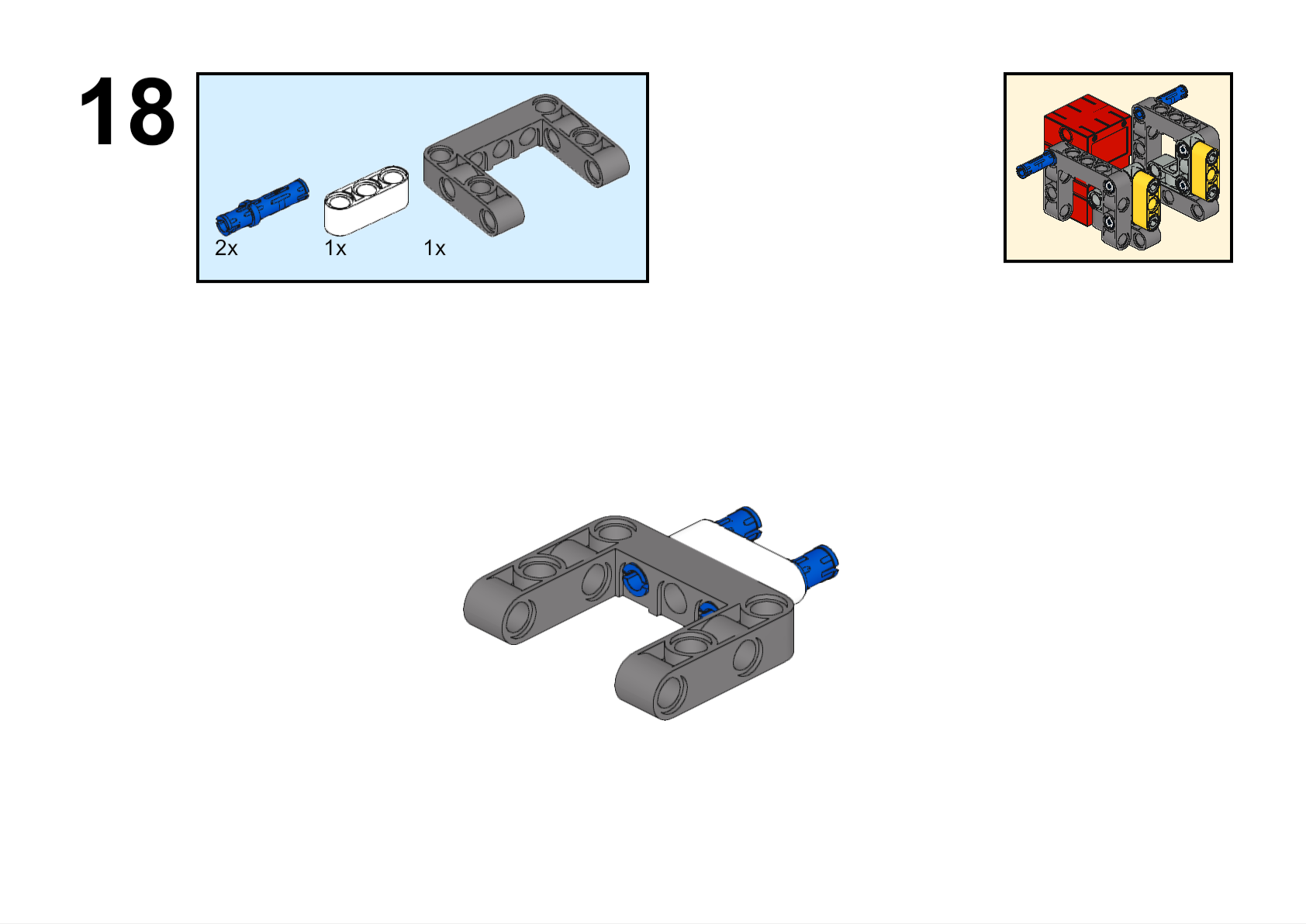
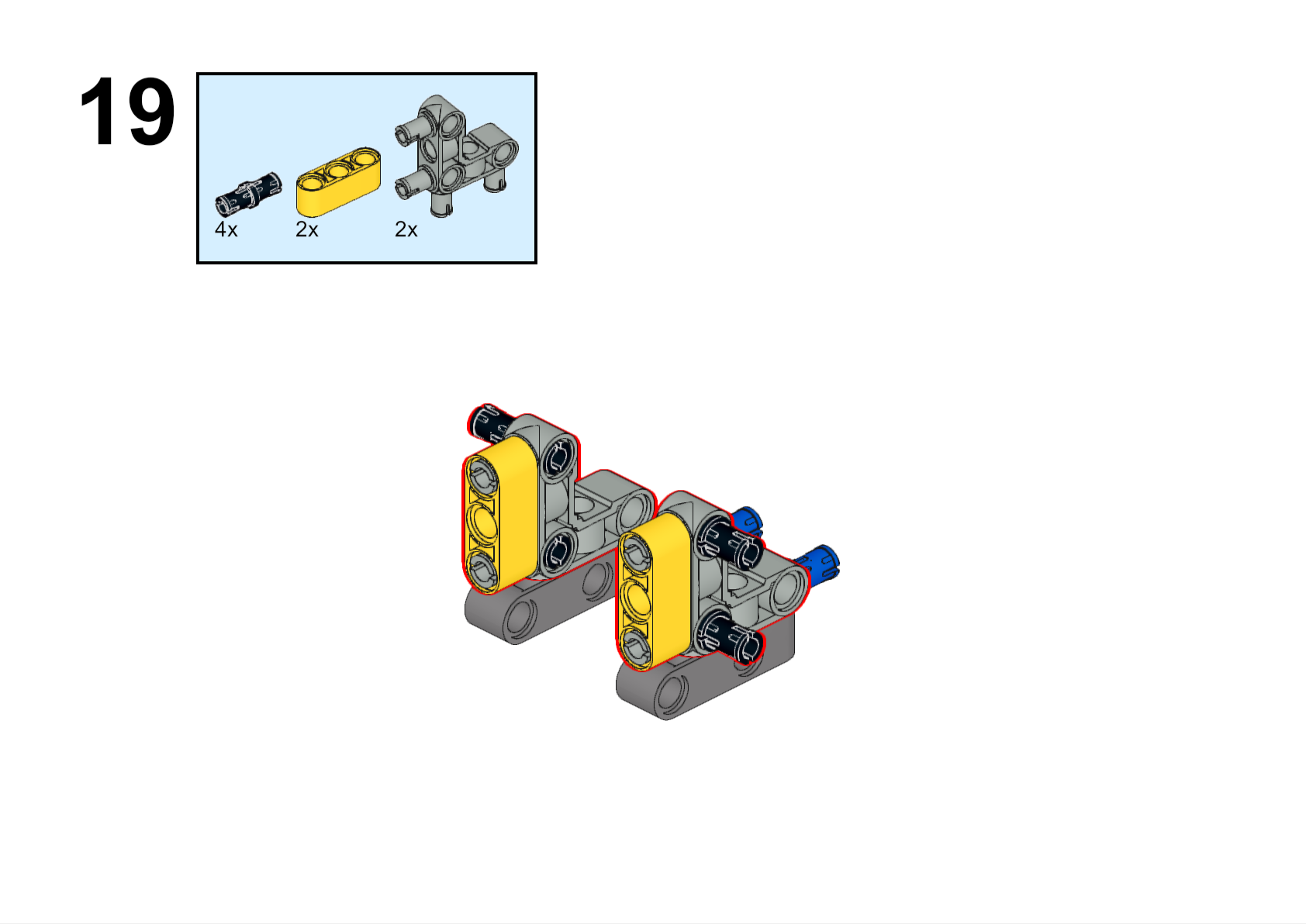
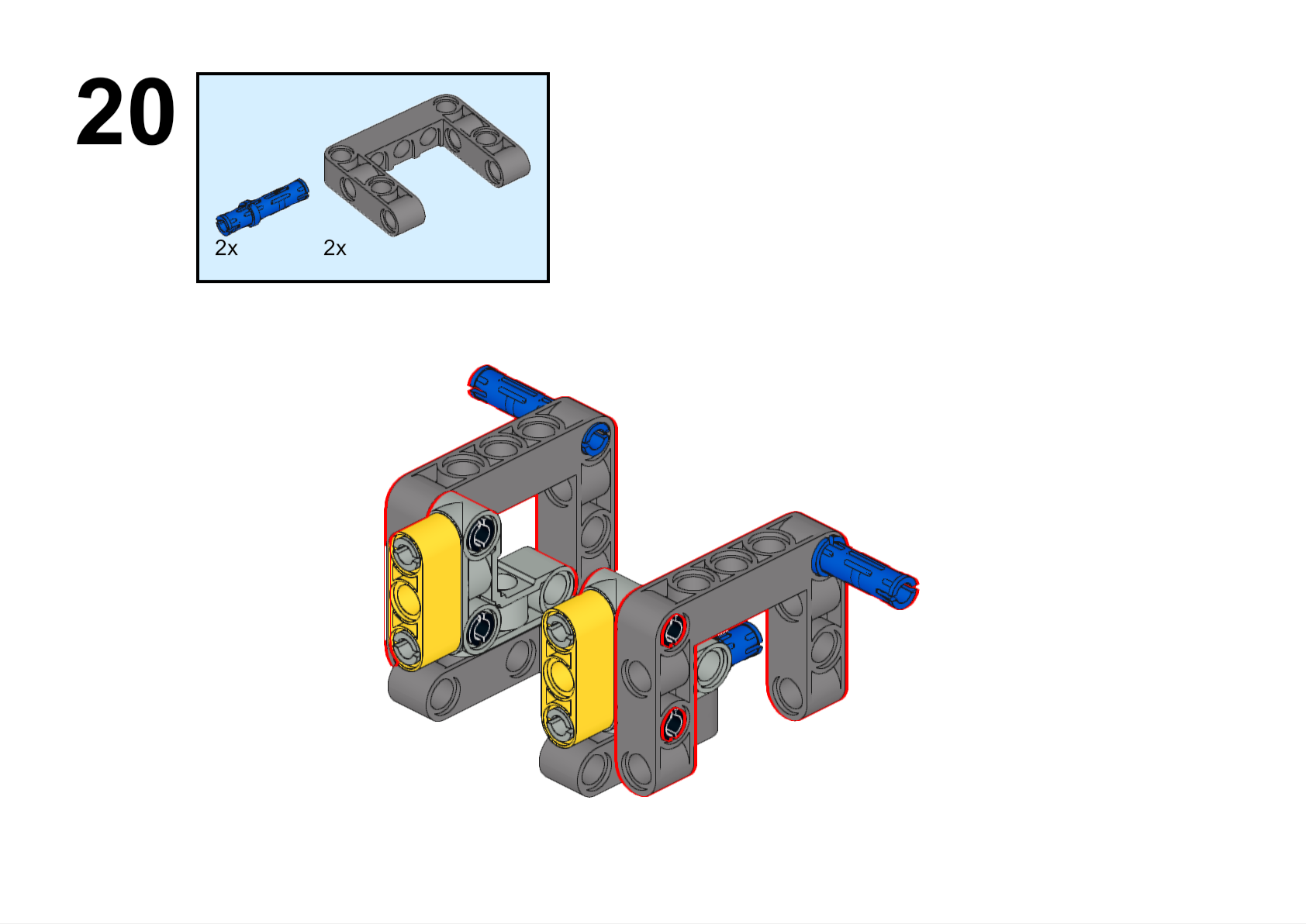
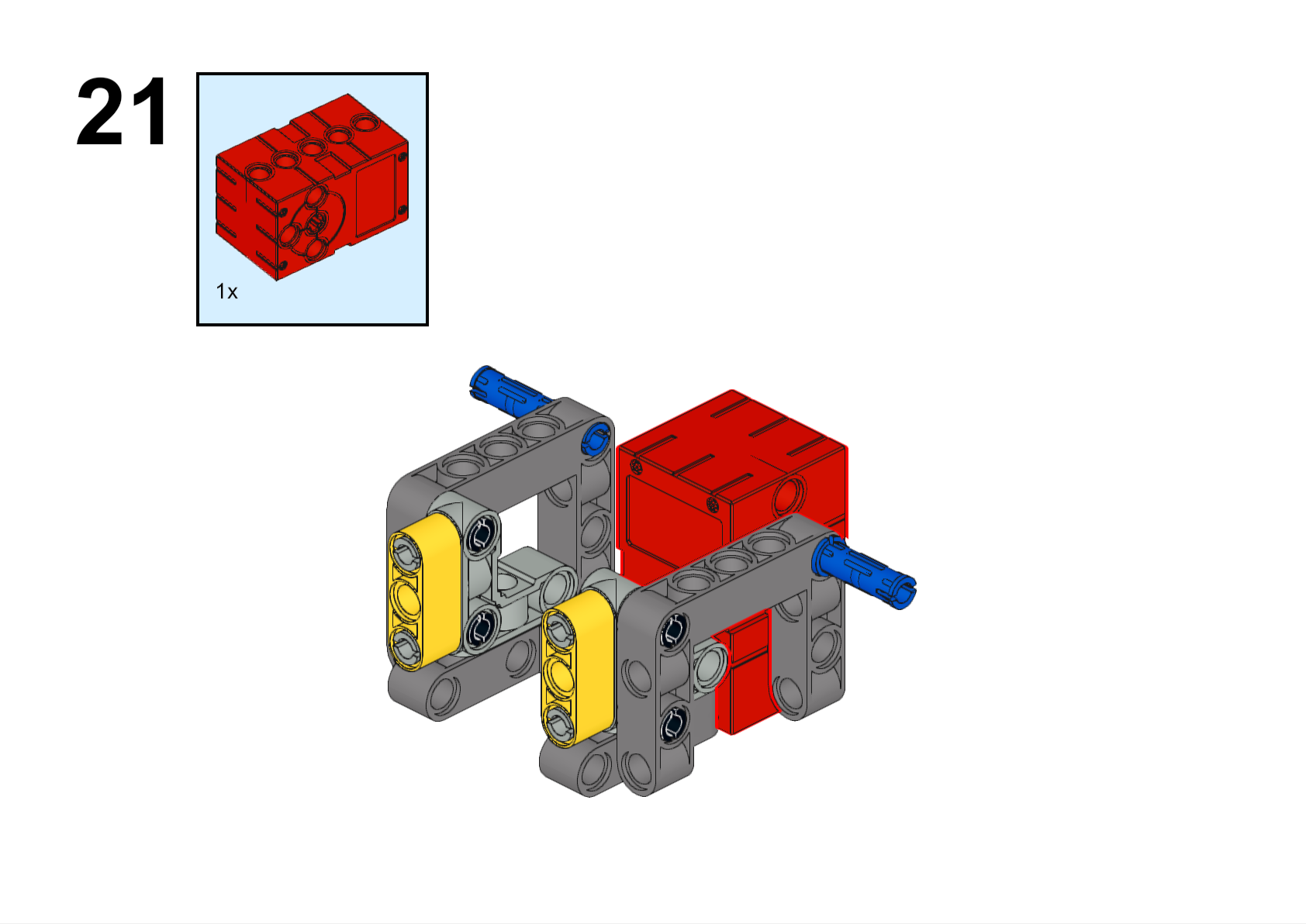
