Case 08 行走机器人
简介
行走是动物世界中最基本、常见的运动方式之一。我们可以观察到许多动物如人类、猫、狗等都有各自独特的行走方式。它们通过协调地移动四肢,调整身体的平衡,才能实现稳定的行走动作。不同的动物有着不同的步态和姿势,展现出各自的特点和灵活性。
在本项目中,我们将尝试模仿动物的行走动作,设计和制作一个能够模拟它们步伐的机器人。通过哪吒发明家套装V2中的材料,我们将搭建机器人的结构,并通过一个电机控制机器人的运动。同时,我们将学习和应用齿轮传动的原理,以实现机器人的协调运动和行走动作。

教学目标
- 理解电机的工作原理和控制方法。
- 掌握齿轮传动的基本原理和应用。
- 学会使用哪吒发明家套装V2中的材料搭建行走机器人的基本结构。
- 了解重心对机器人稳定性的影响,并学习如何调整重心来保持机器人的平衡。
- 培养创造力、问题解决能力和团队合作精神。
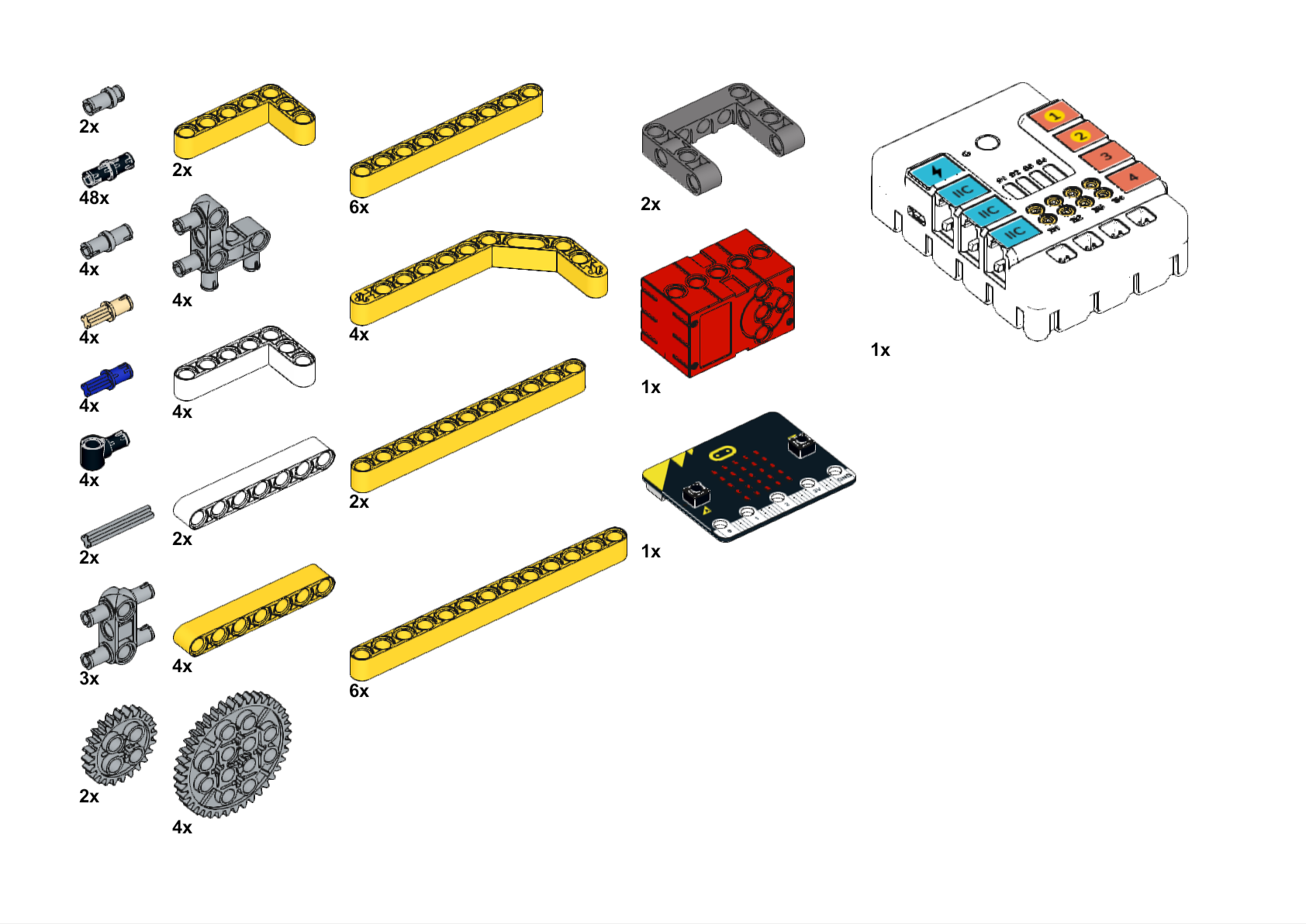
教学准备
教学过程
引入
向学生介绍行走机器人制作的背景和目标,激发学生的兴趣和好奇心。
行走是动物世界中最基本、常见的运动方式之一。我们可以观察到许多动物如人类、猫、狗等都有各自独特的行走方式。它们通过协调地移动四肢,调整身体的平衡,才能实现稳定的行走动作。不同的动物有着不同的步态和姿势,展现出各自的特点和灵活性。