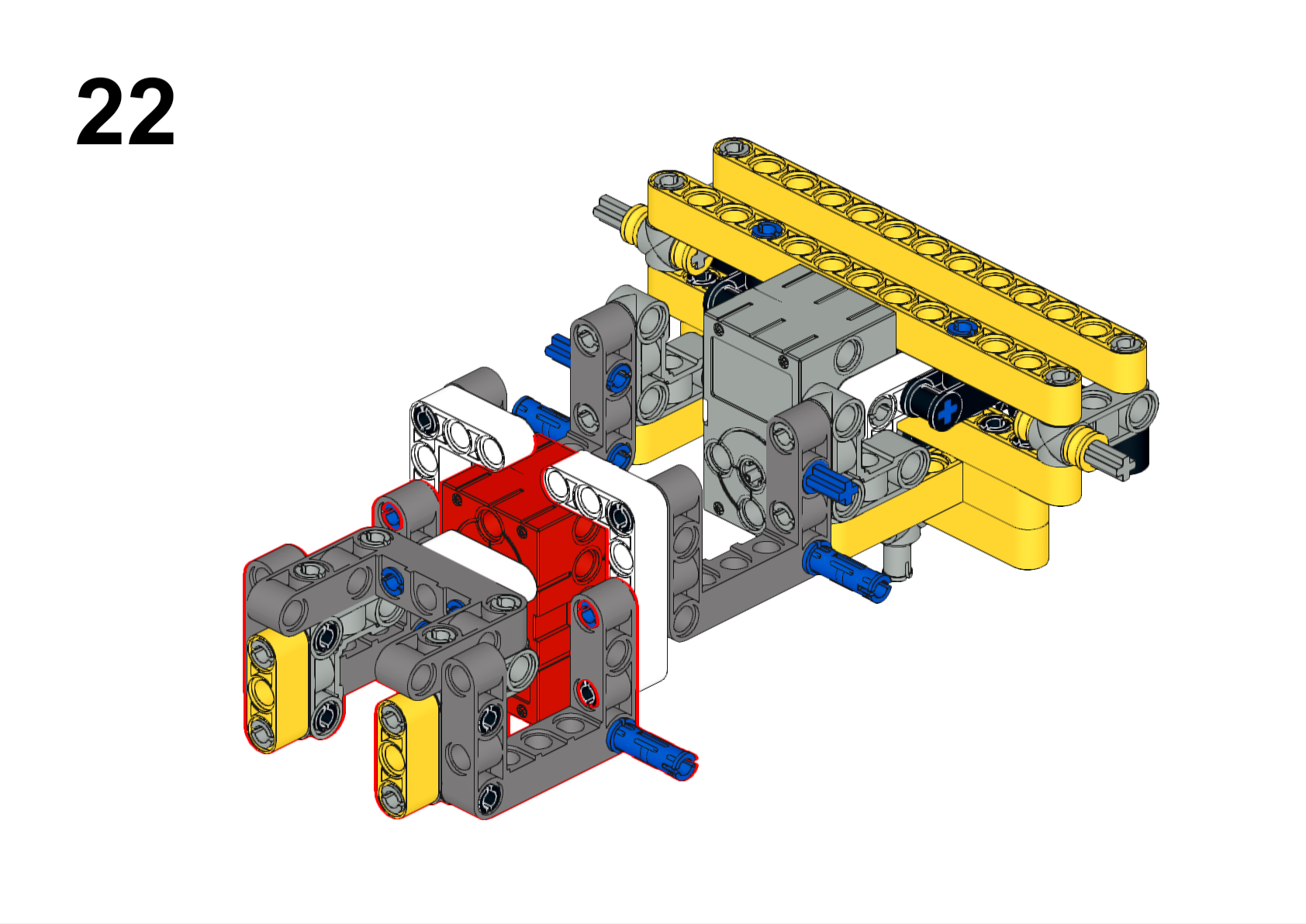
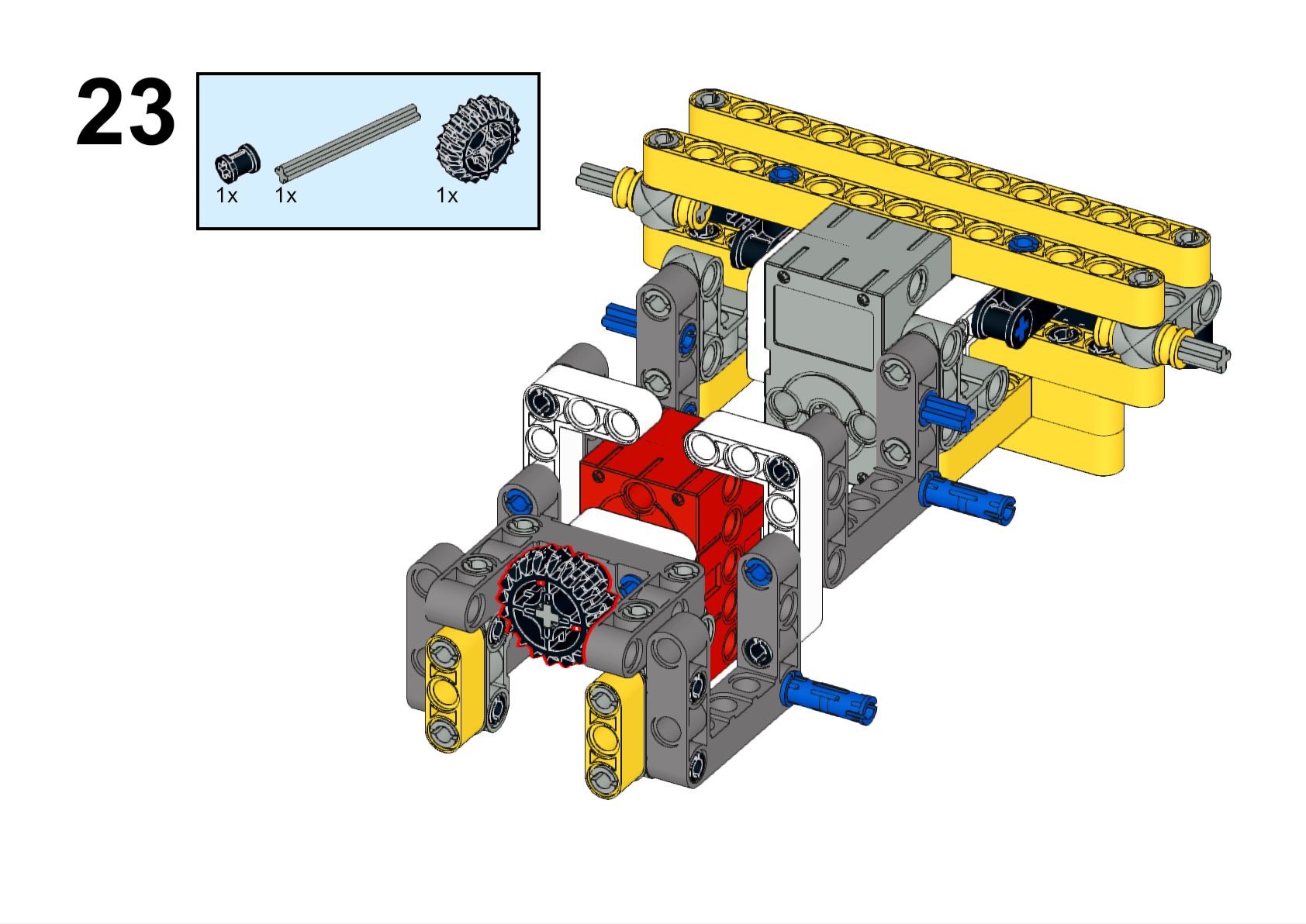
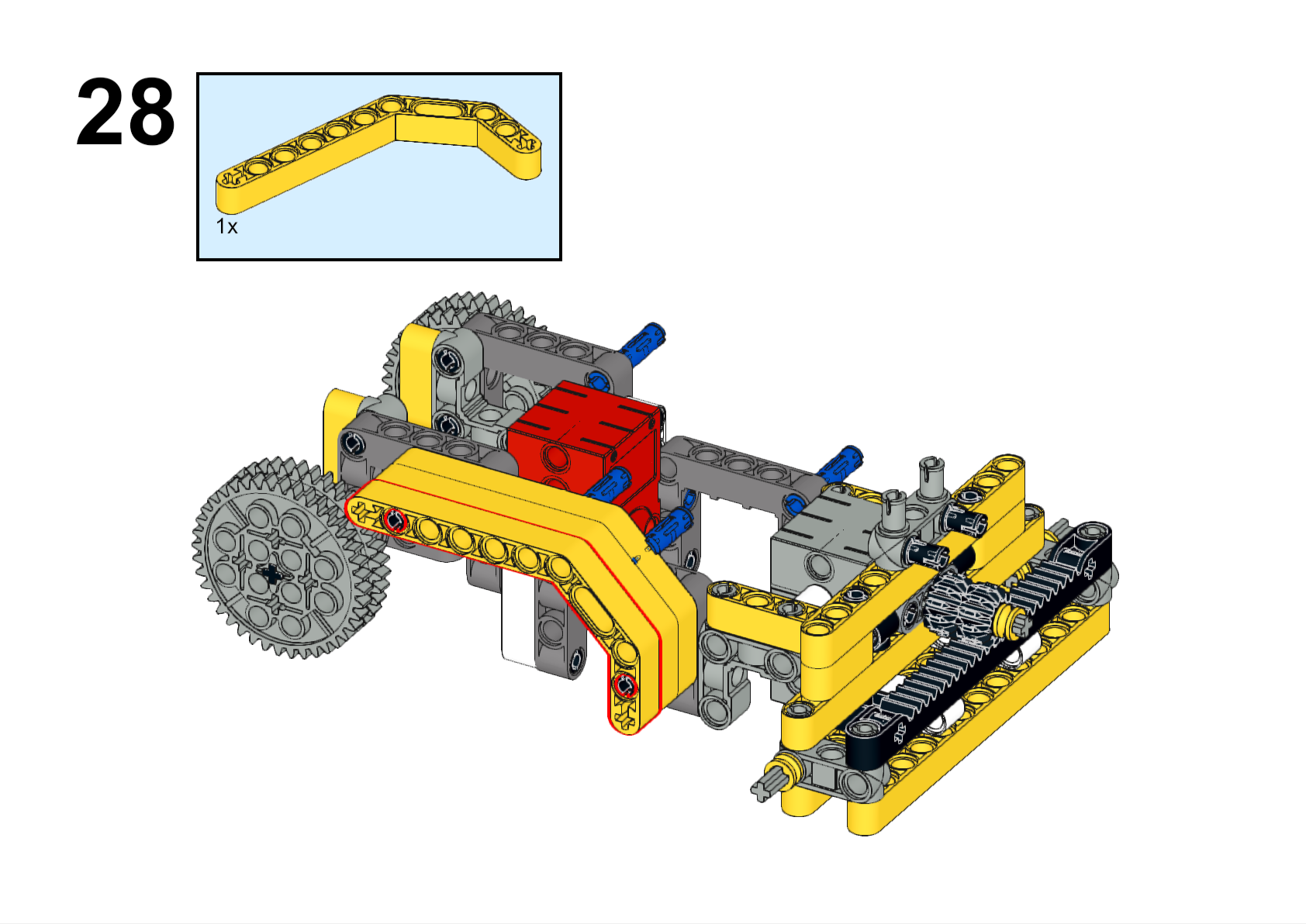
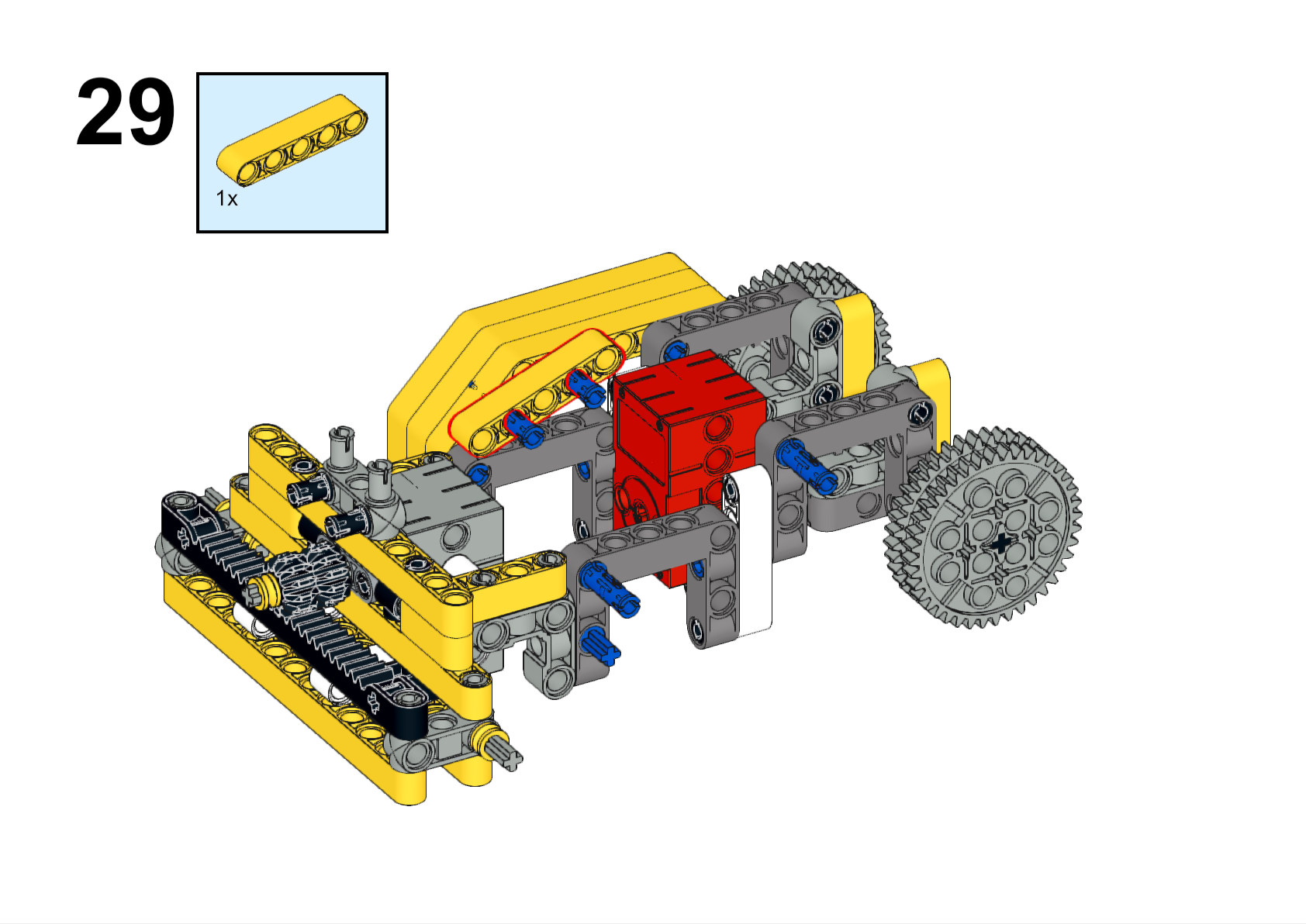
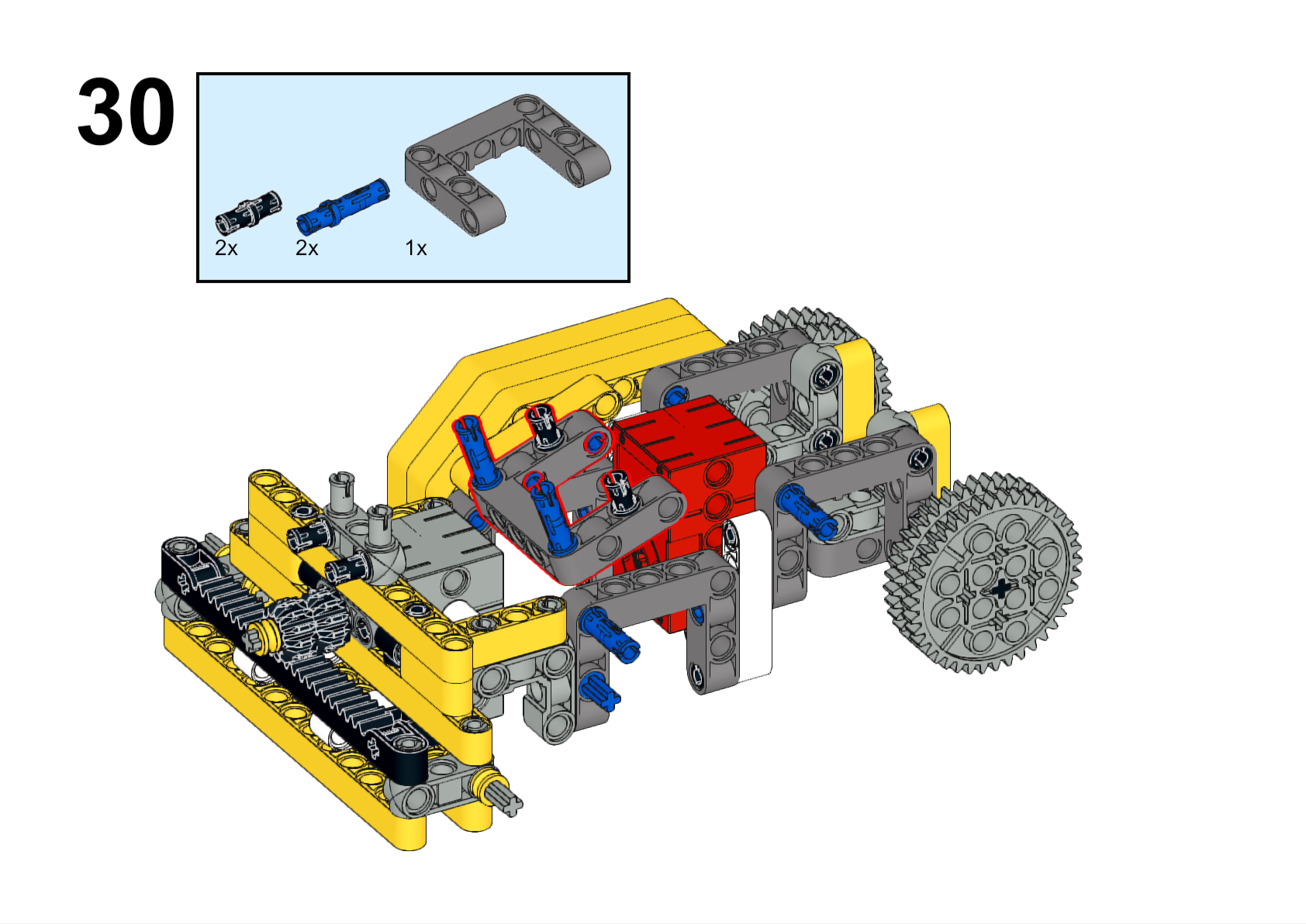
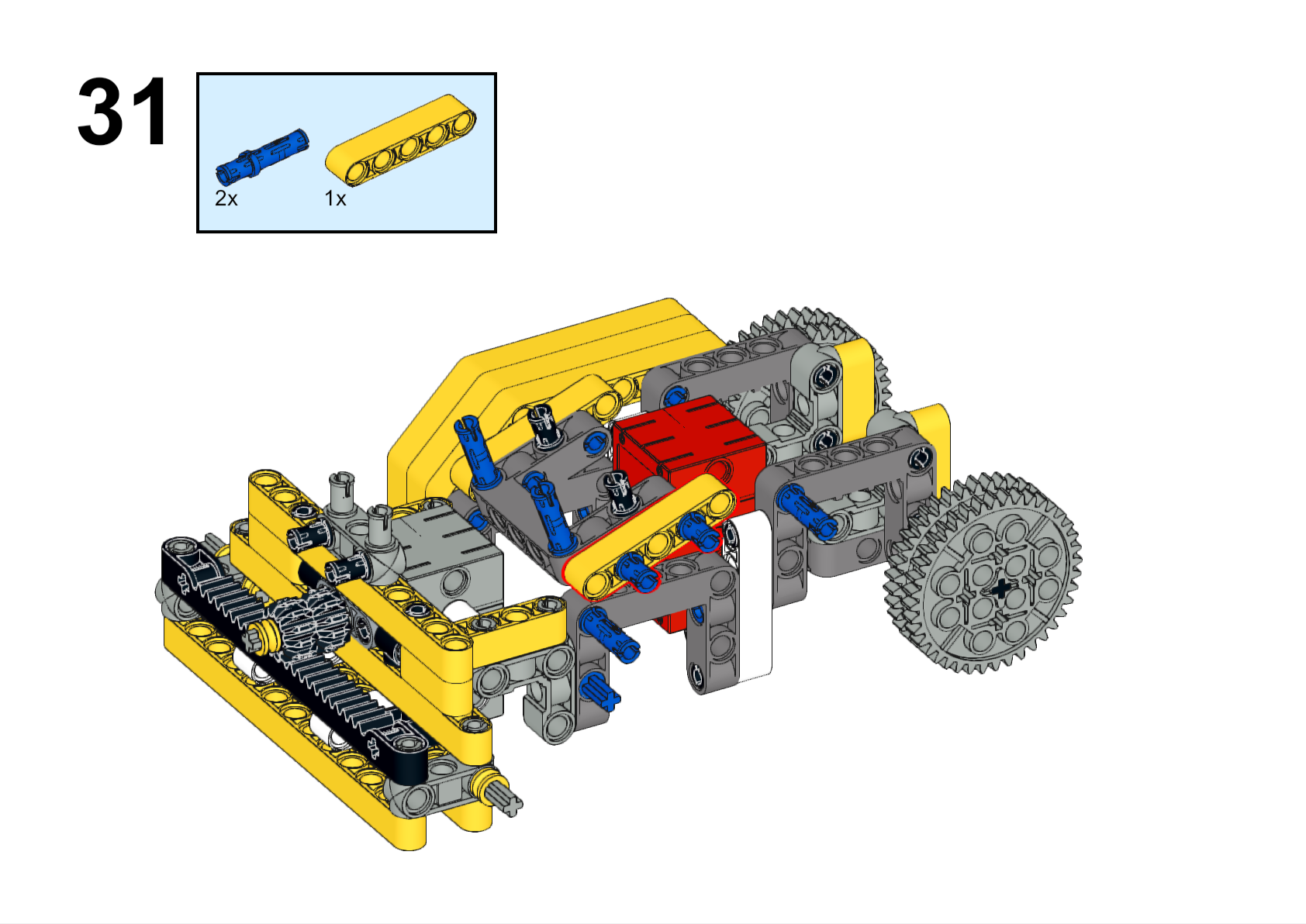
搭建步骤
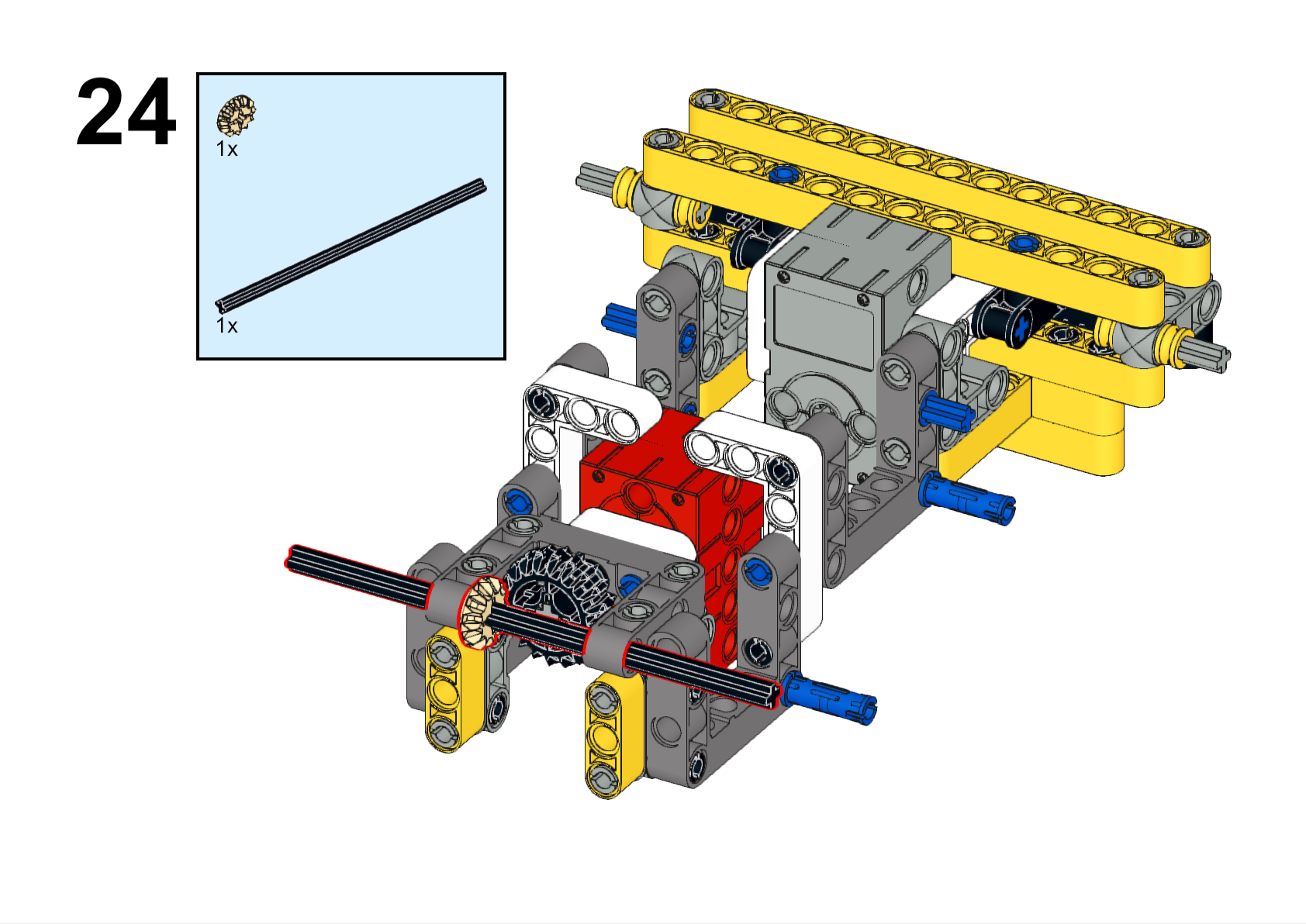
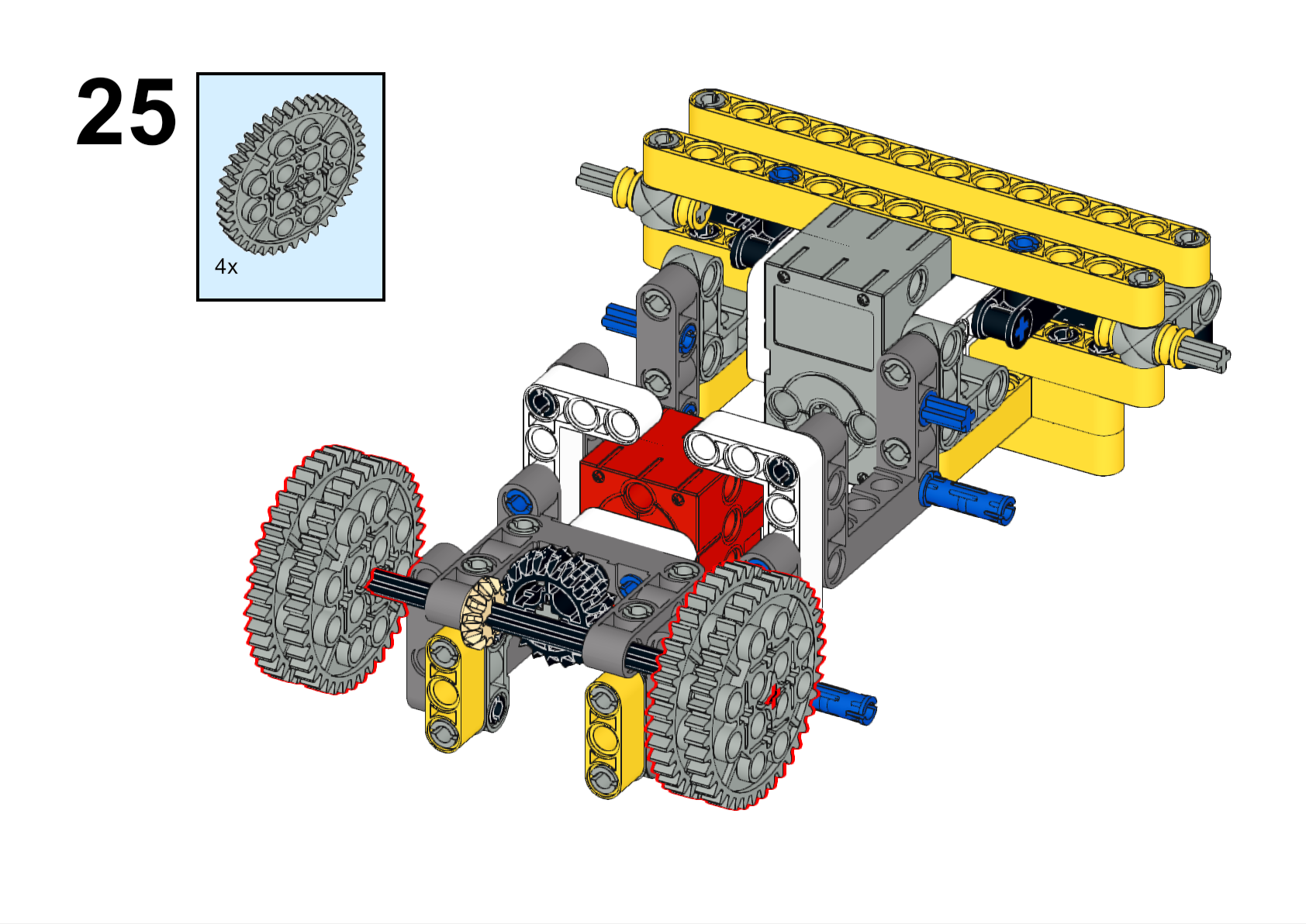