在本项目中,我们将尝试模仿动物的行走动作,设计和制作一个能够模拟它们步伐的机器人。通过哪吒发明家套装V2中的材料,我们将搭建机器人的结构,并通过一个电机控制机器人的运动。同时,我们将学习和应用齿轮传动的原理,以实现机器人的协调运动和行走动作。
探究
分组讨论,让学生思考如何用积木材料来制作一个行走机器人,重点关注齿轮传动和重心对平衡的影响。
- 通过调整齿轮的传动比例,你们能否改变机器人的行走速度?
- 如何调整机器人的重心位置来保持机器人的平衡?
- 如果给机器人添加更多的齿轮传动,会对机器人的行走效果产生什么影响?
实践
分组动手,按照自己的设计方案,用积木材料来制作一个行走机器人。
按照自己的设计方案,用积木材料来制作一个行走机器人,看看谁的机器人走的更快。
示例
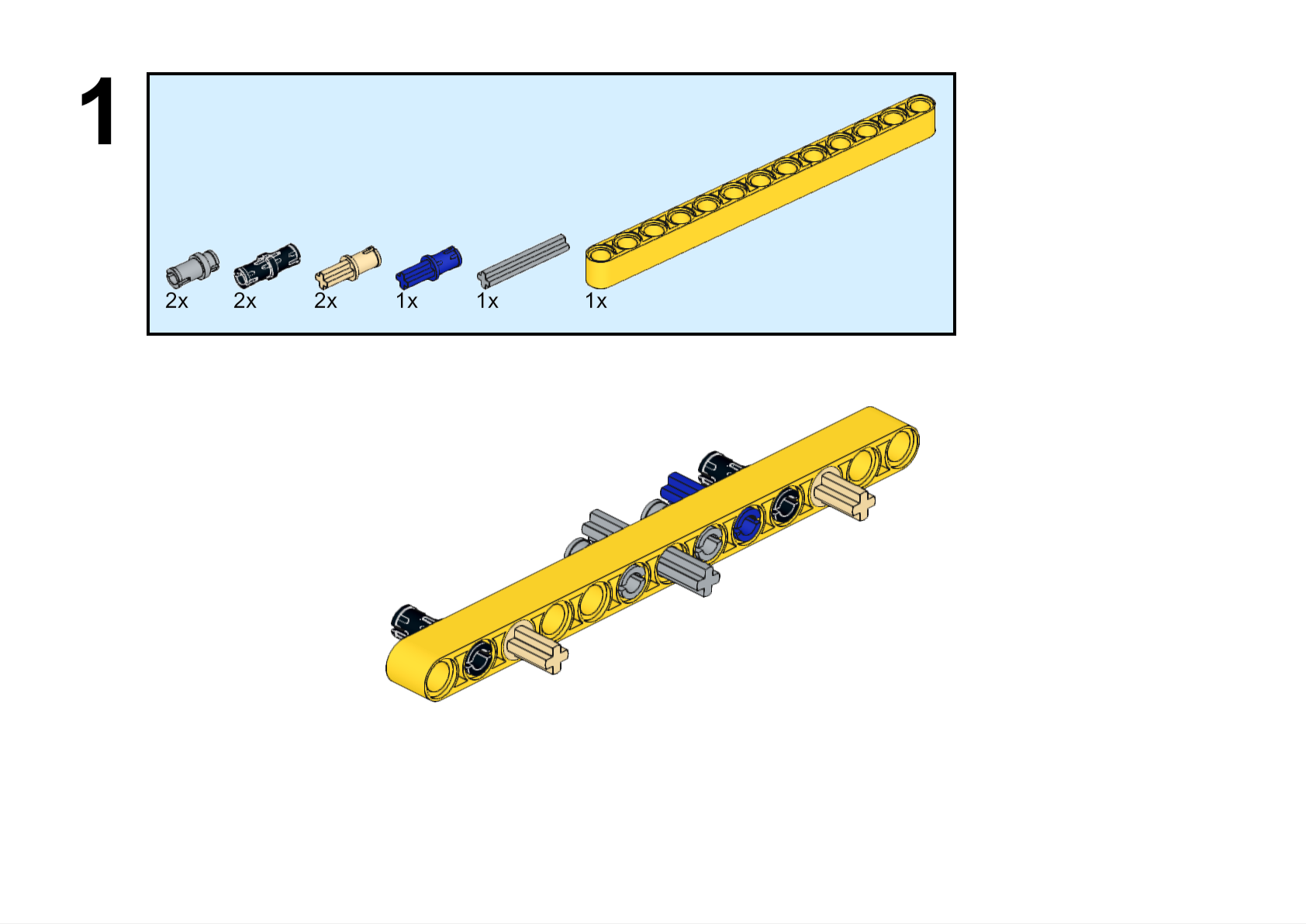
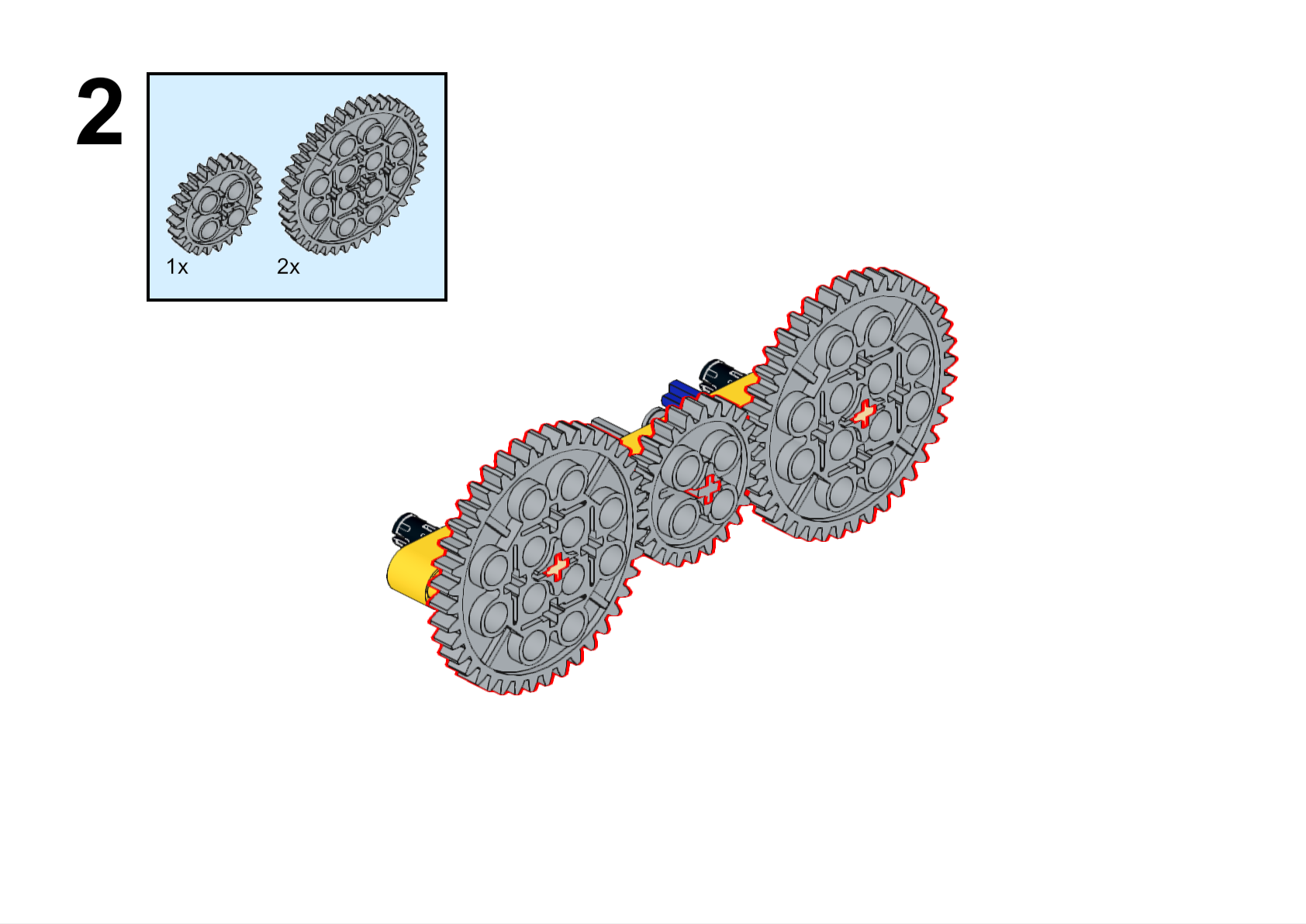
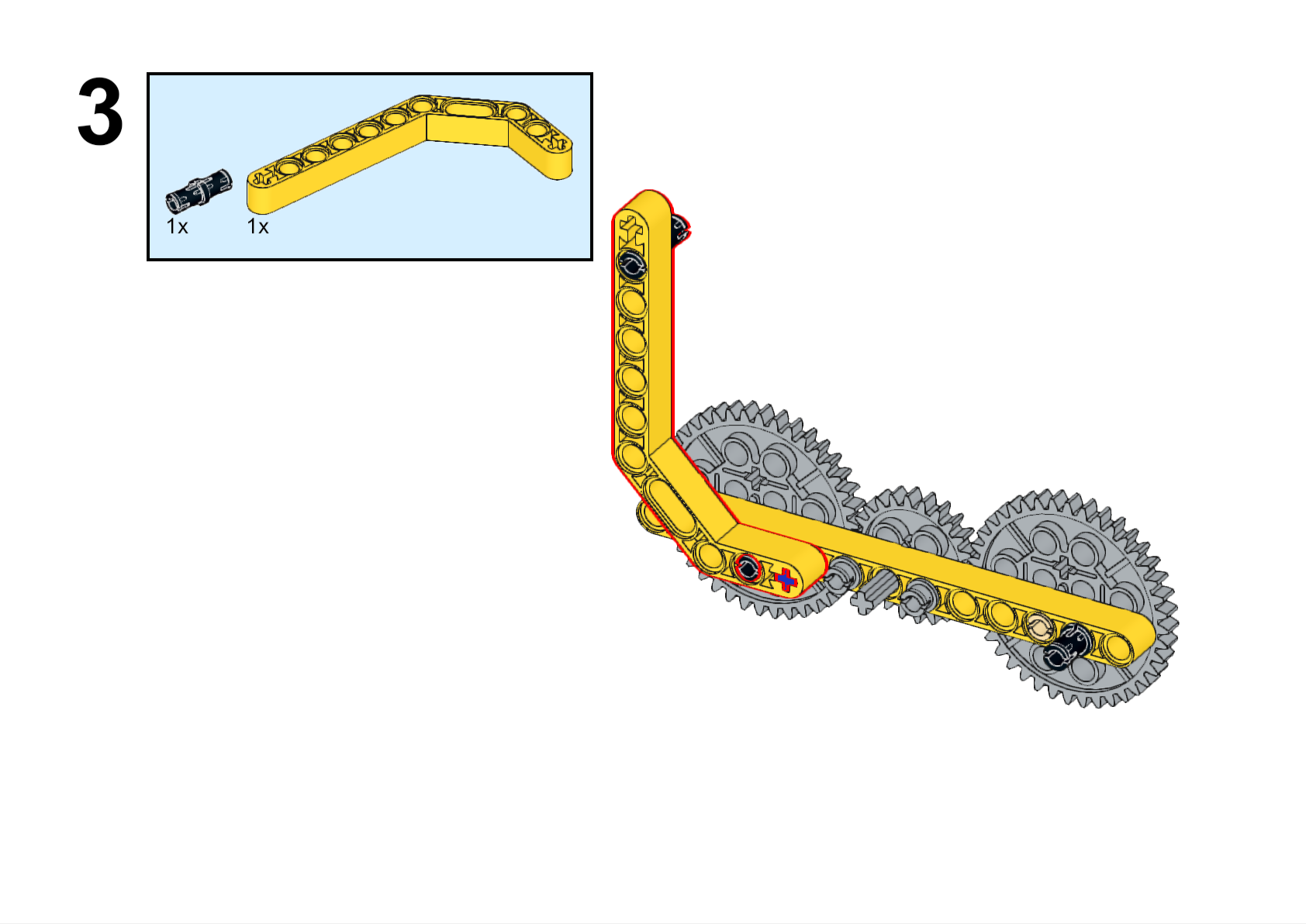
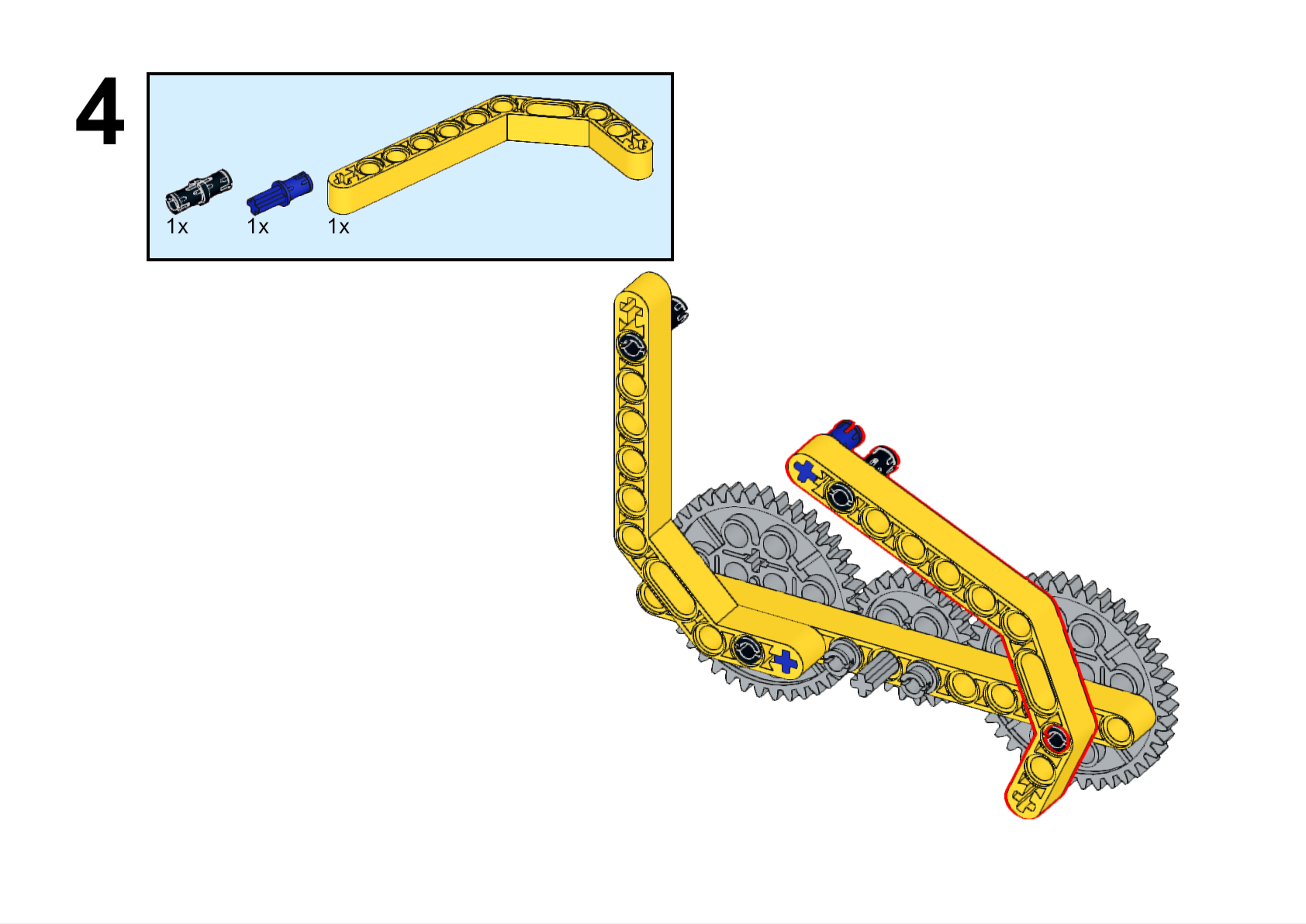
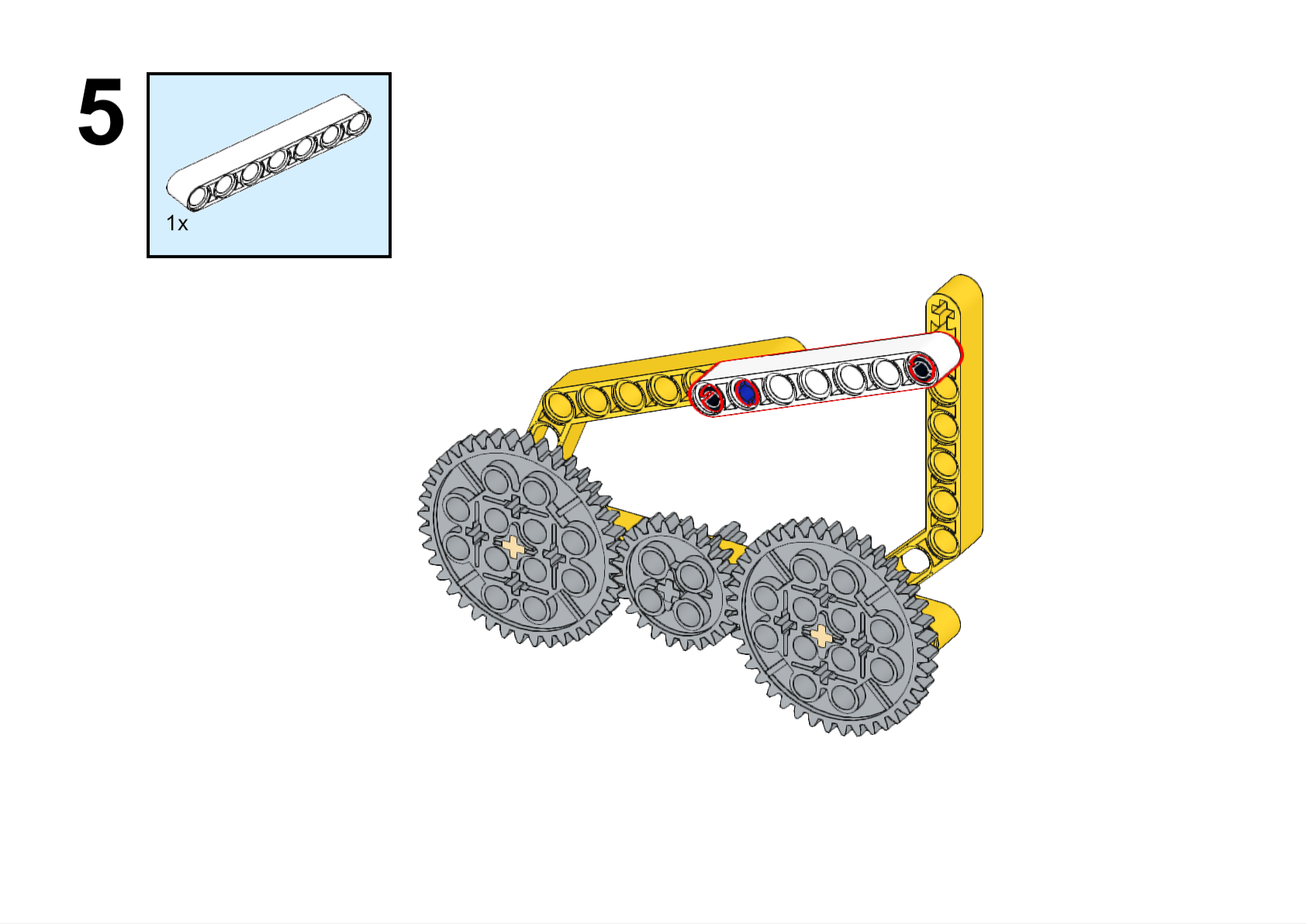
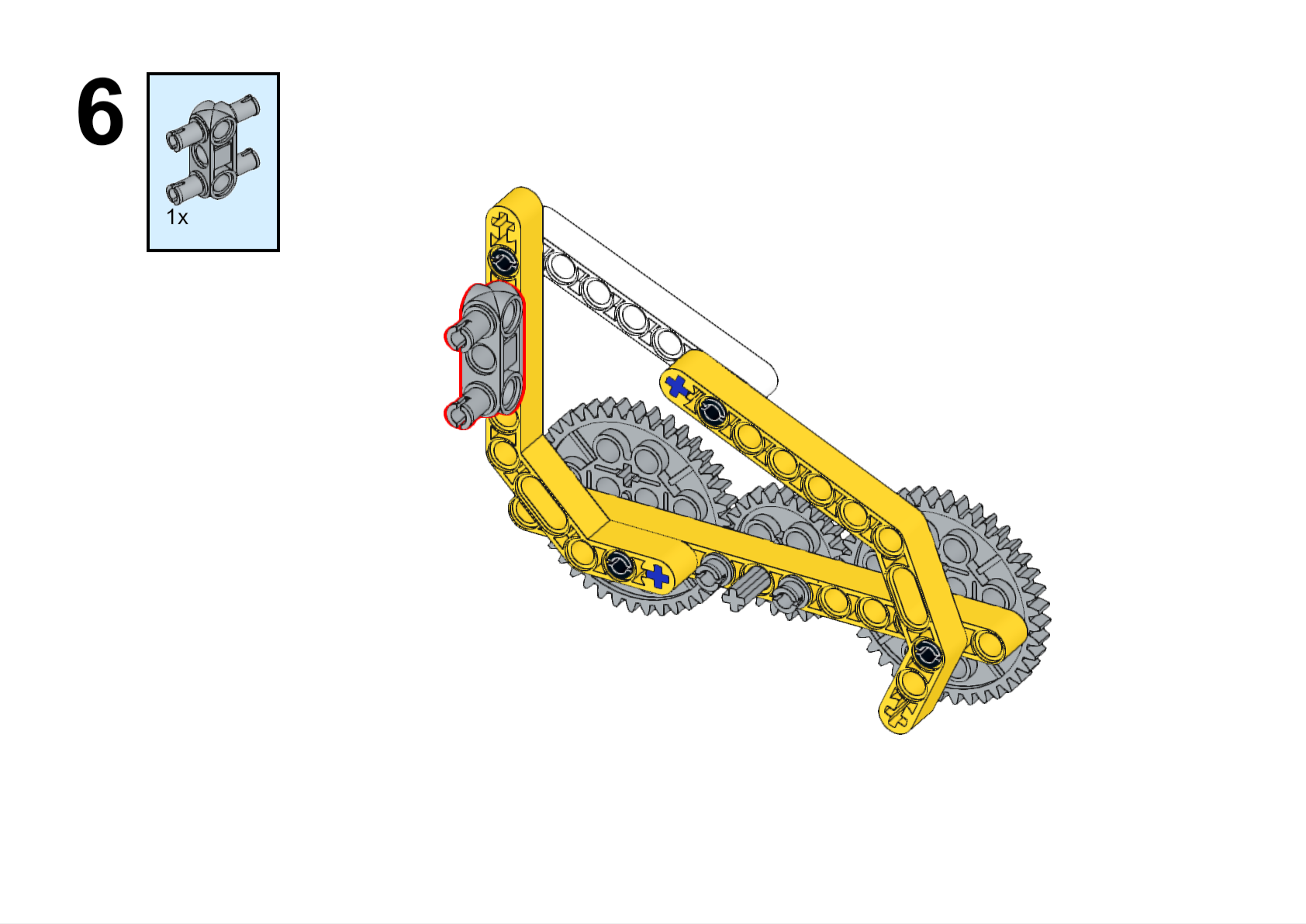