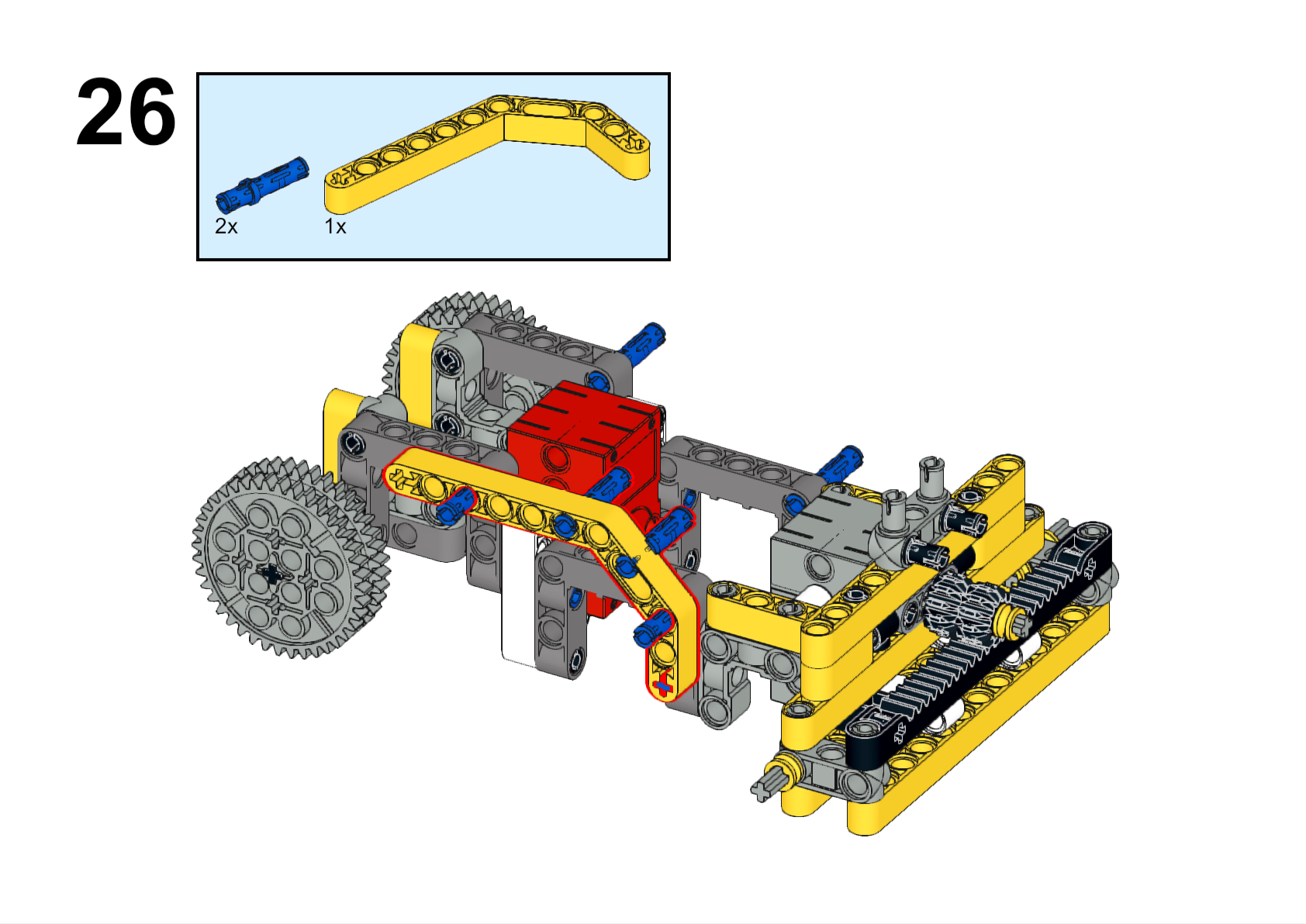
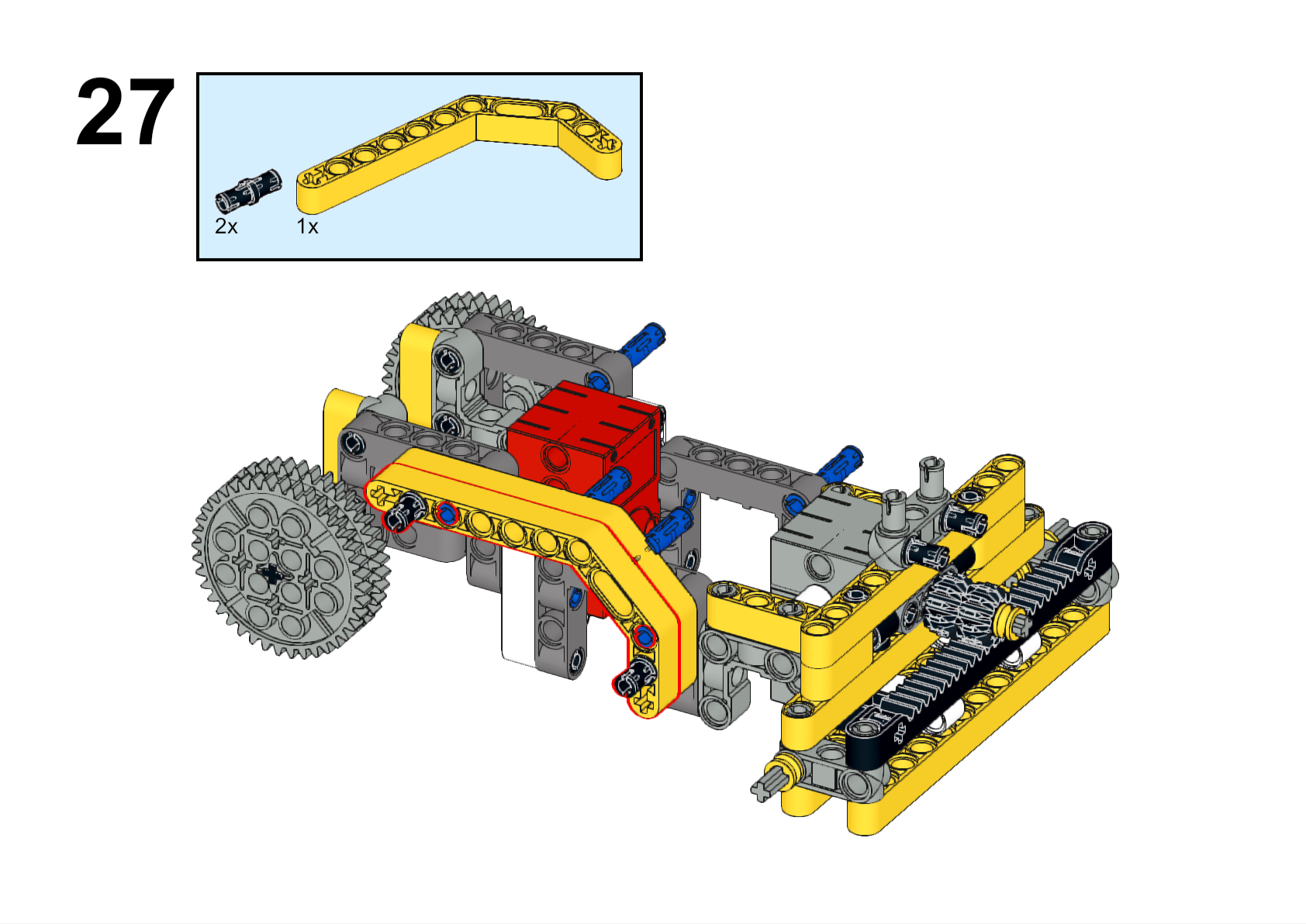
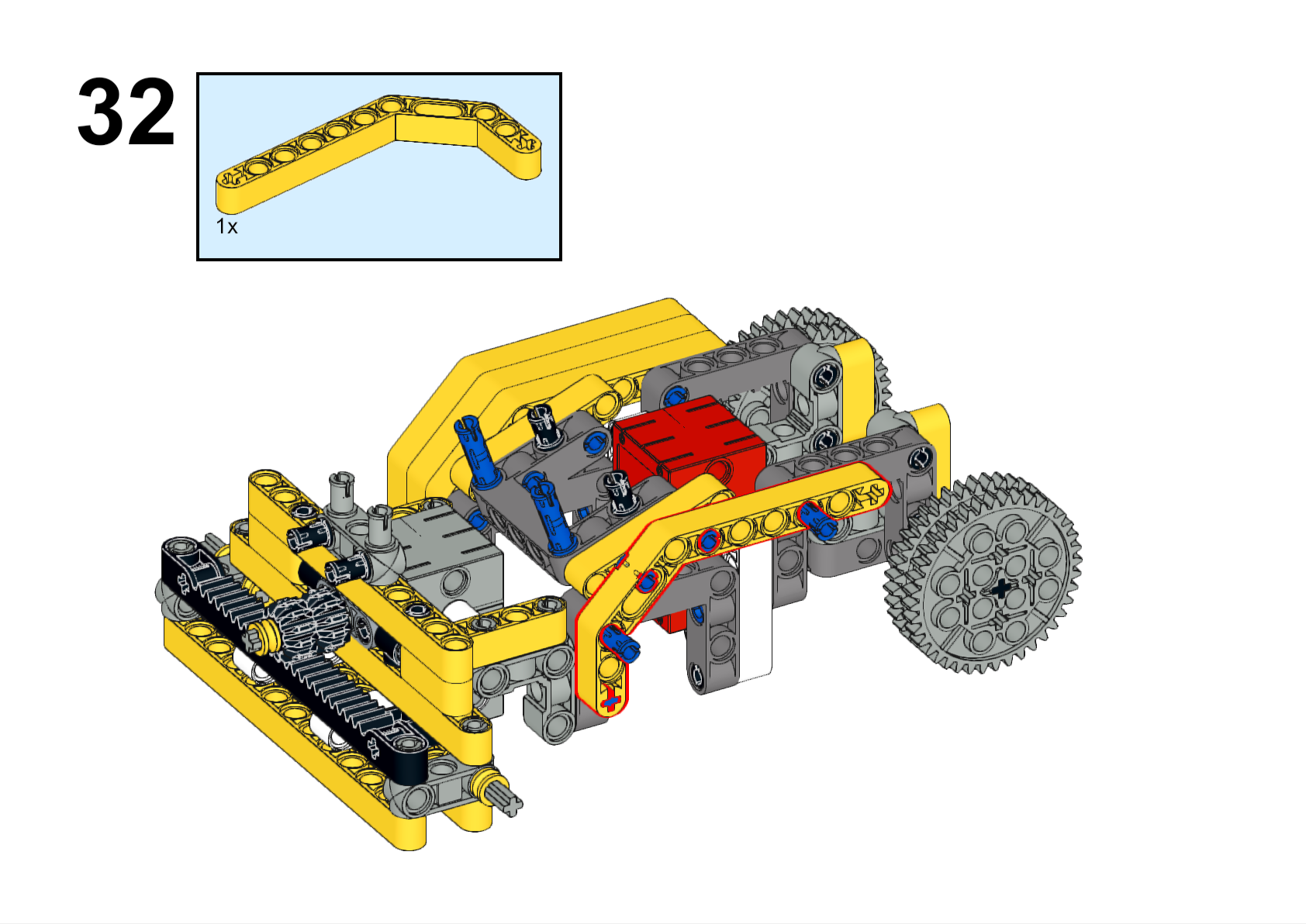
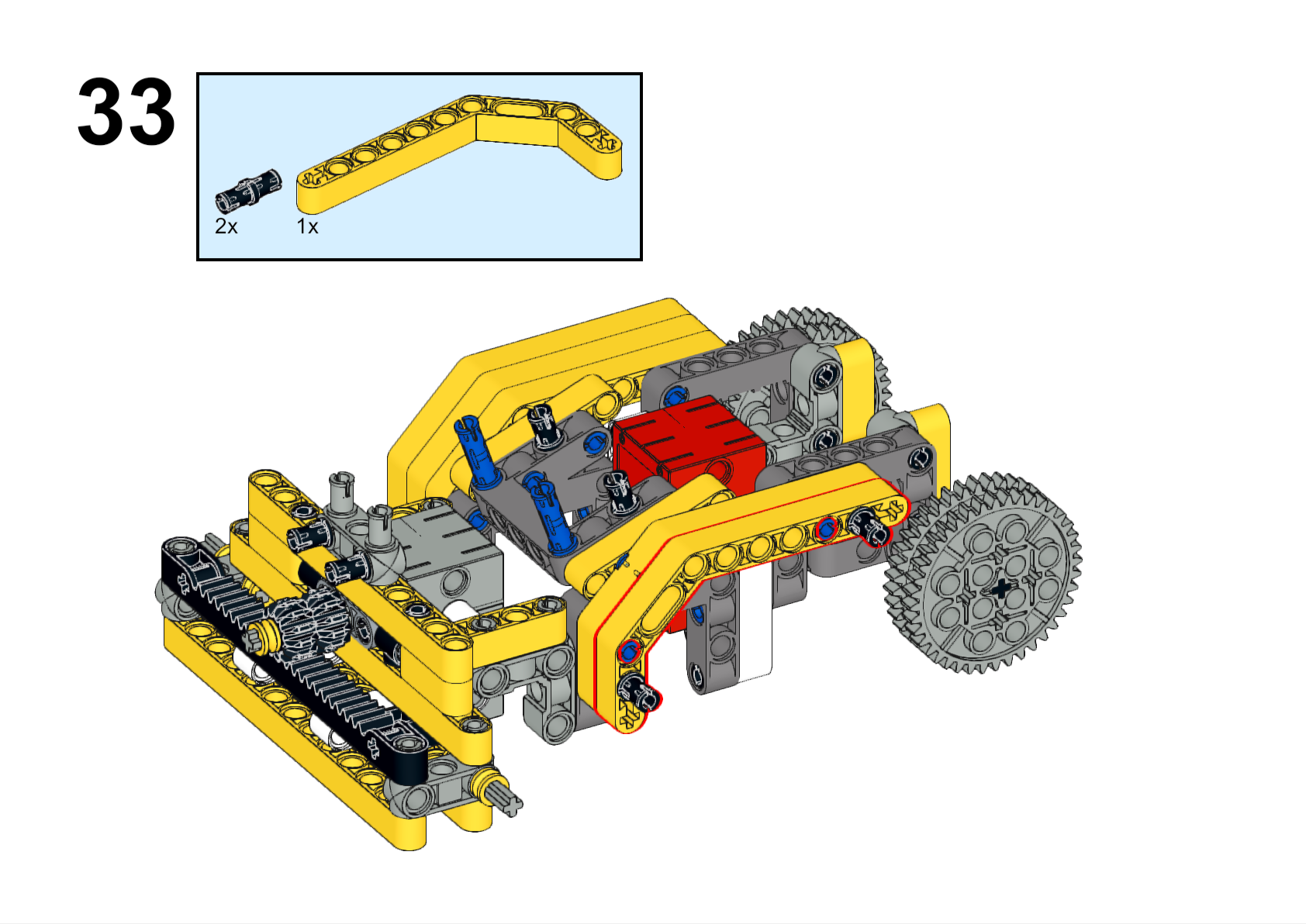
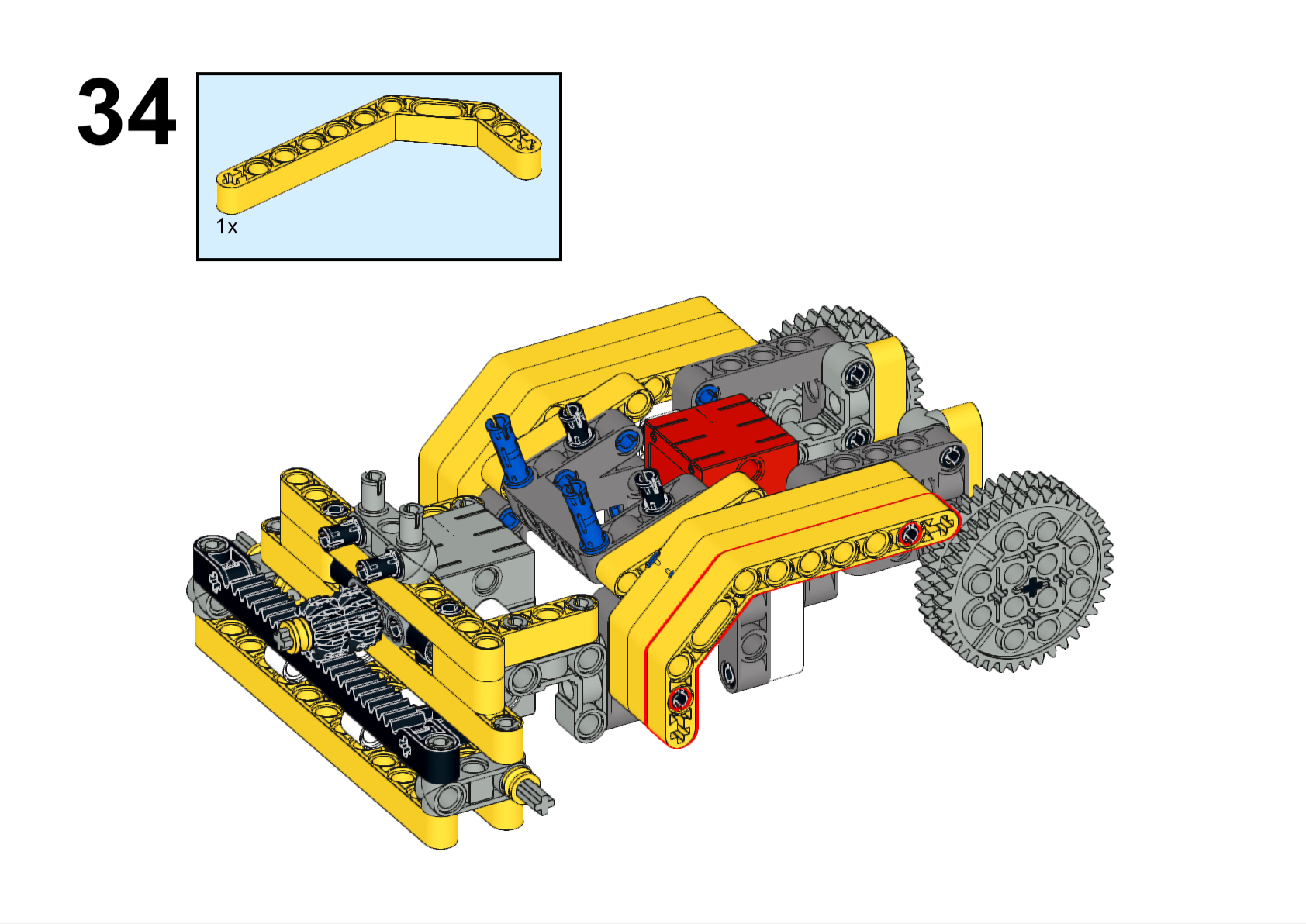
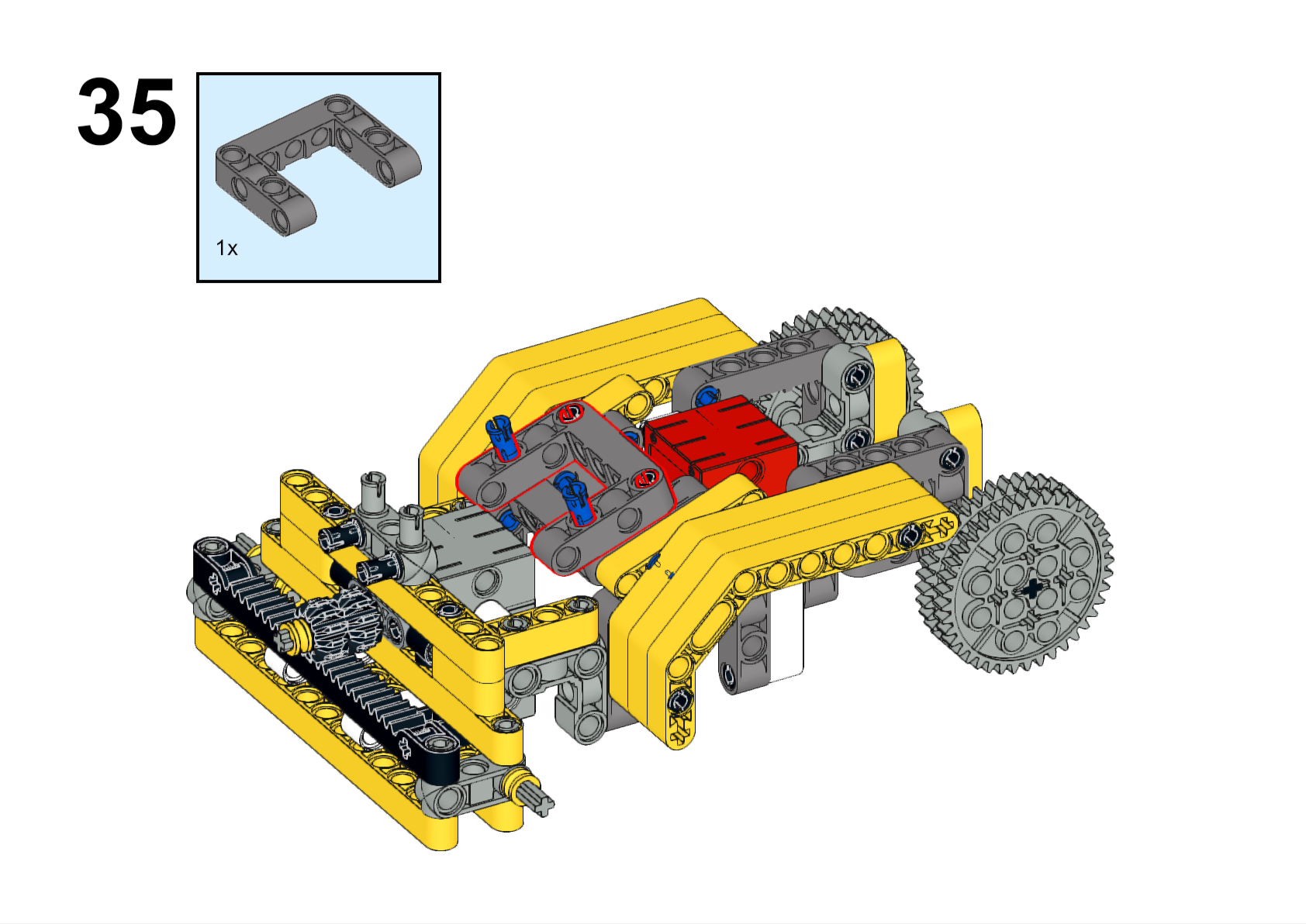
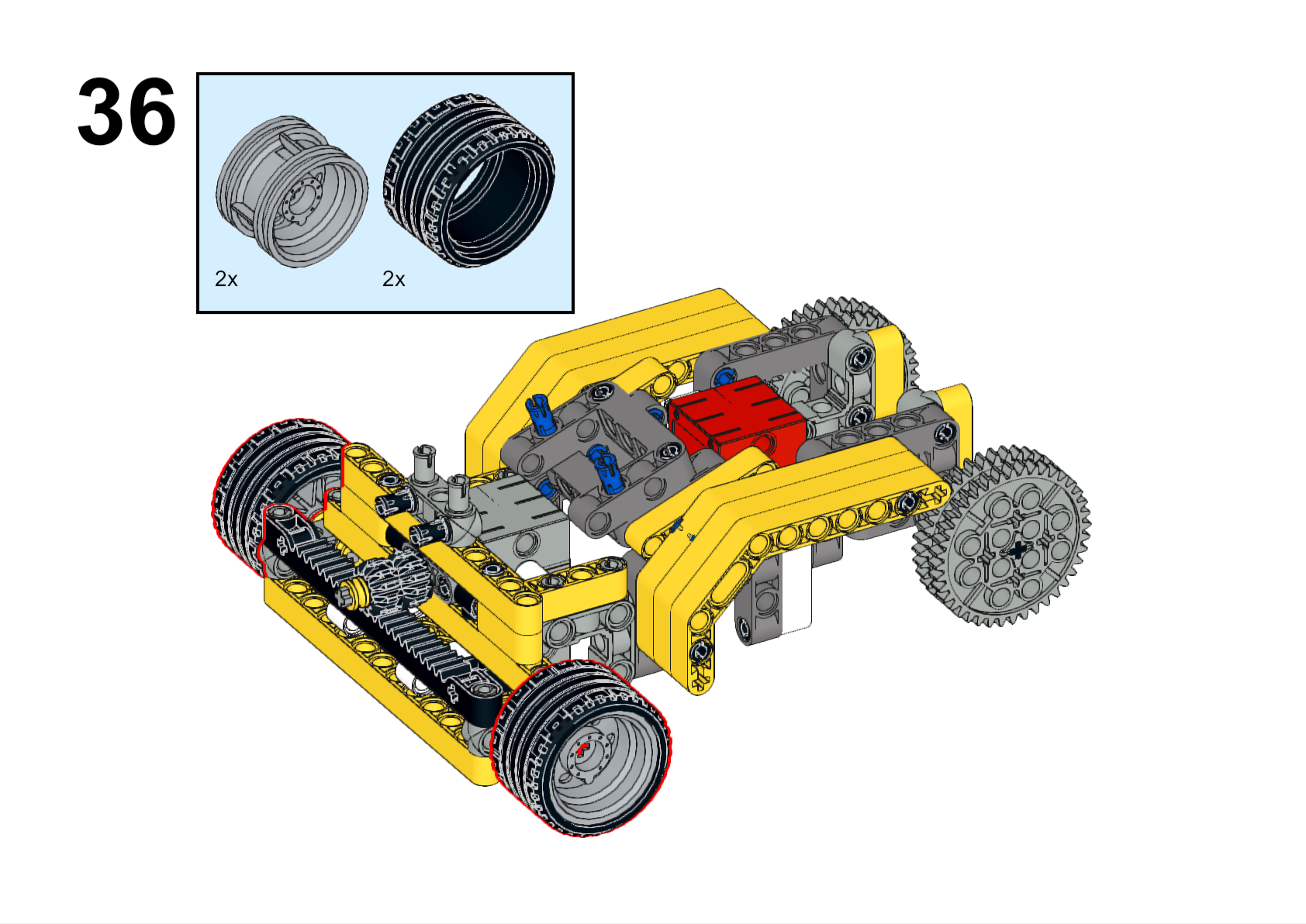
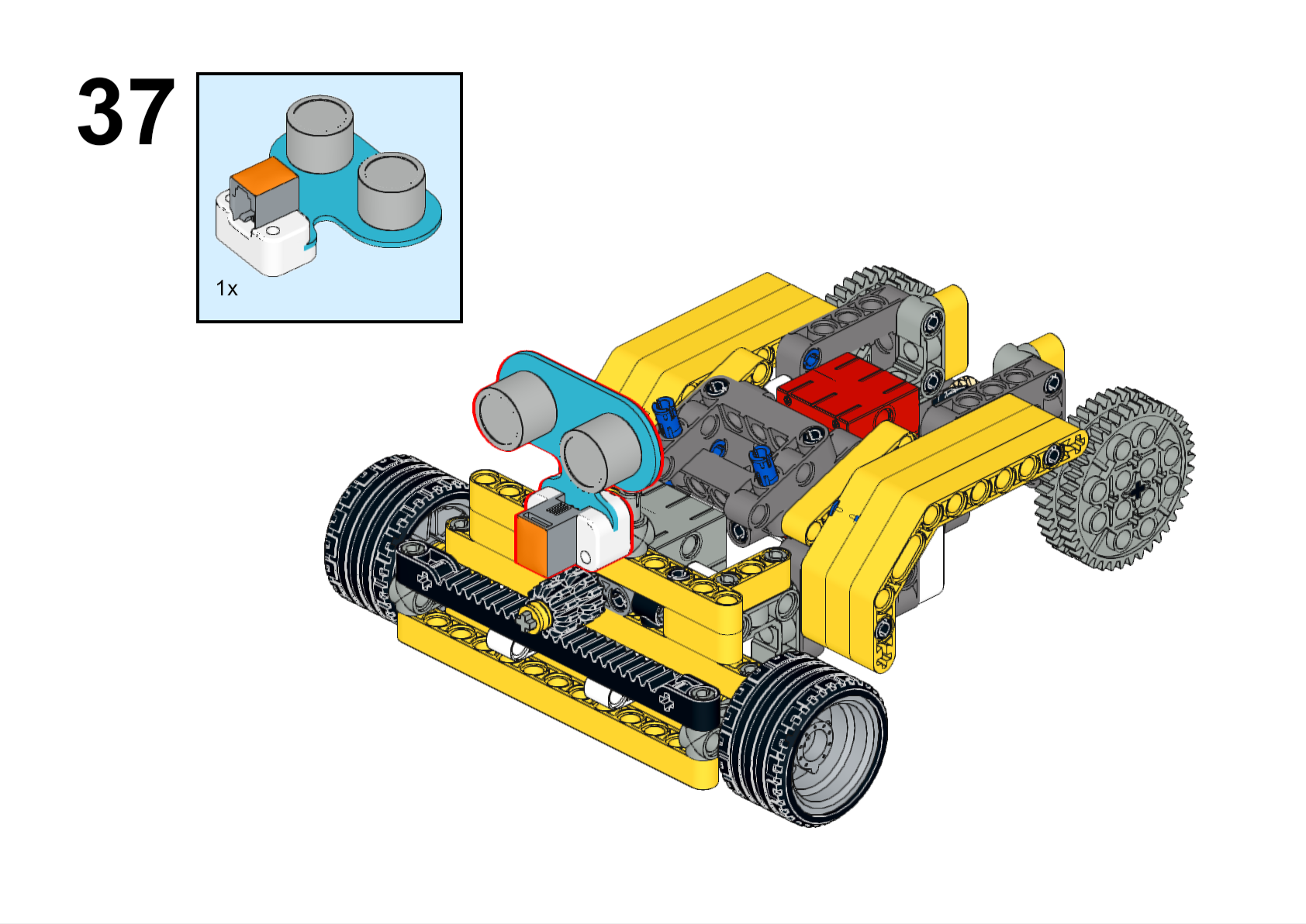