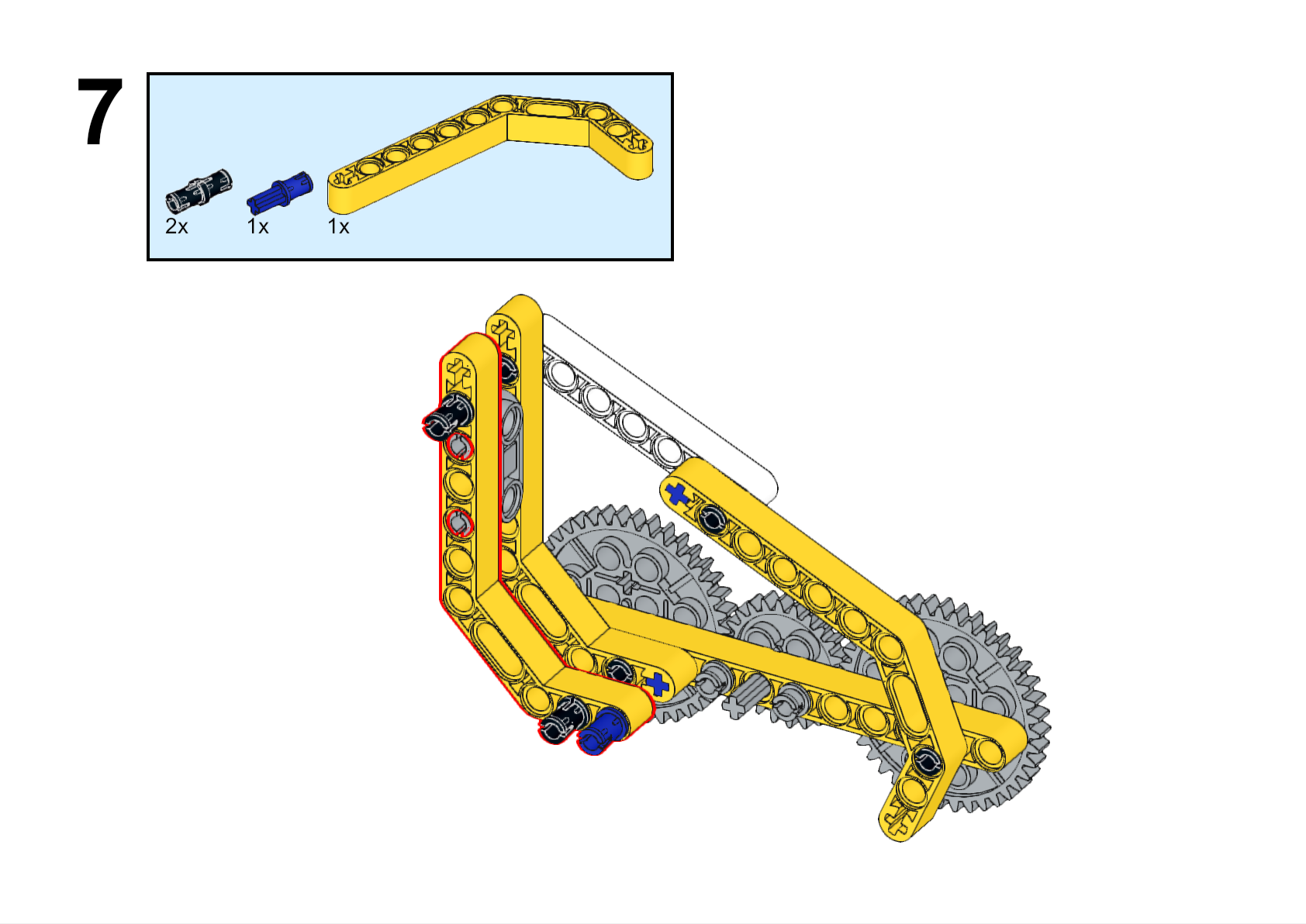
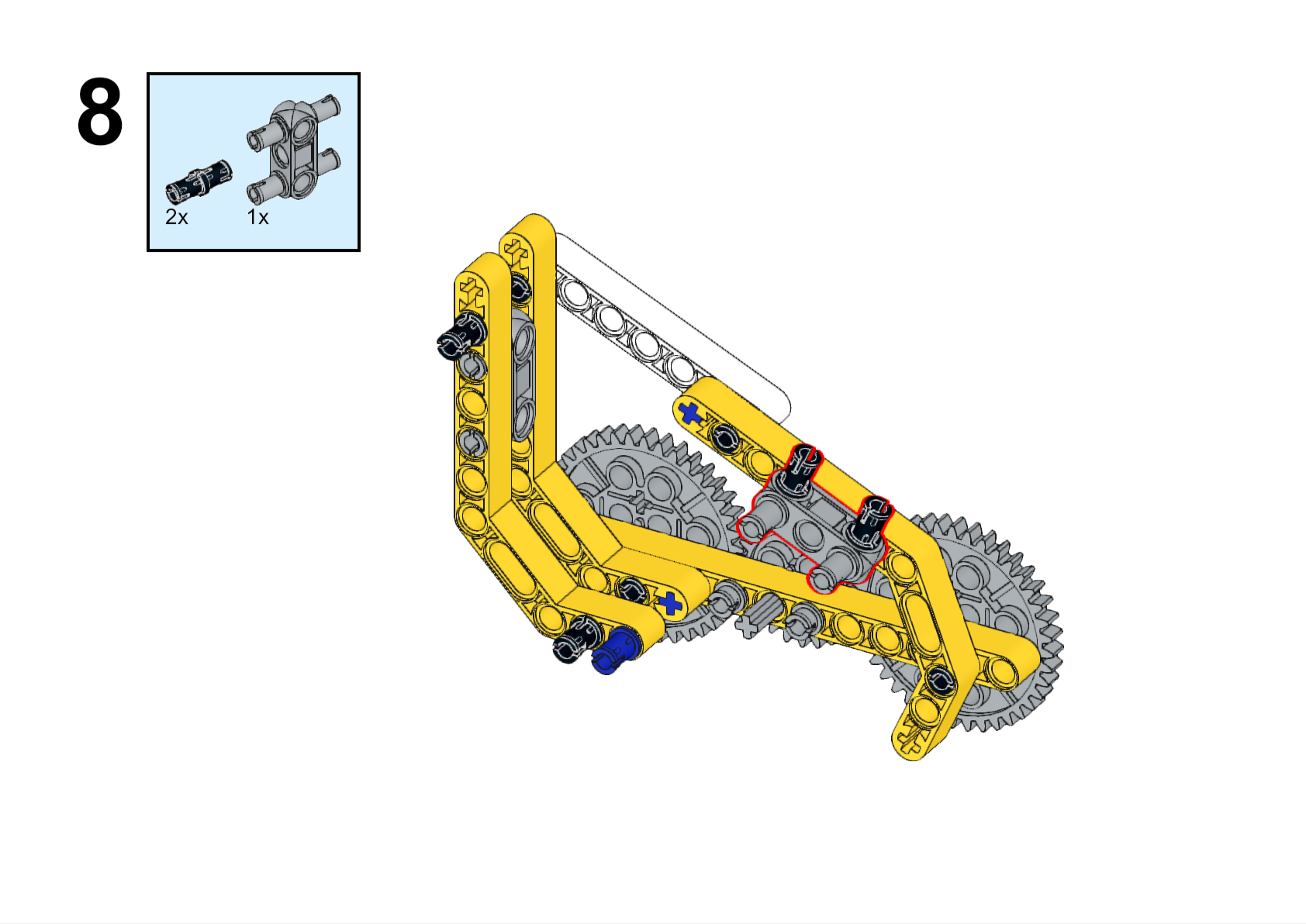
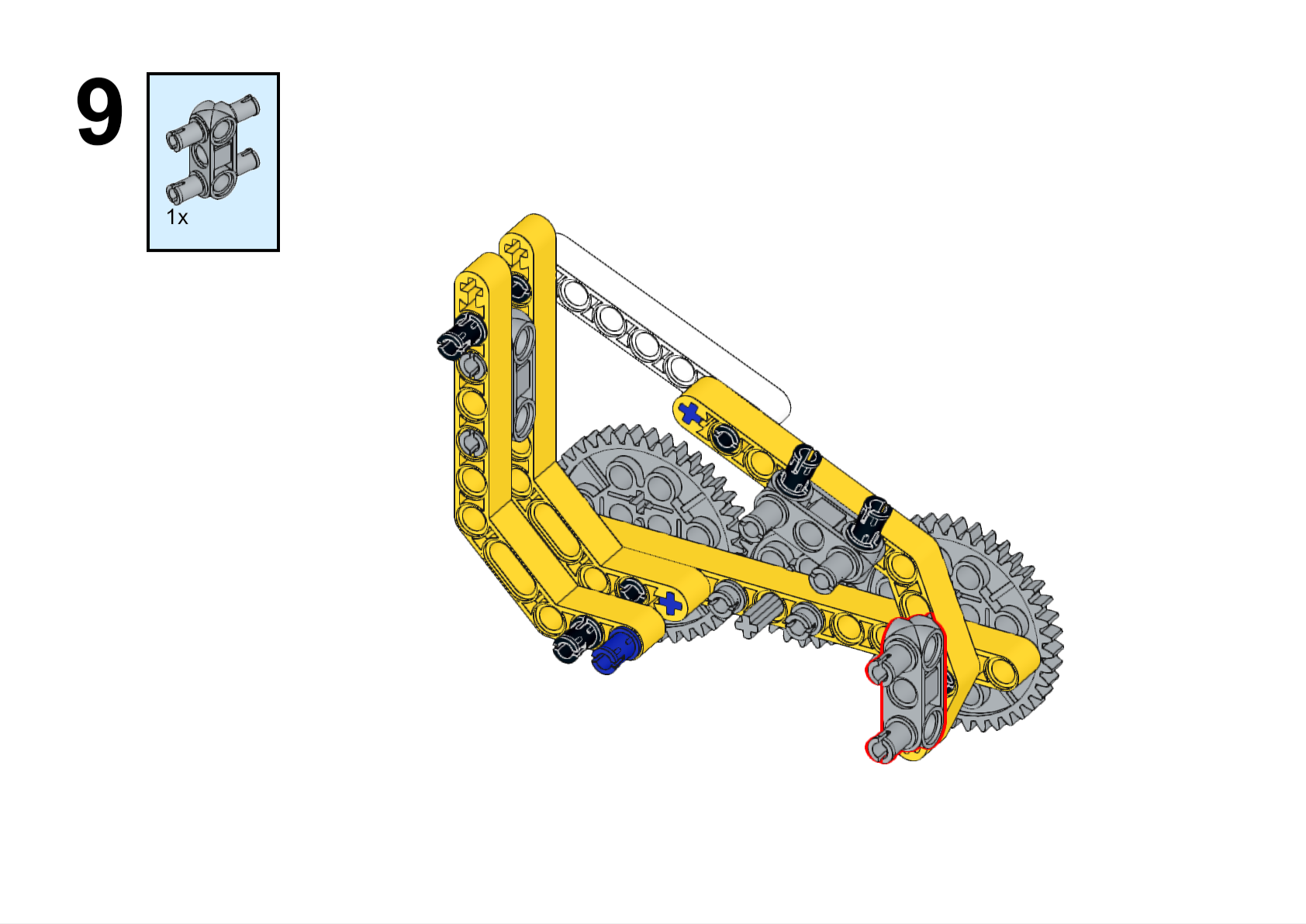
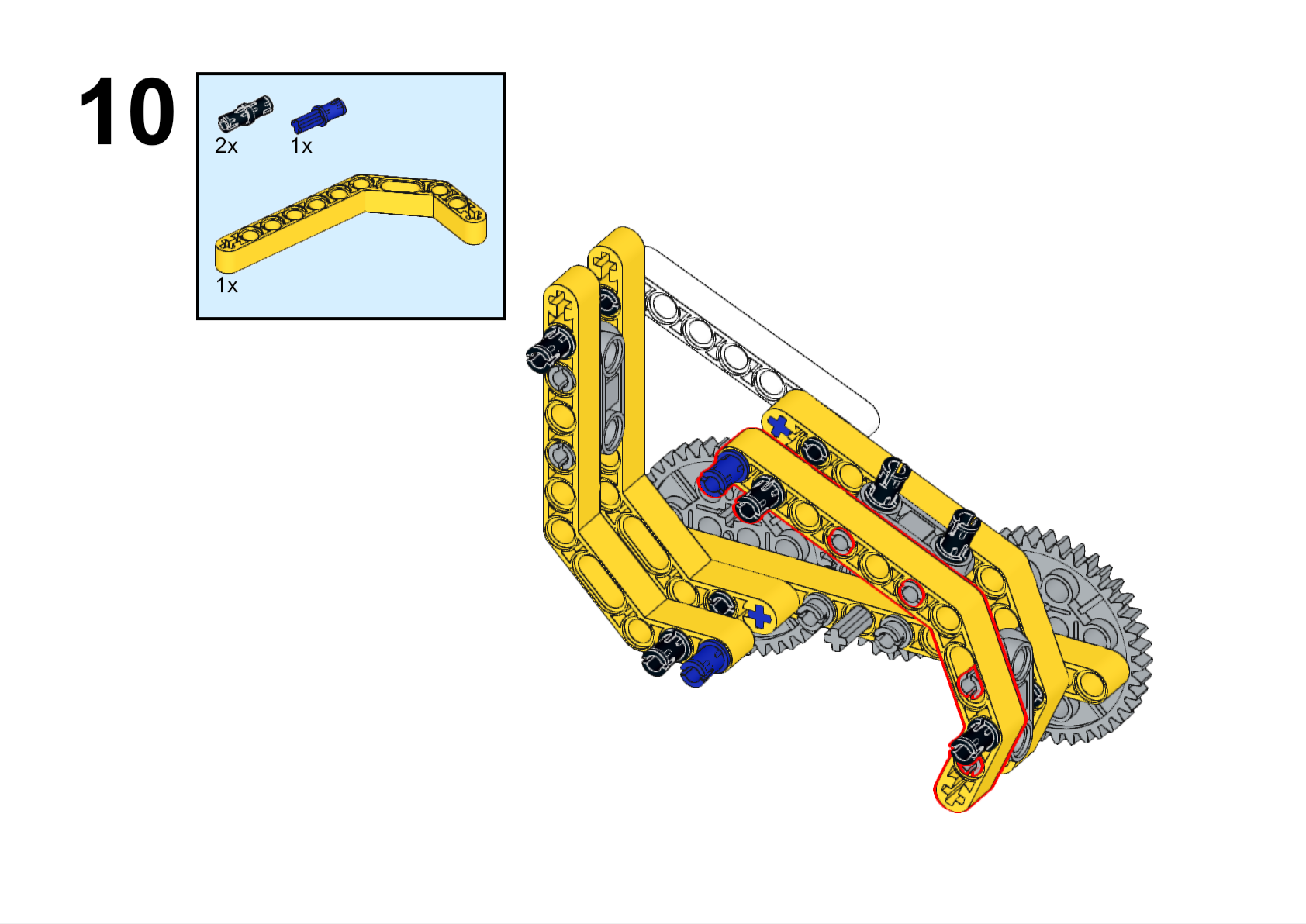
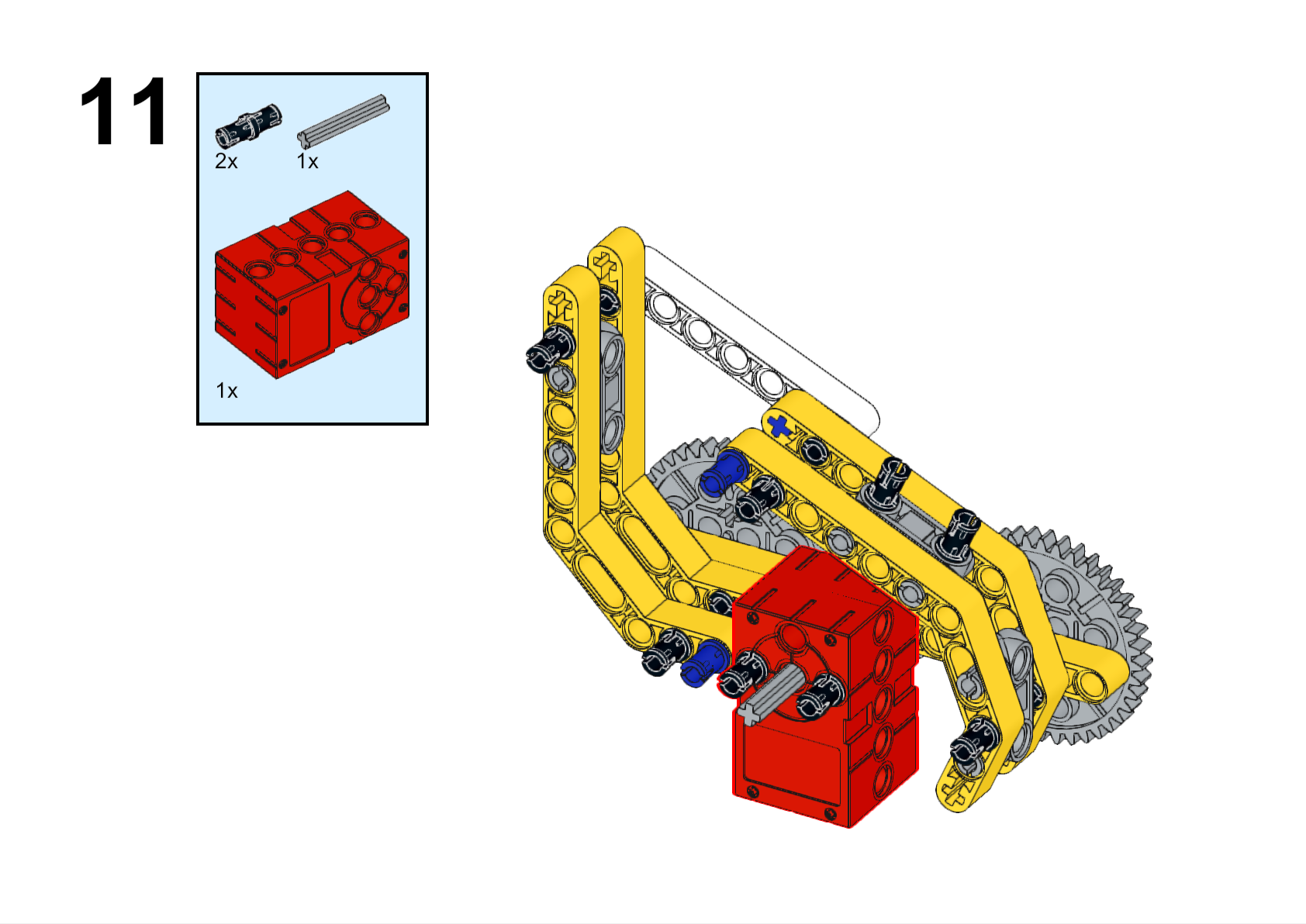
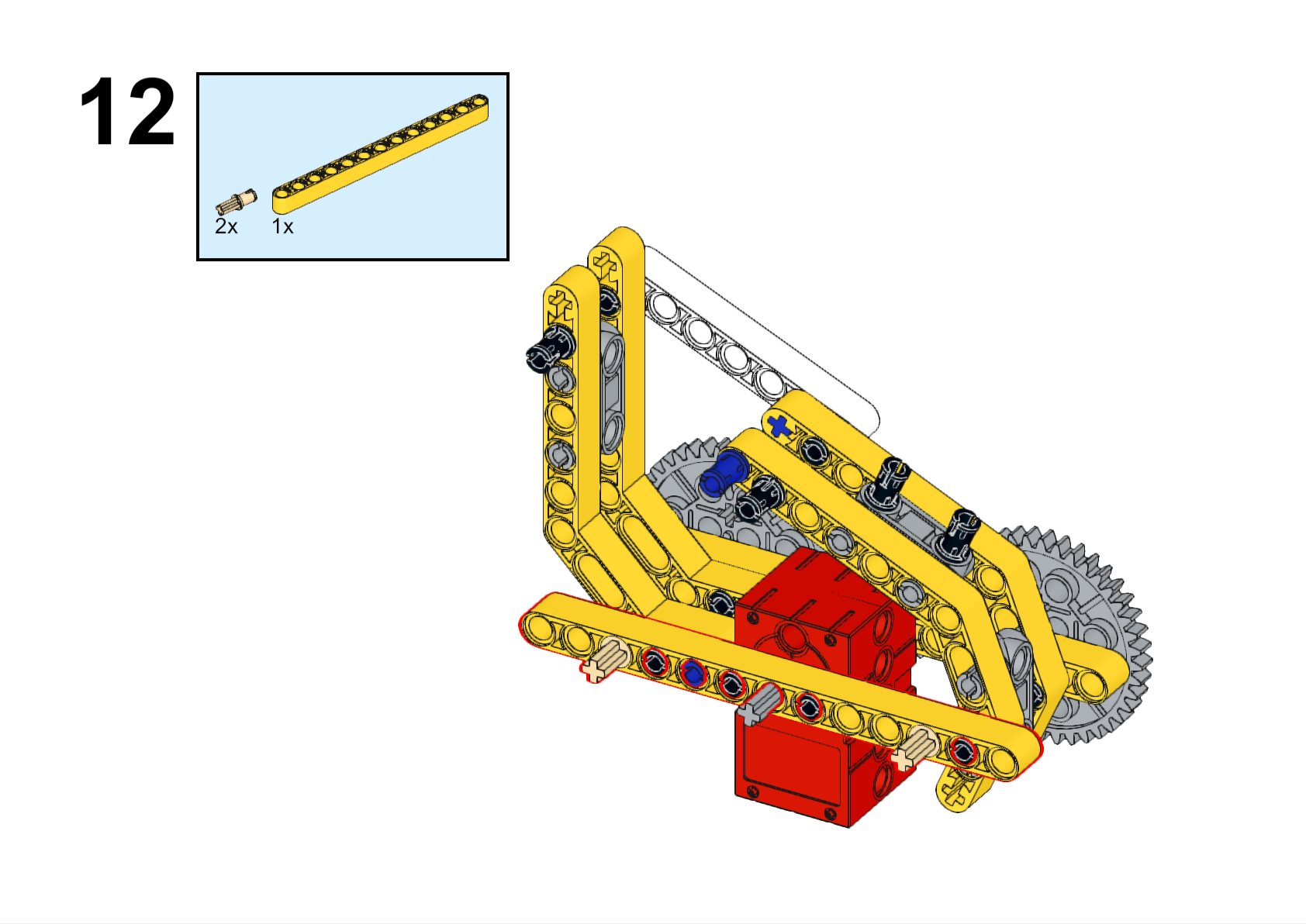
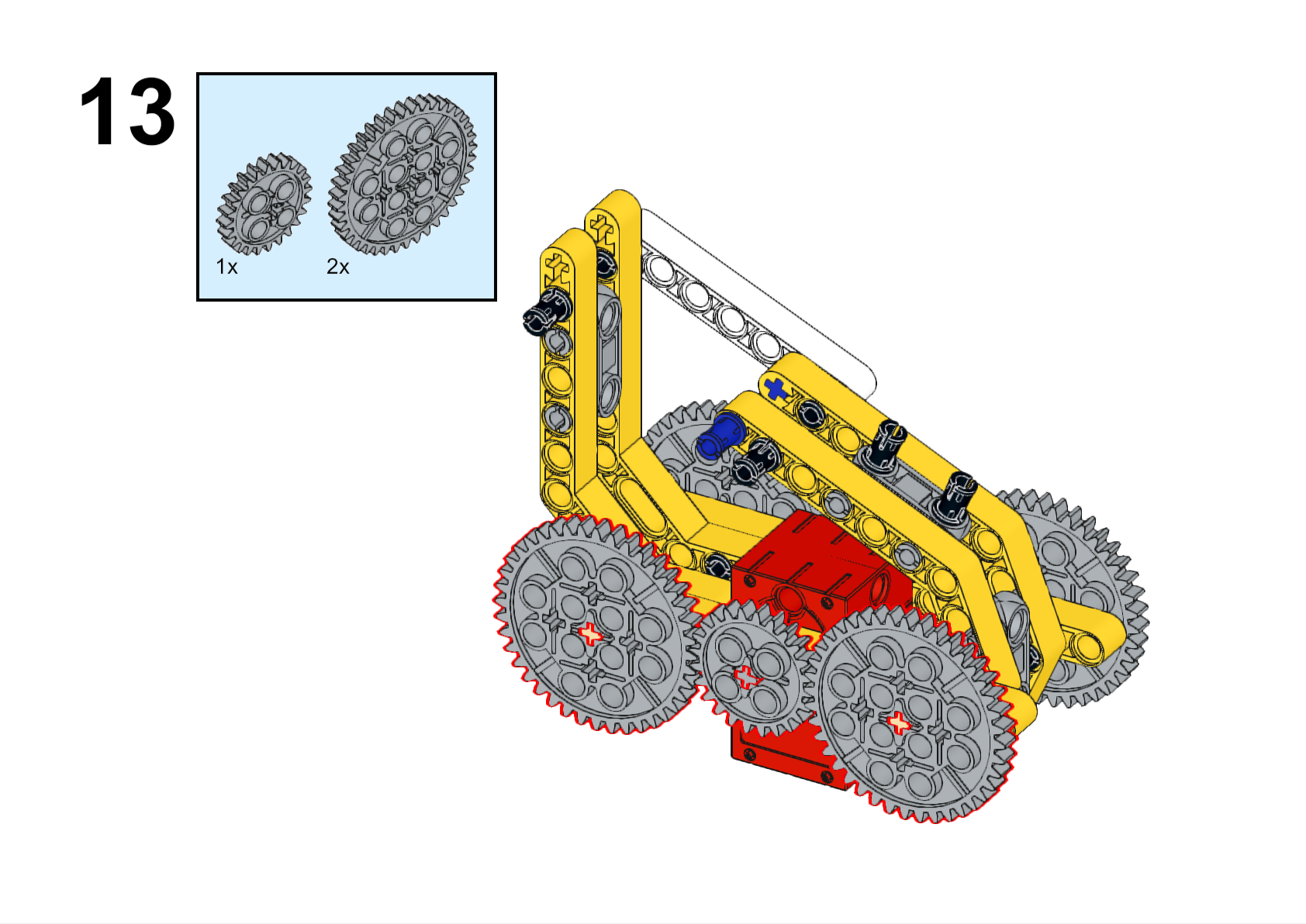