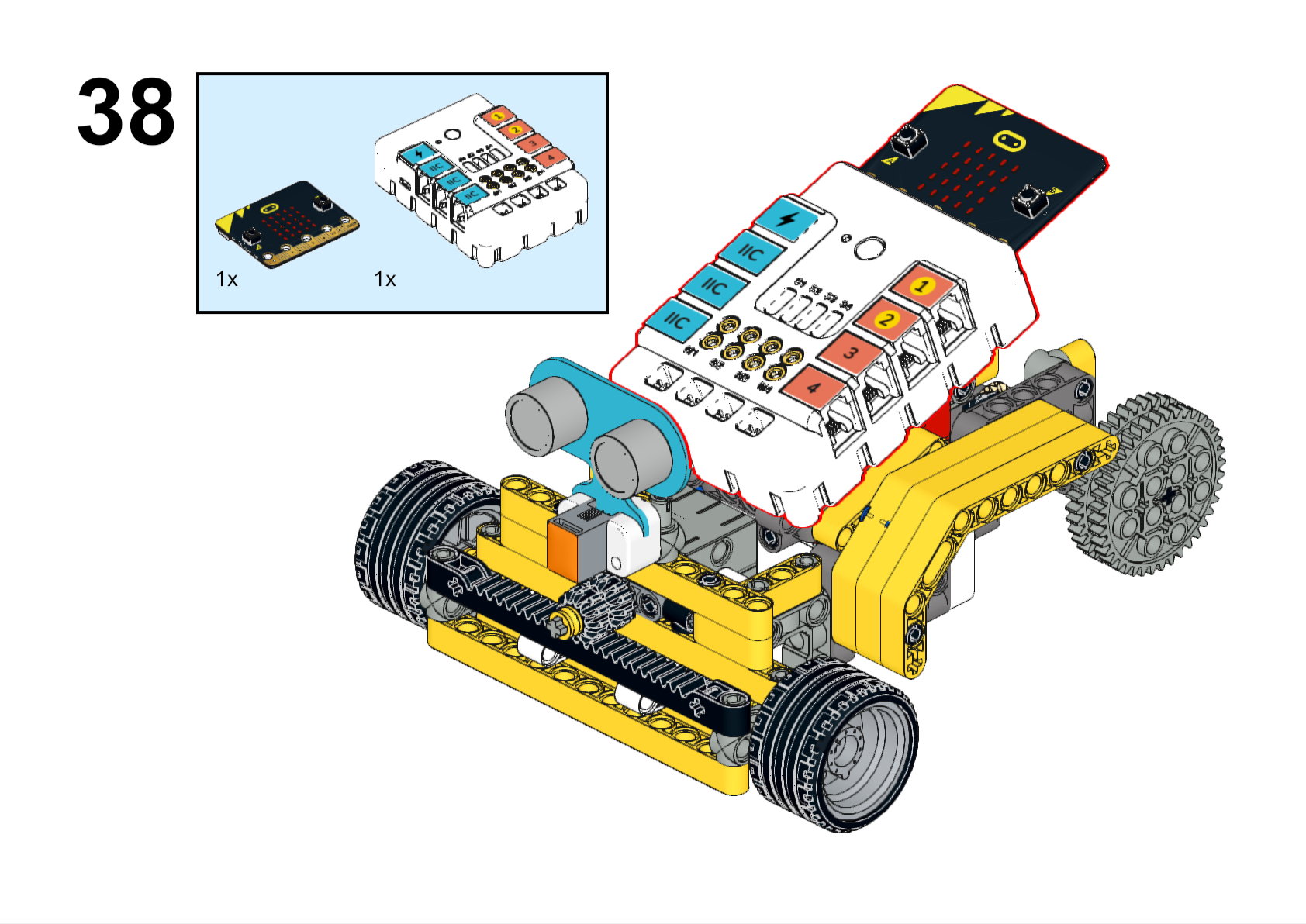
搭建完成
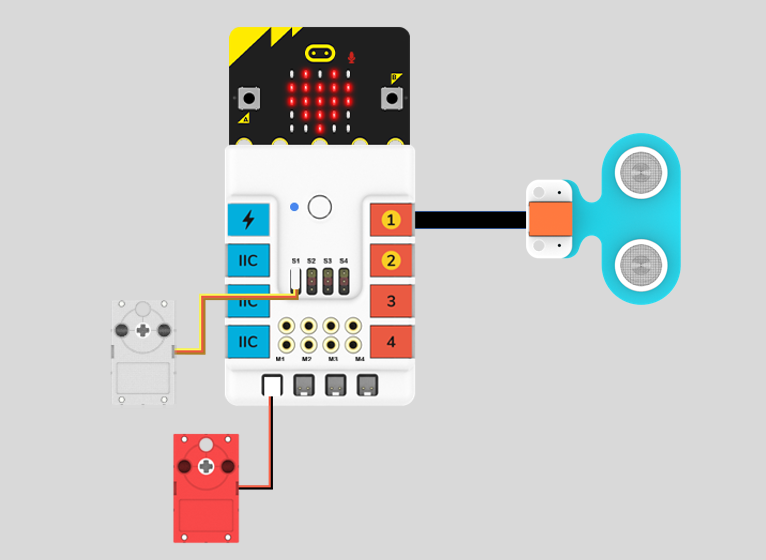
硬件连接
将超声波传感器连接到哪吒扩展板的J1接口,电机连接到哪吒扩展板的M1接口,舵机连接到哪吒扩展板的S1接口。