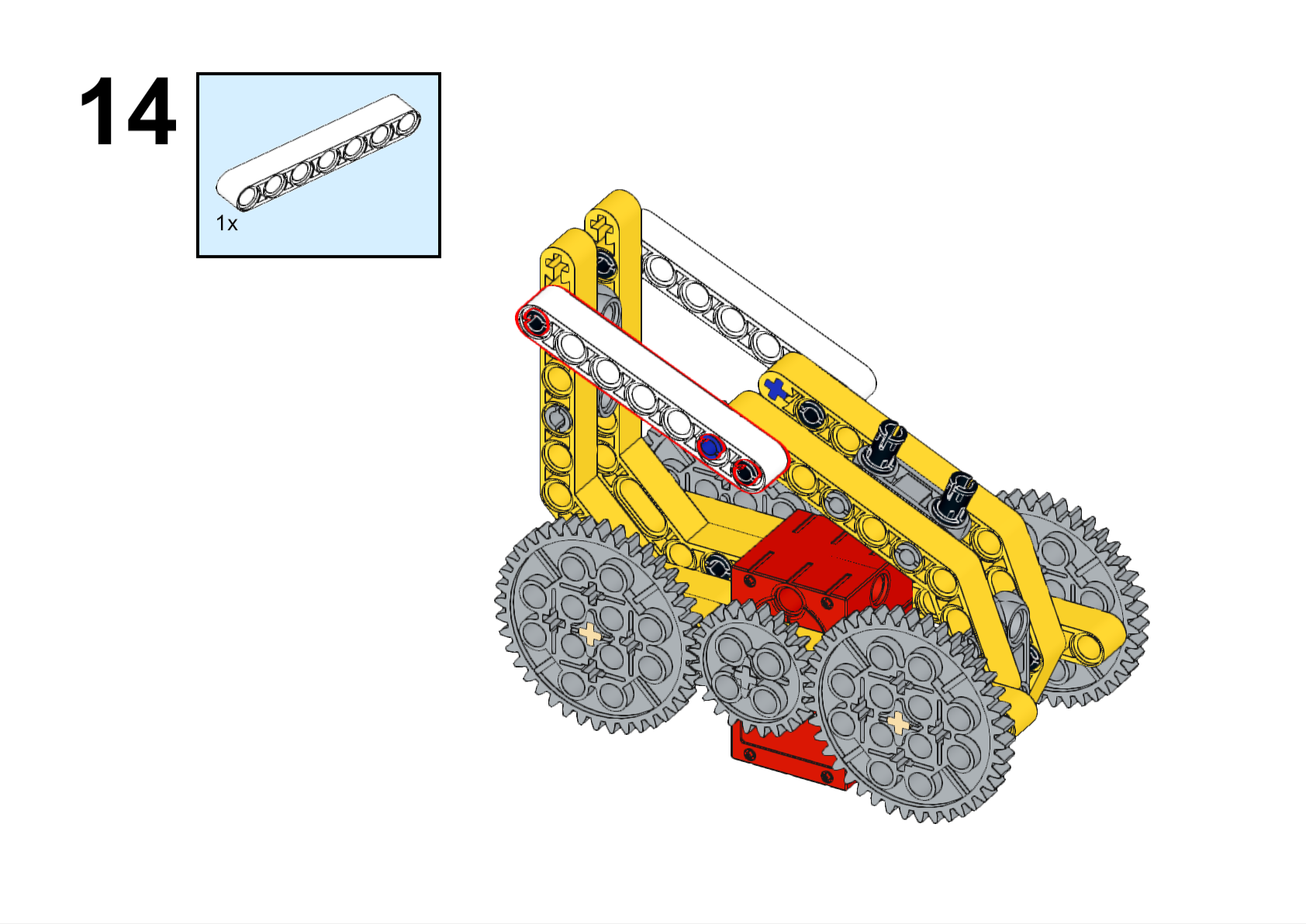
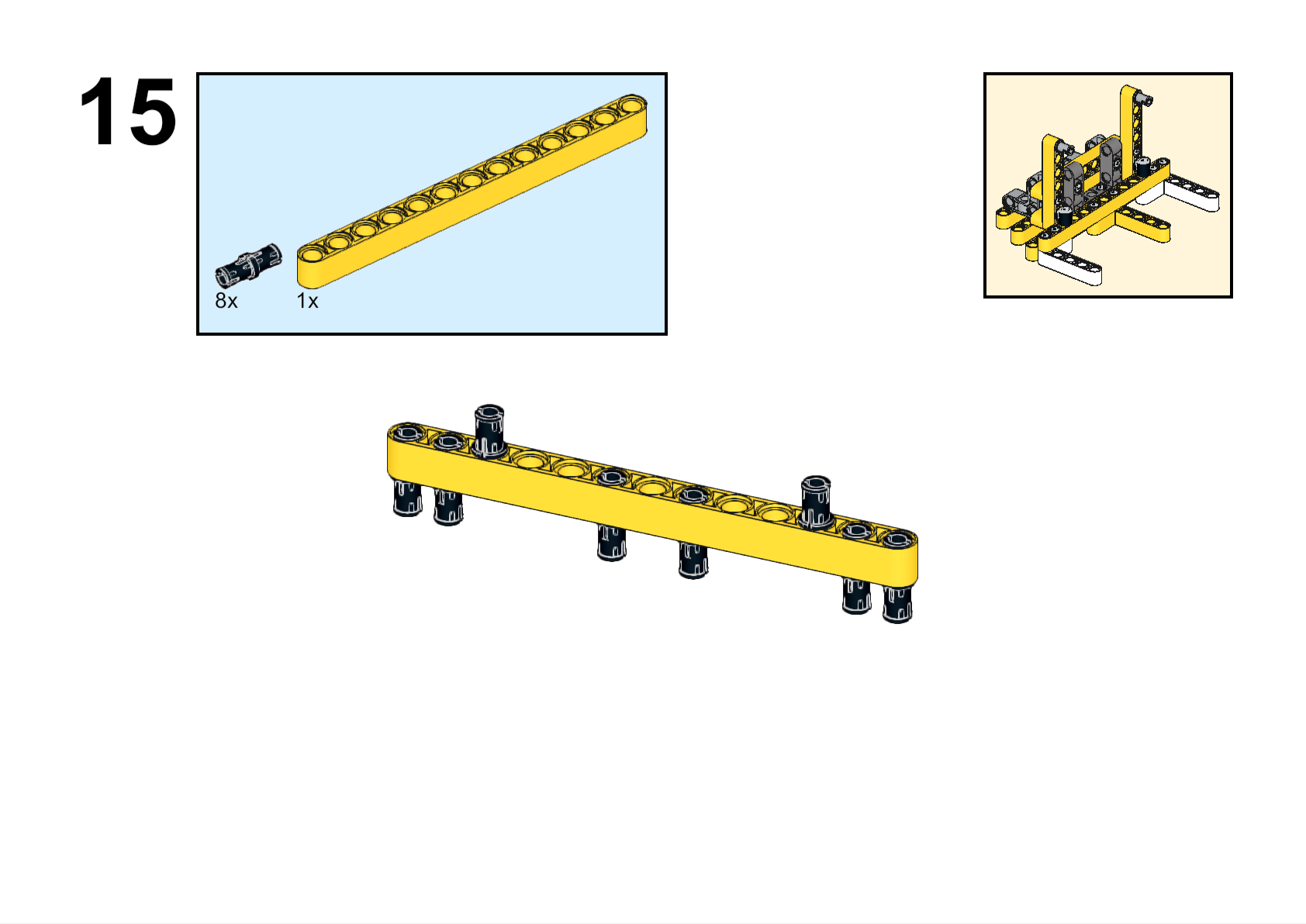
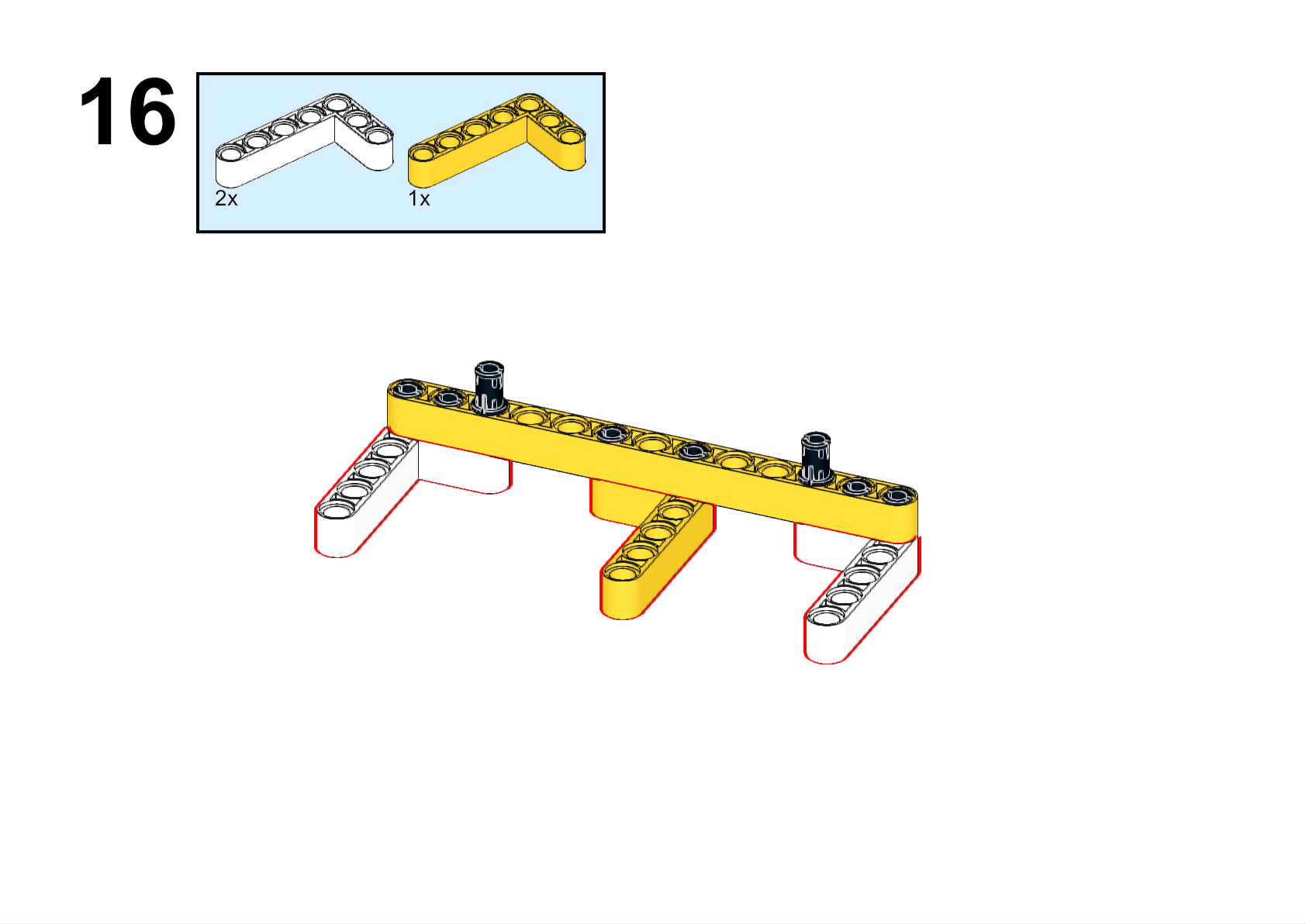
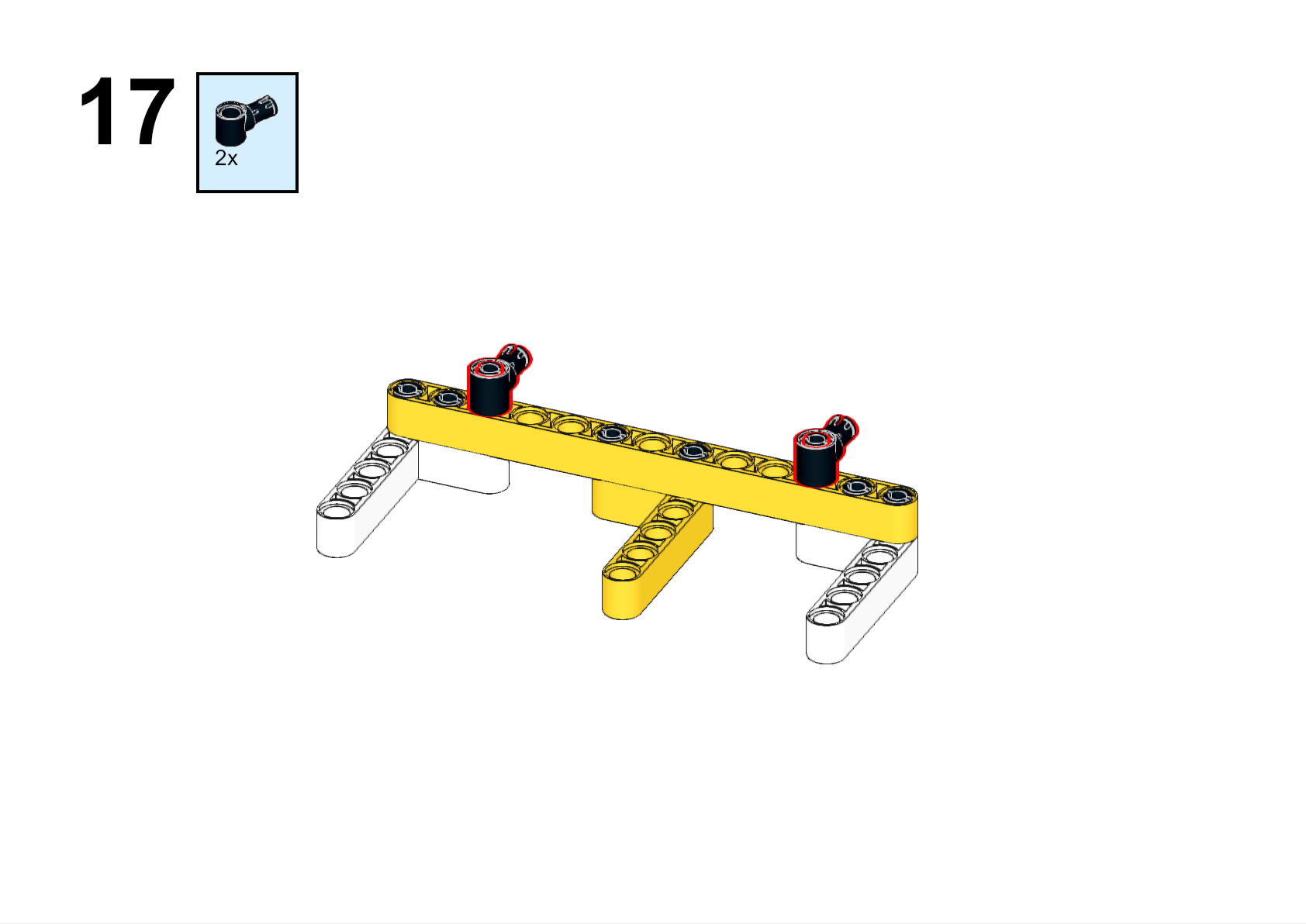
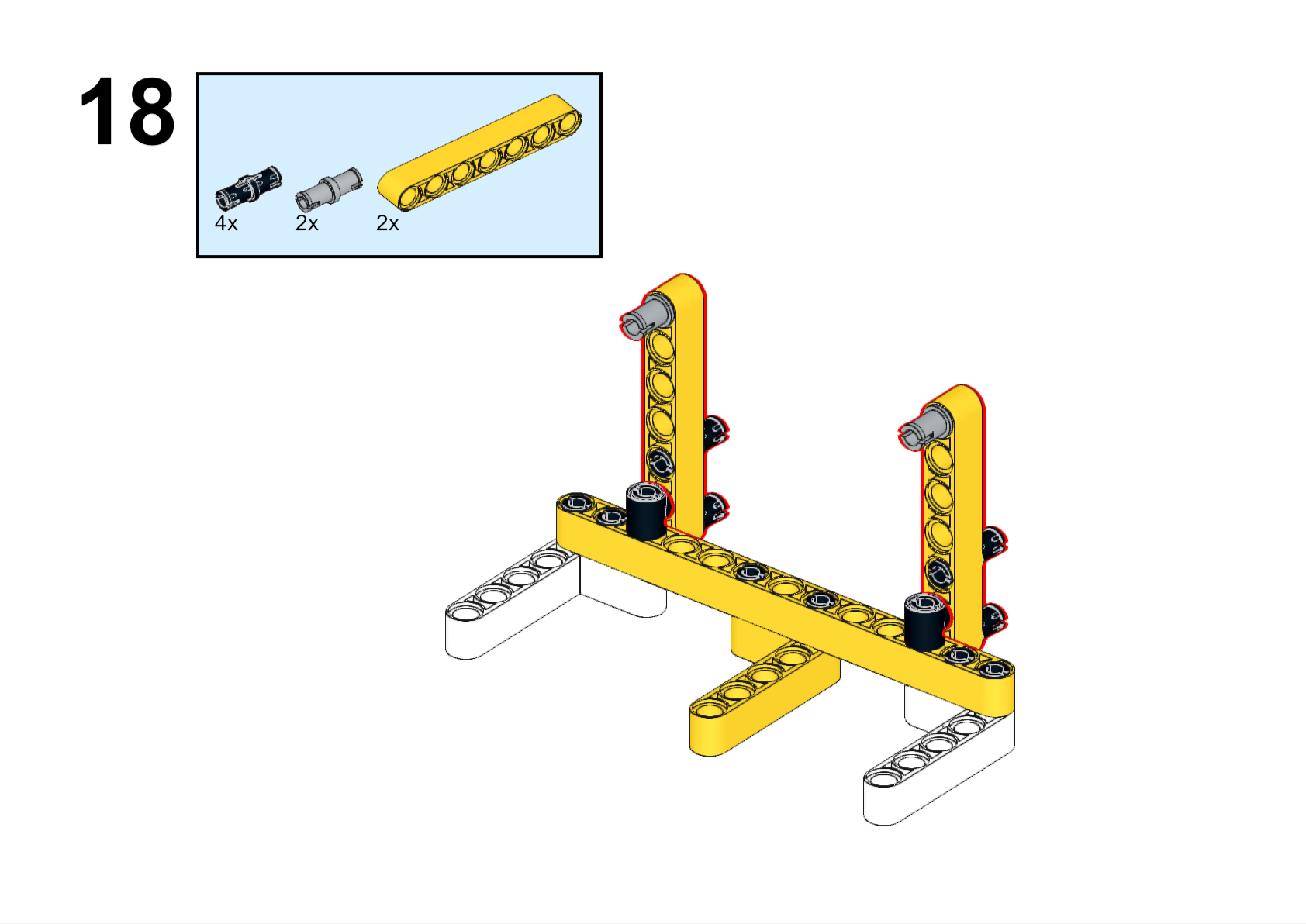
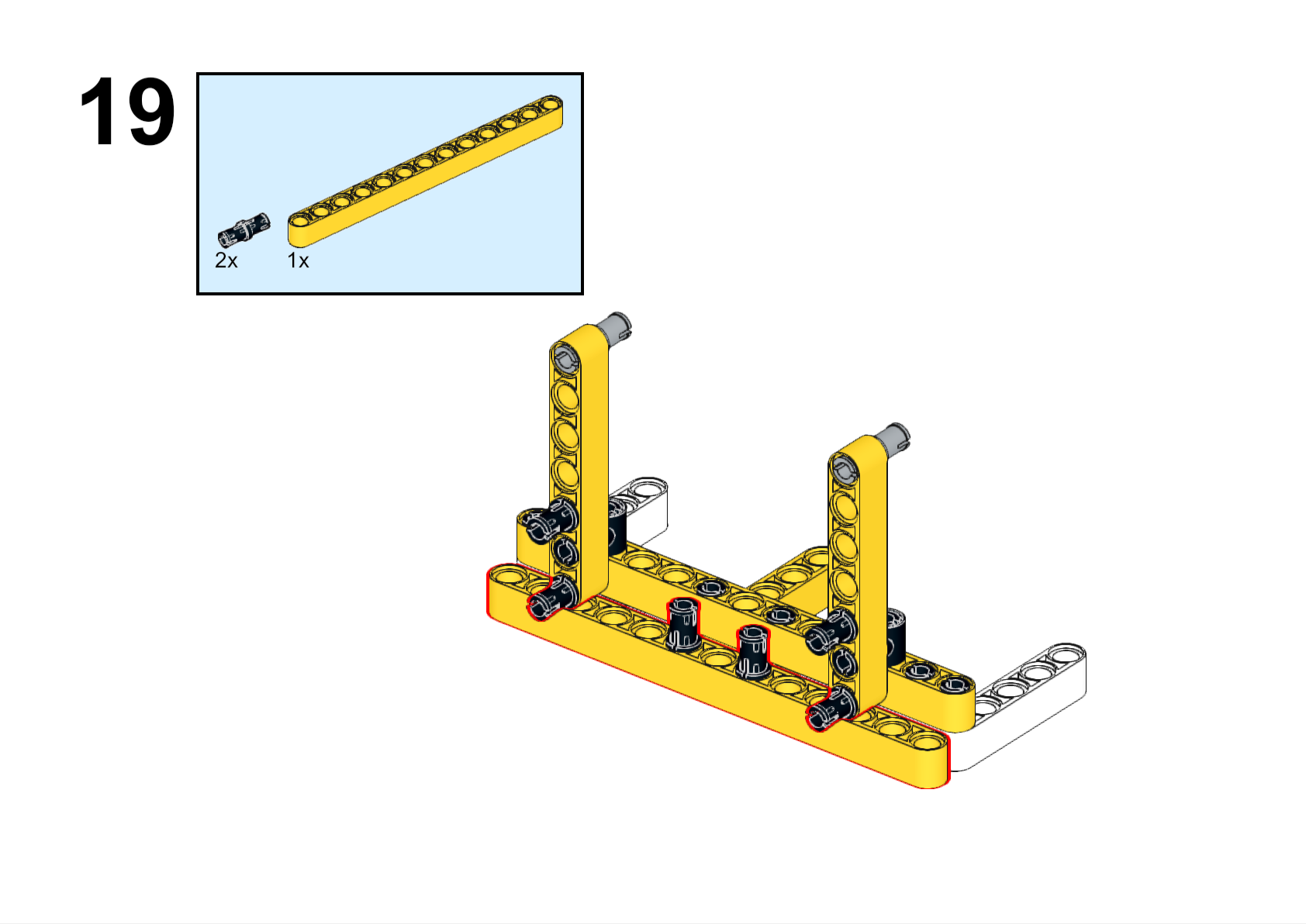
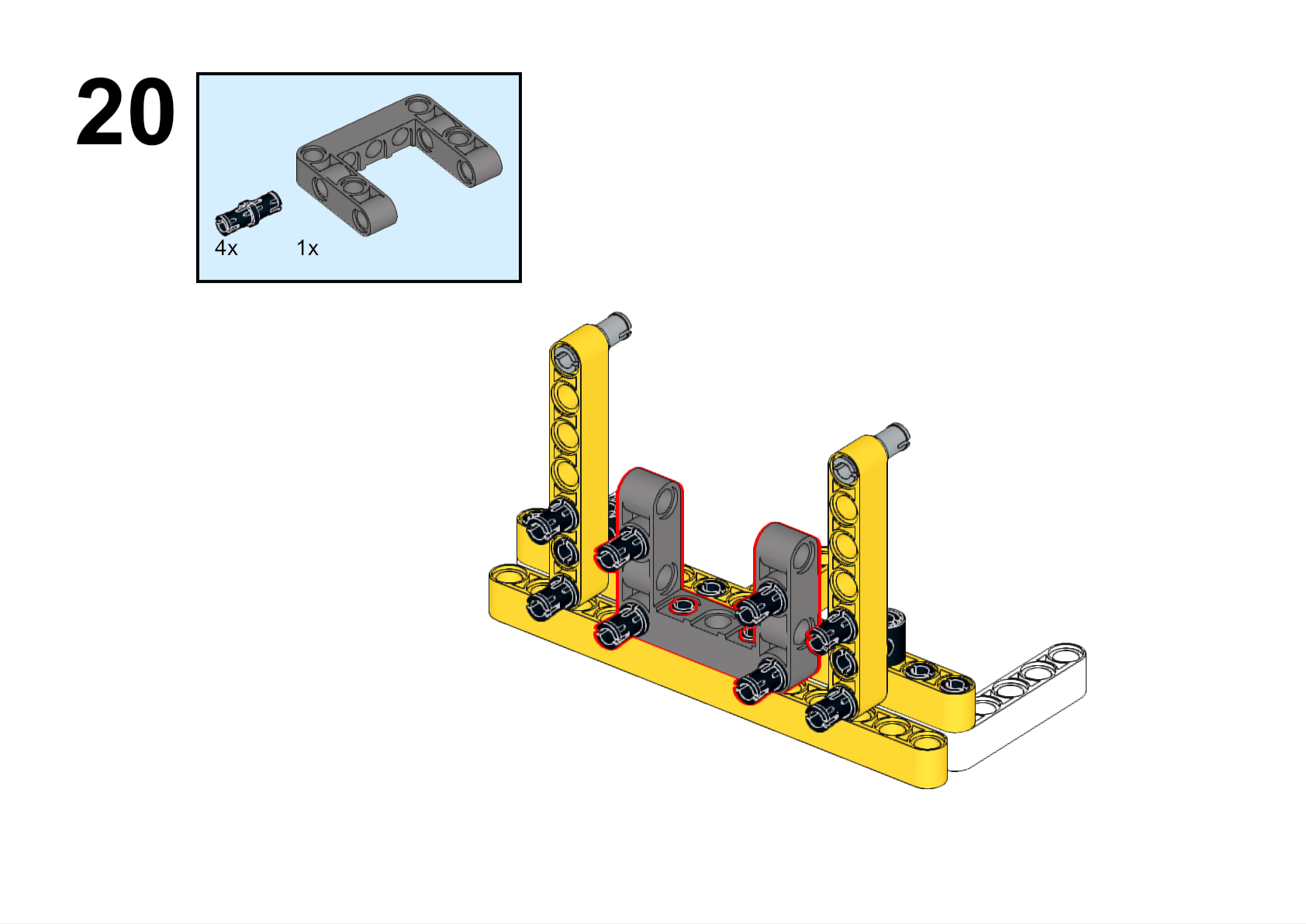