软件编程
打开编程平台makecode
新建项目
点击扩展
在搜索栏搜索PlanetX添加行星系列传感器的扩展库
在搜索栏搜索nezha添加哪吒扩展板的扩展库
编写程序
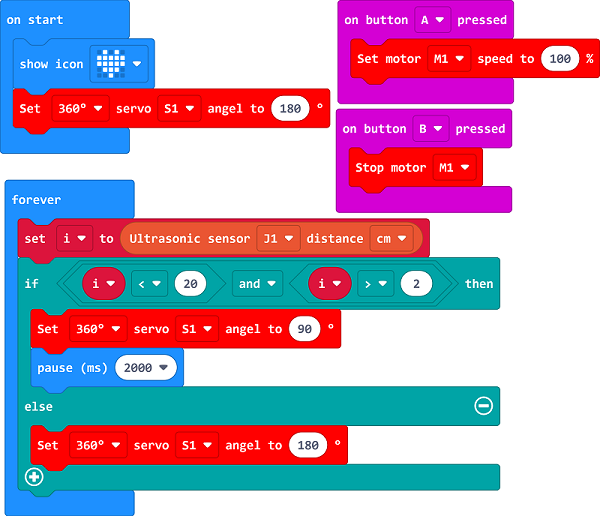
程序链接:https://makecode.microbit.org/_3TU8LhT3KWW6
你也可以通过以下网页直接下载程序。
展示
分组展示,学生对机器人进行测试、调试和优化,提高避障的准确性和稳定性,比较各组的成果和效果。
示例案例效果
当有障碍物阻挡在小车面前,小车会转向行驶。
反思
分组分享,让每组的学生分享自己的制作过程和心得,总结自己遇到的问题和解决办法,评价自己的优点和不足。