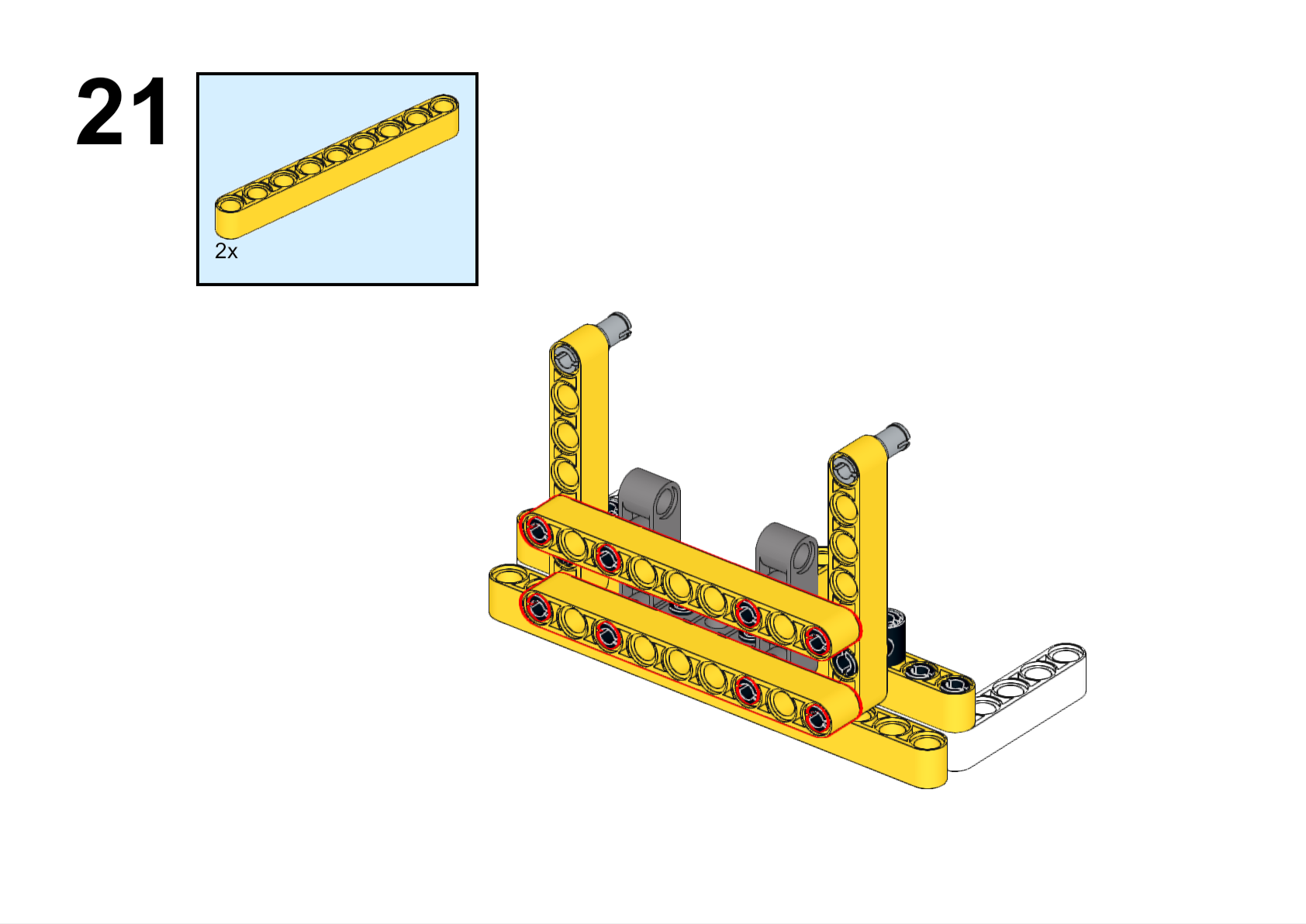
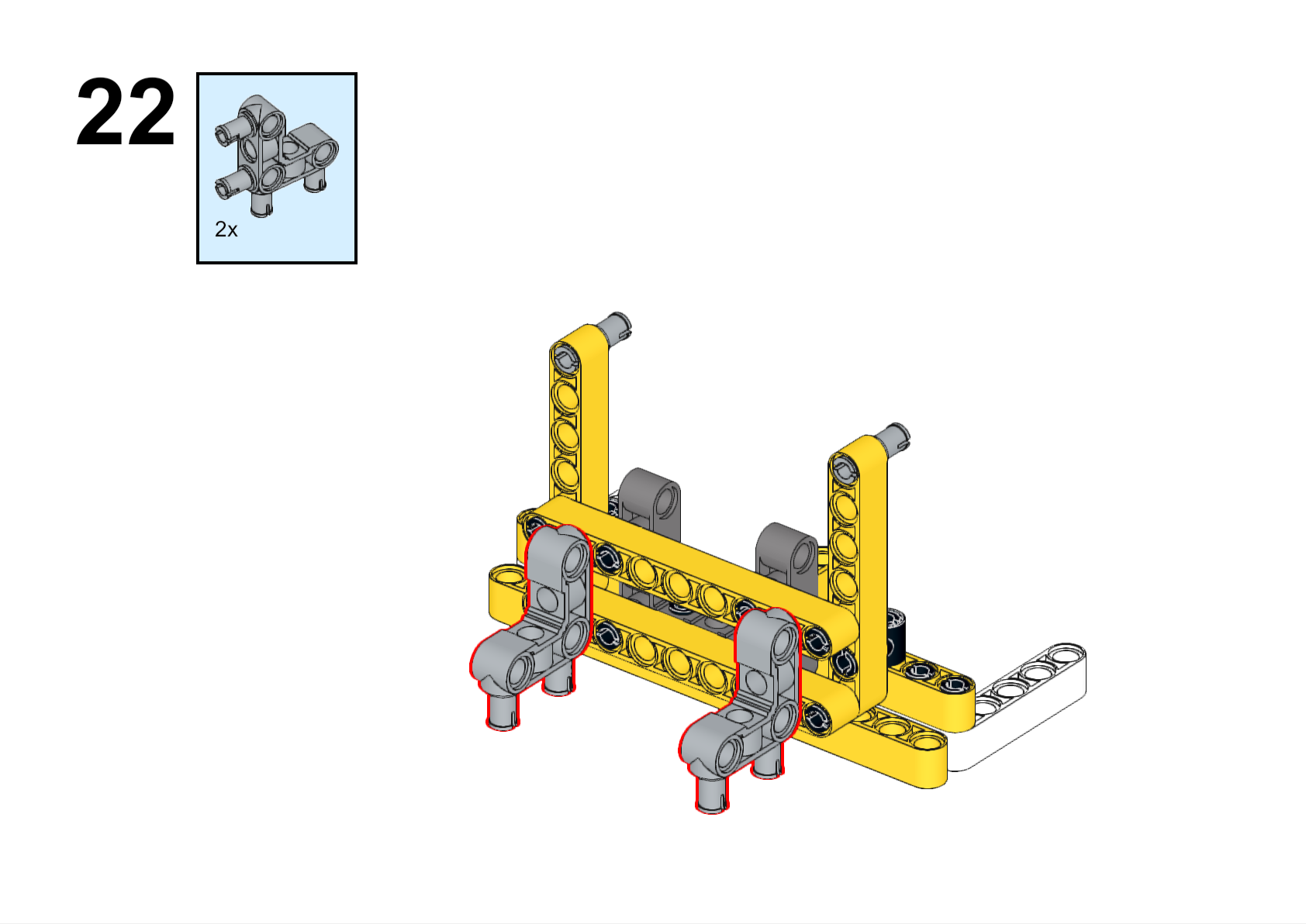
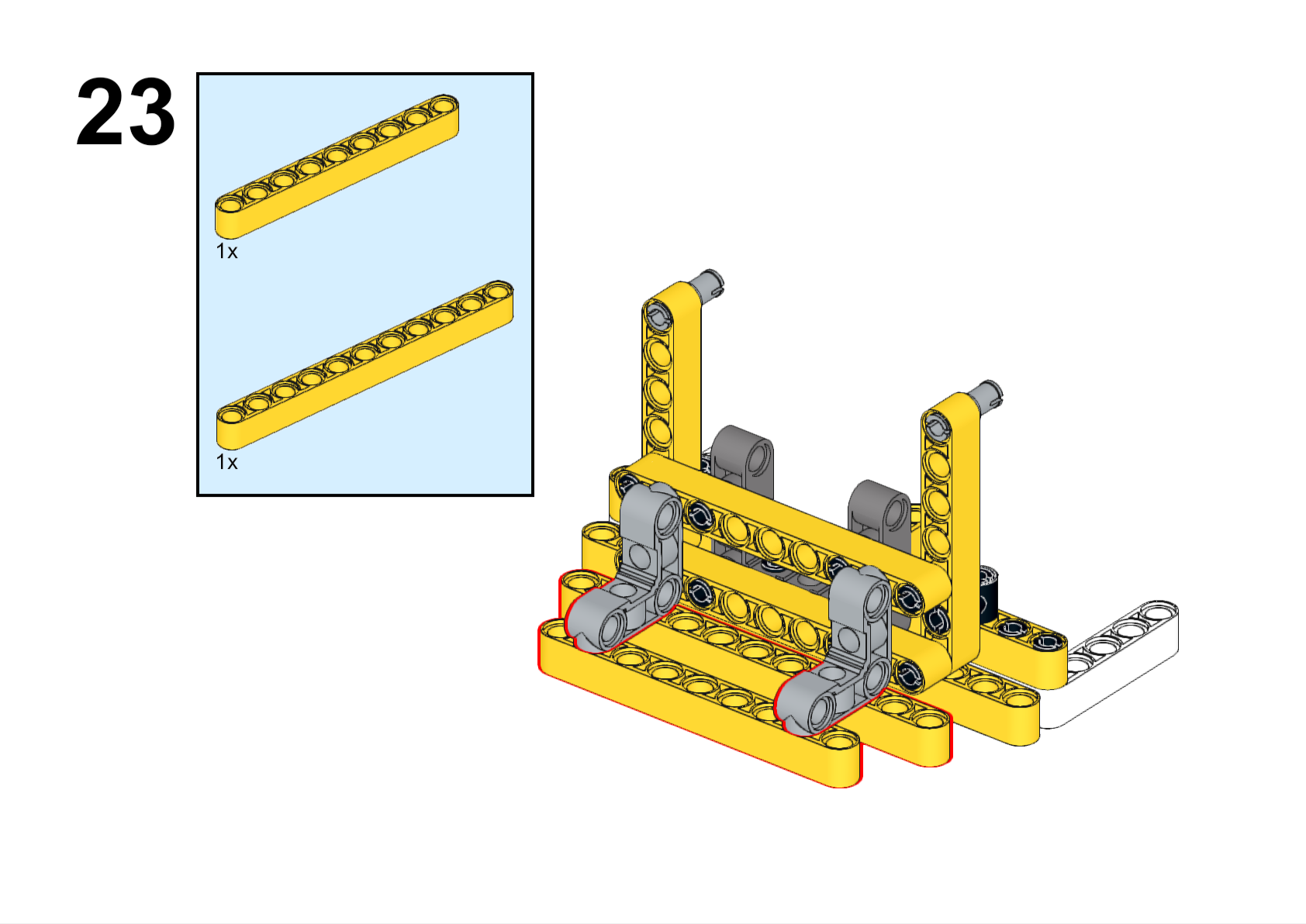
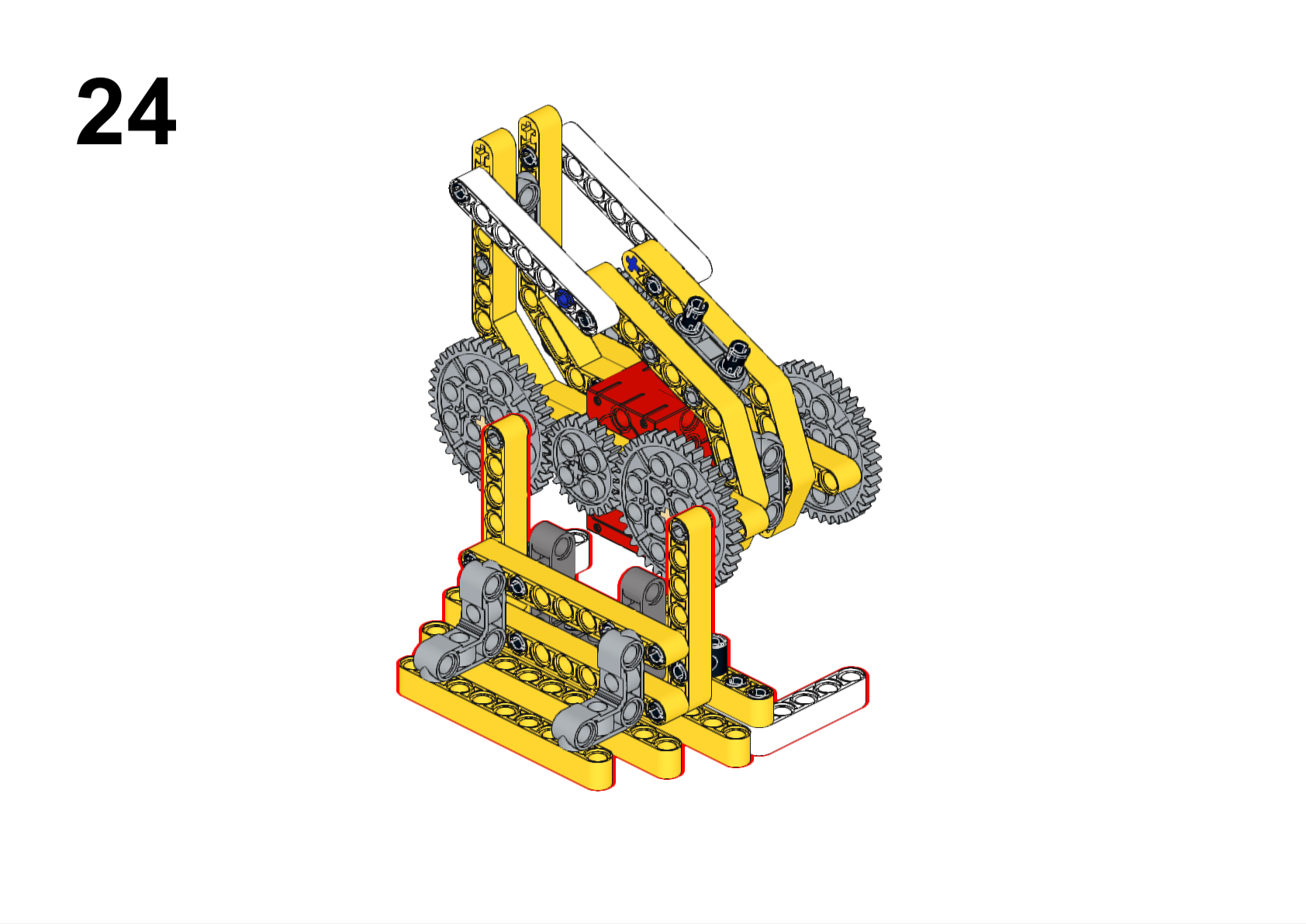
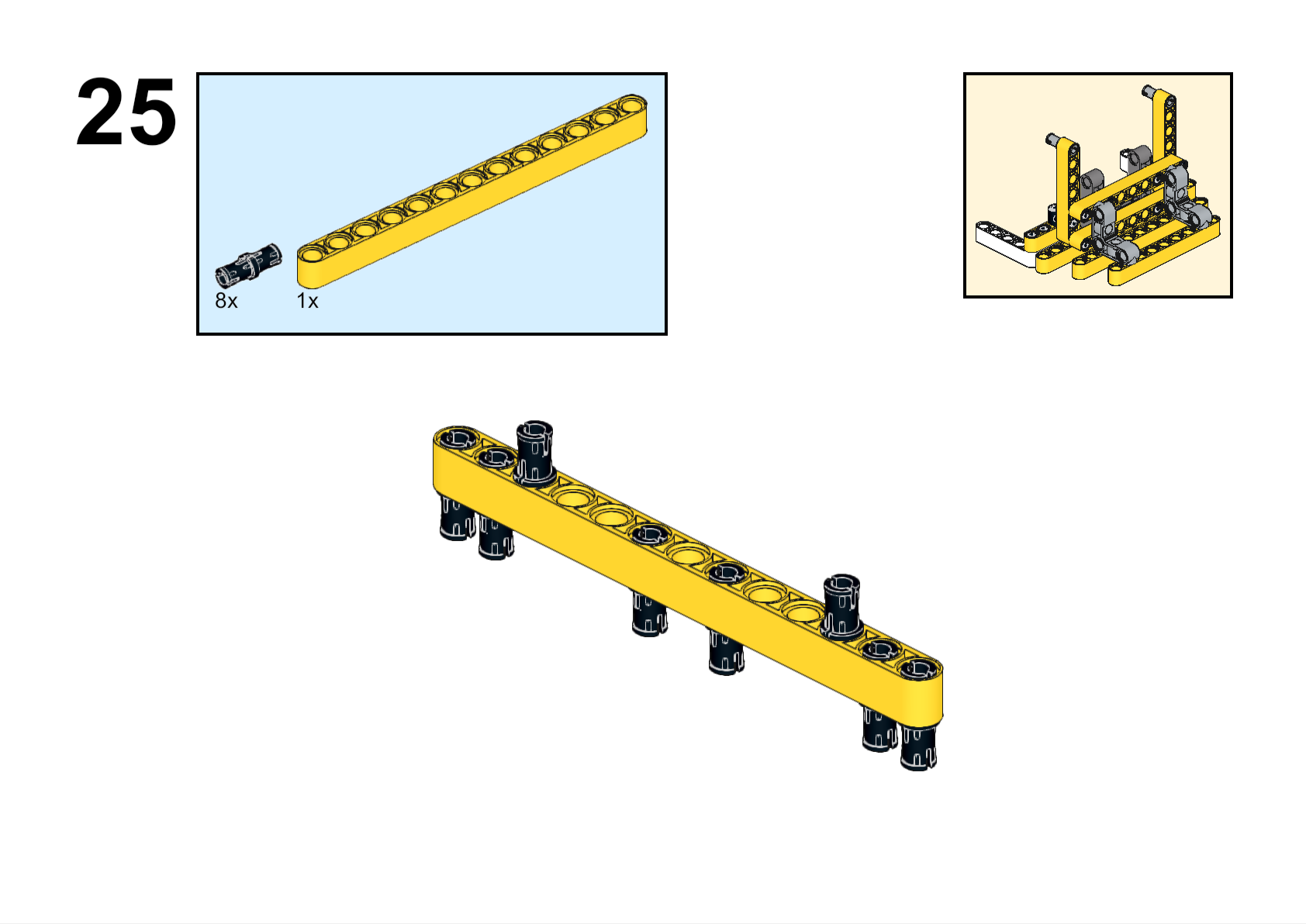
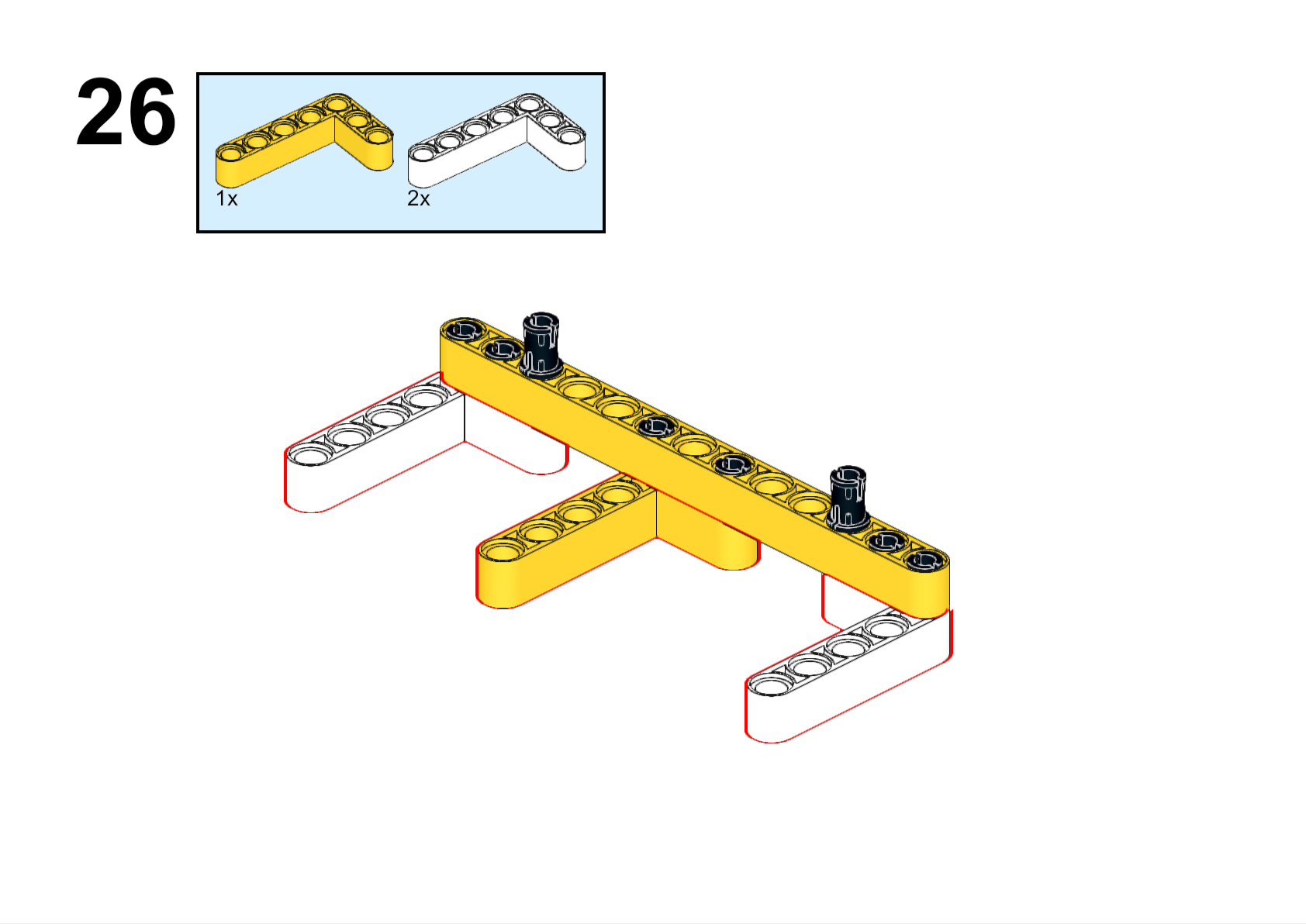
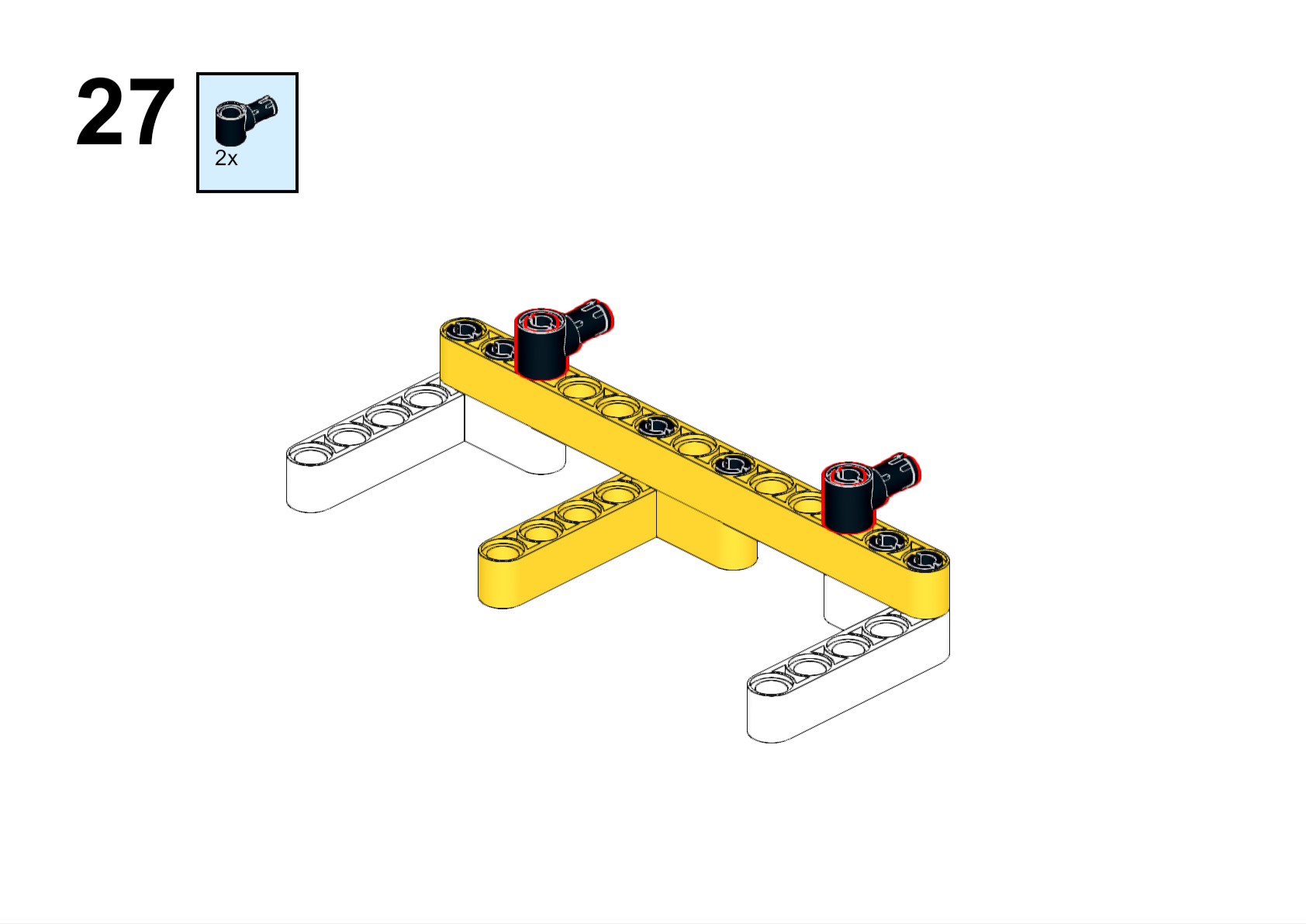
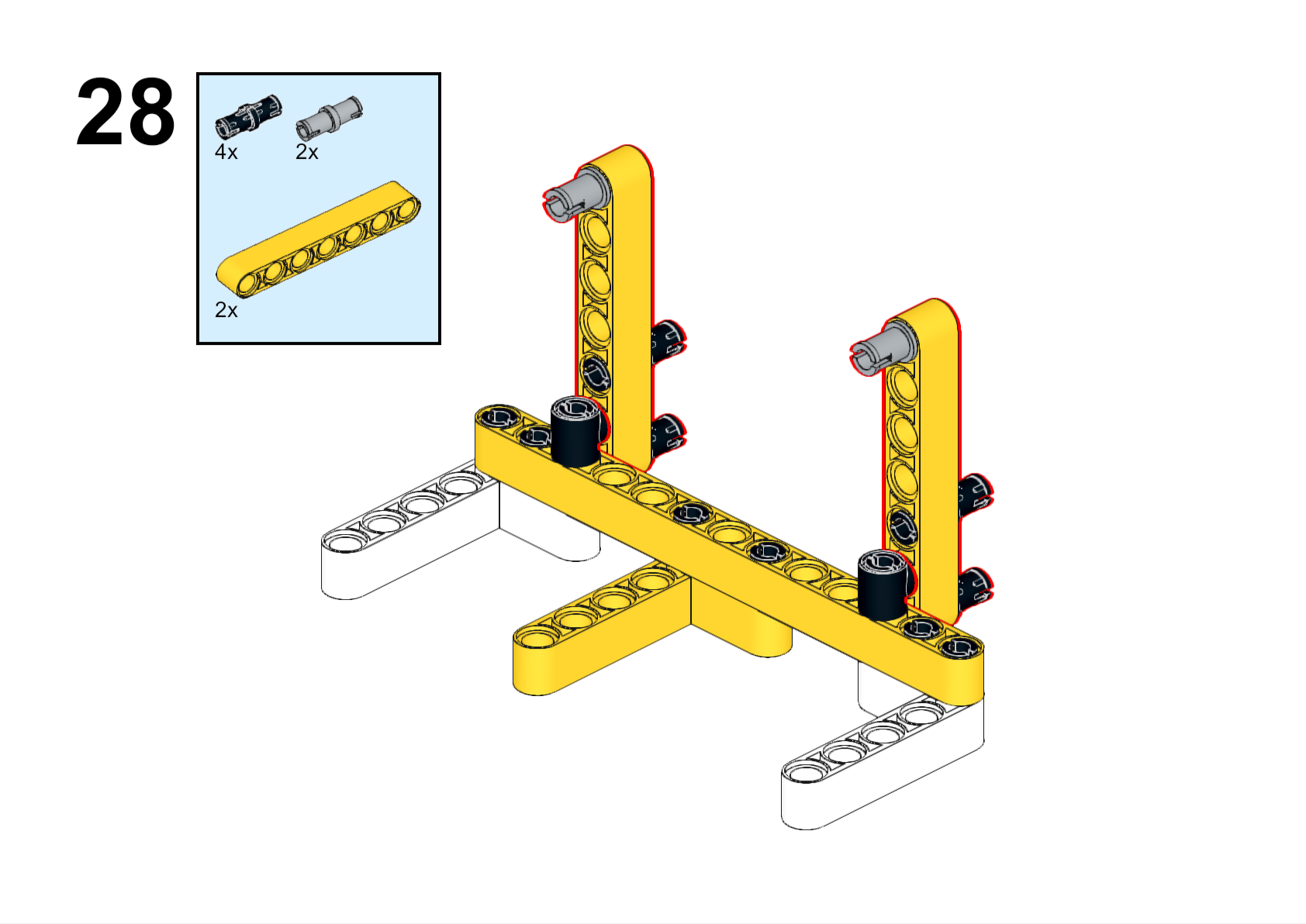
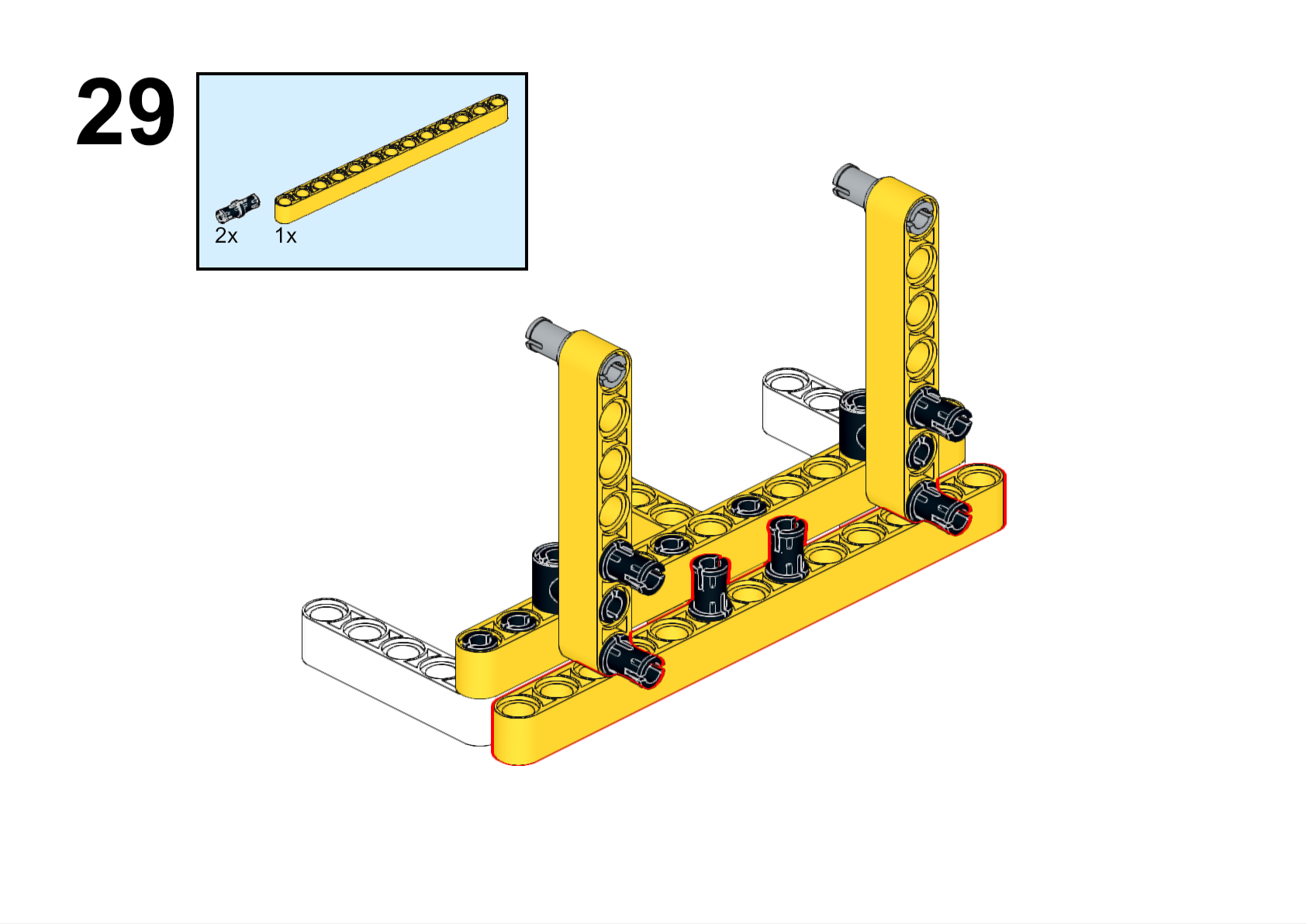
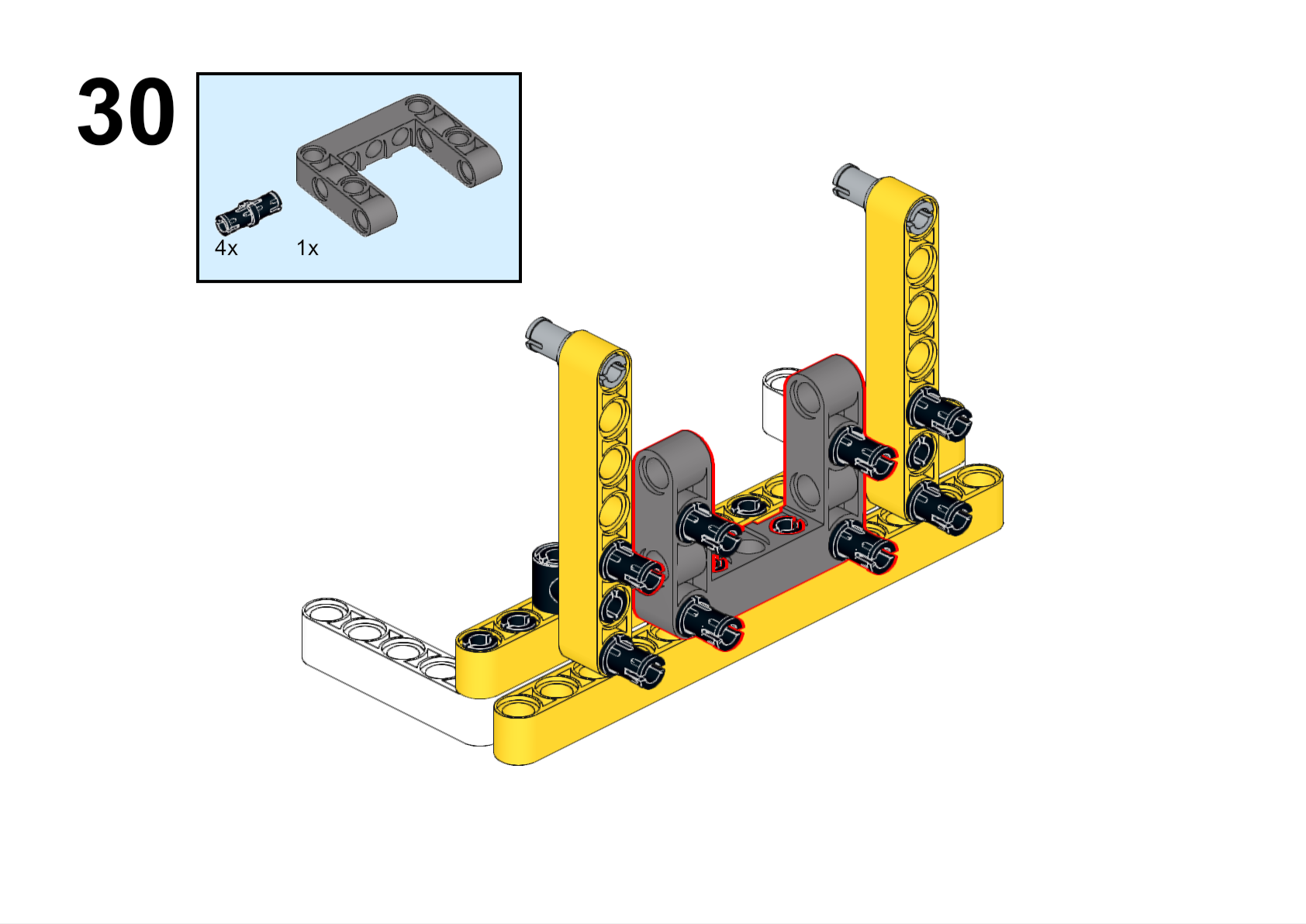
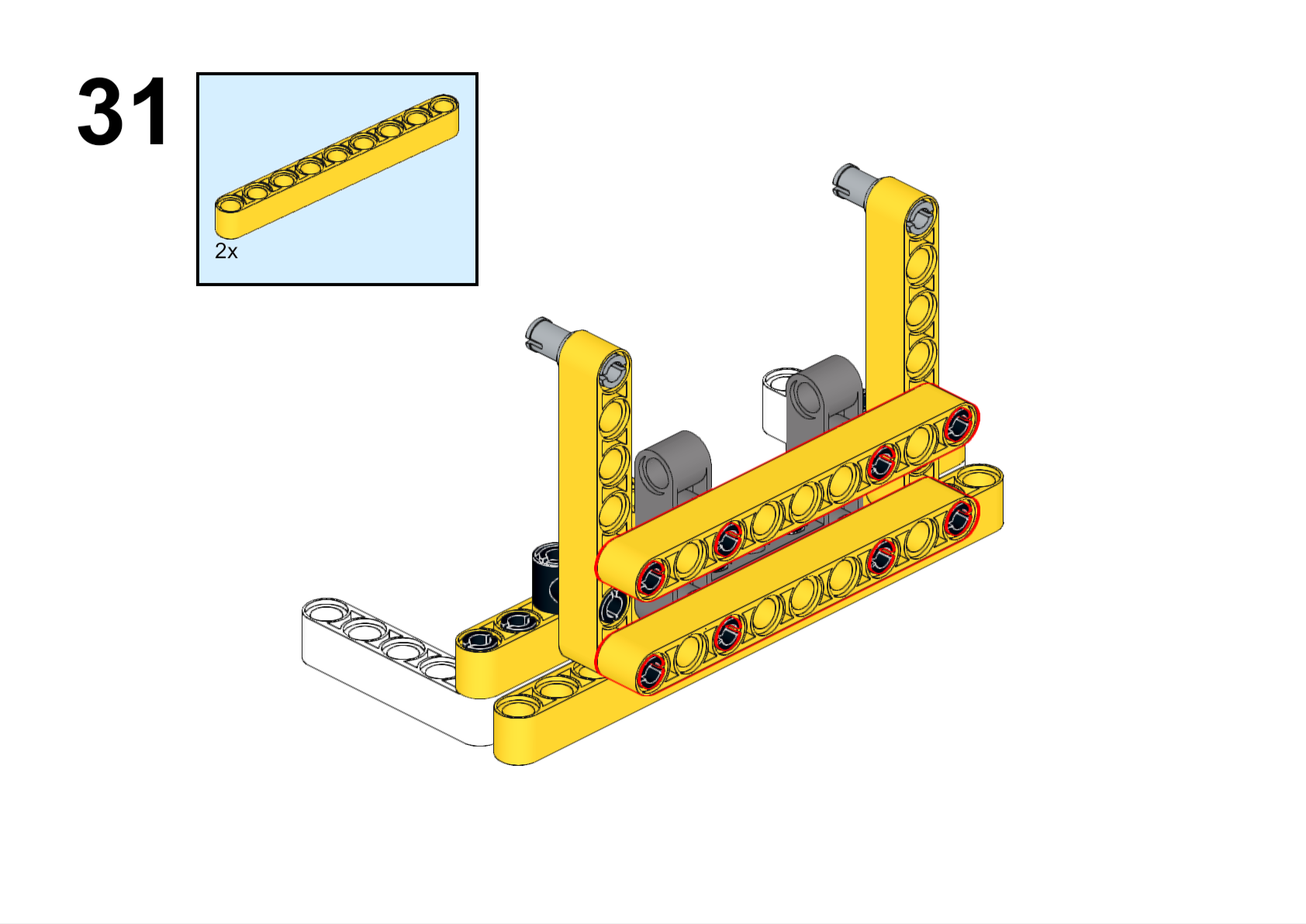
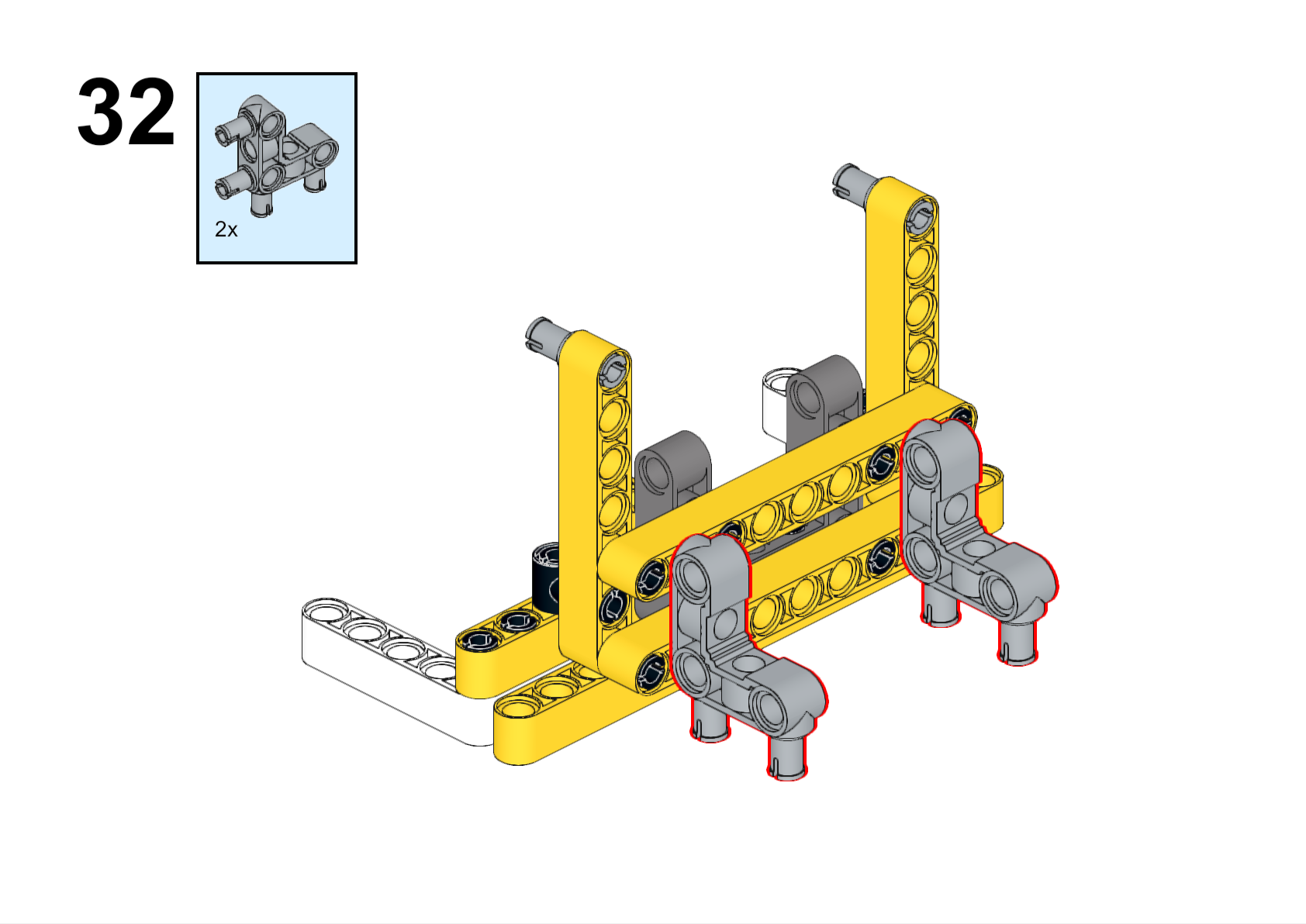
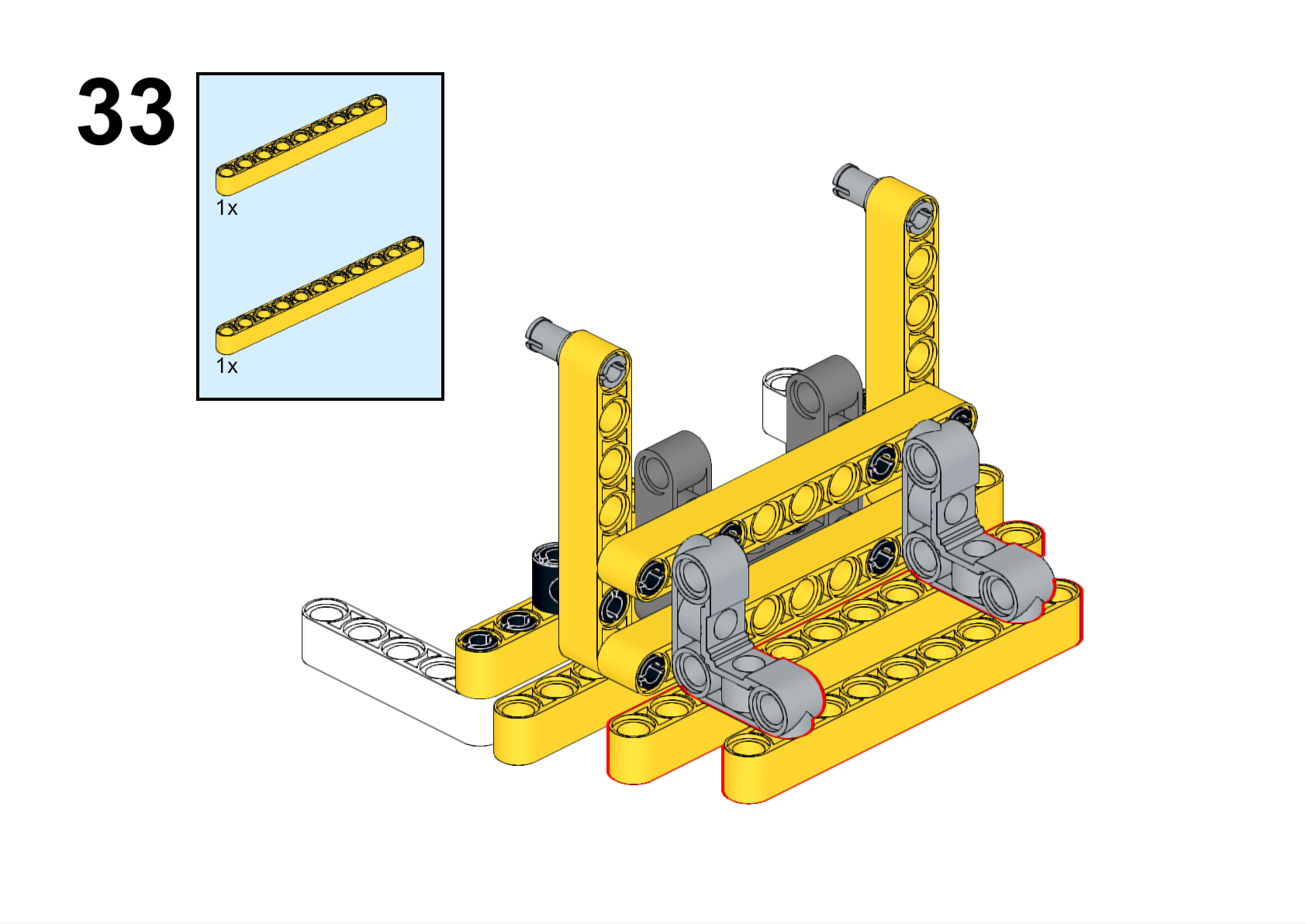
搭建步骤
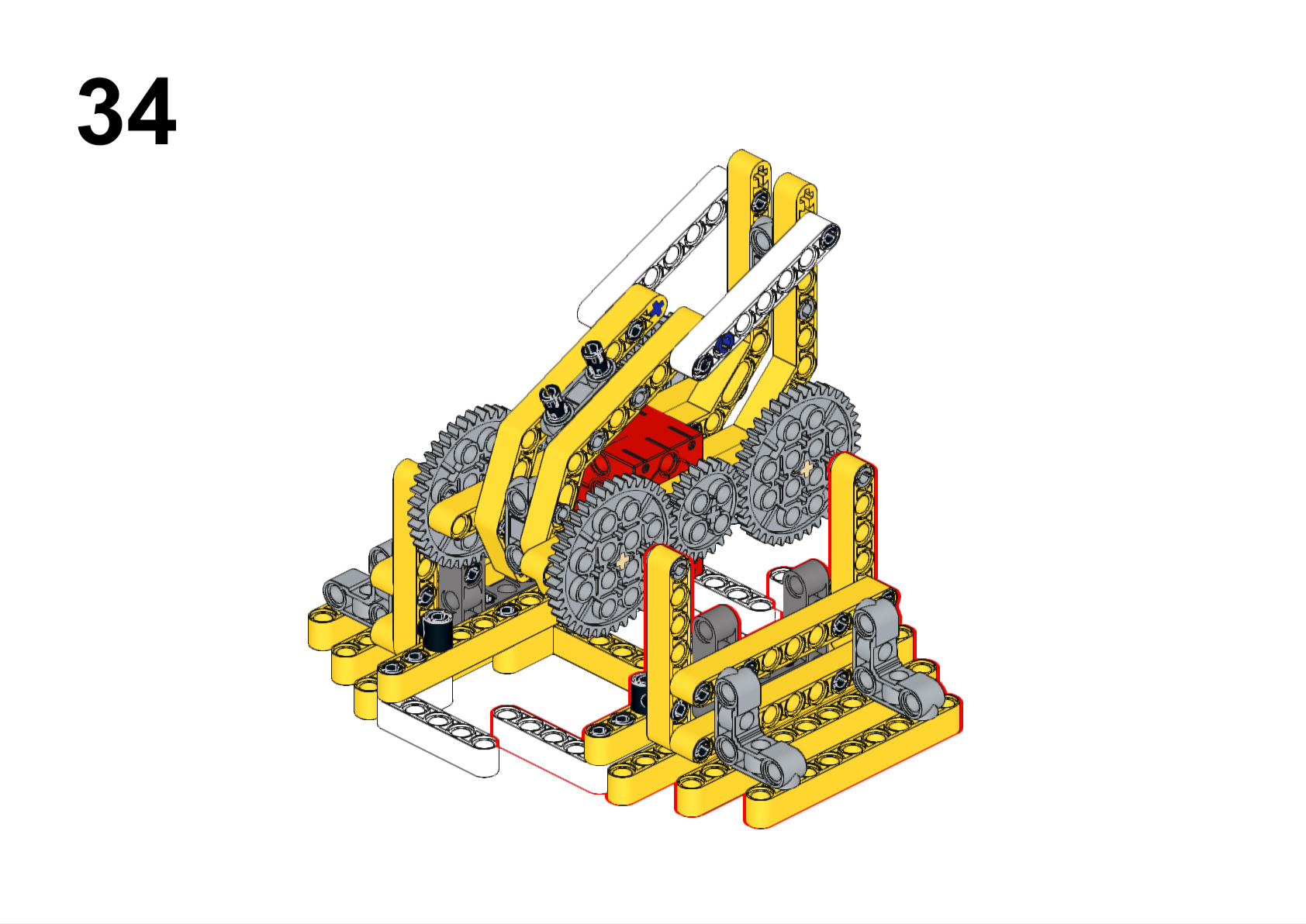
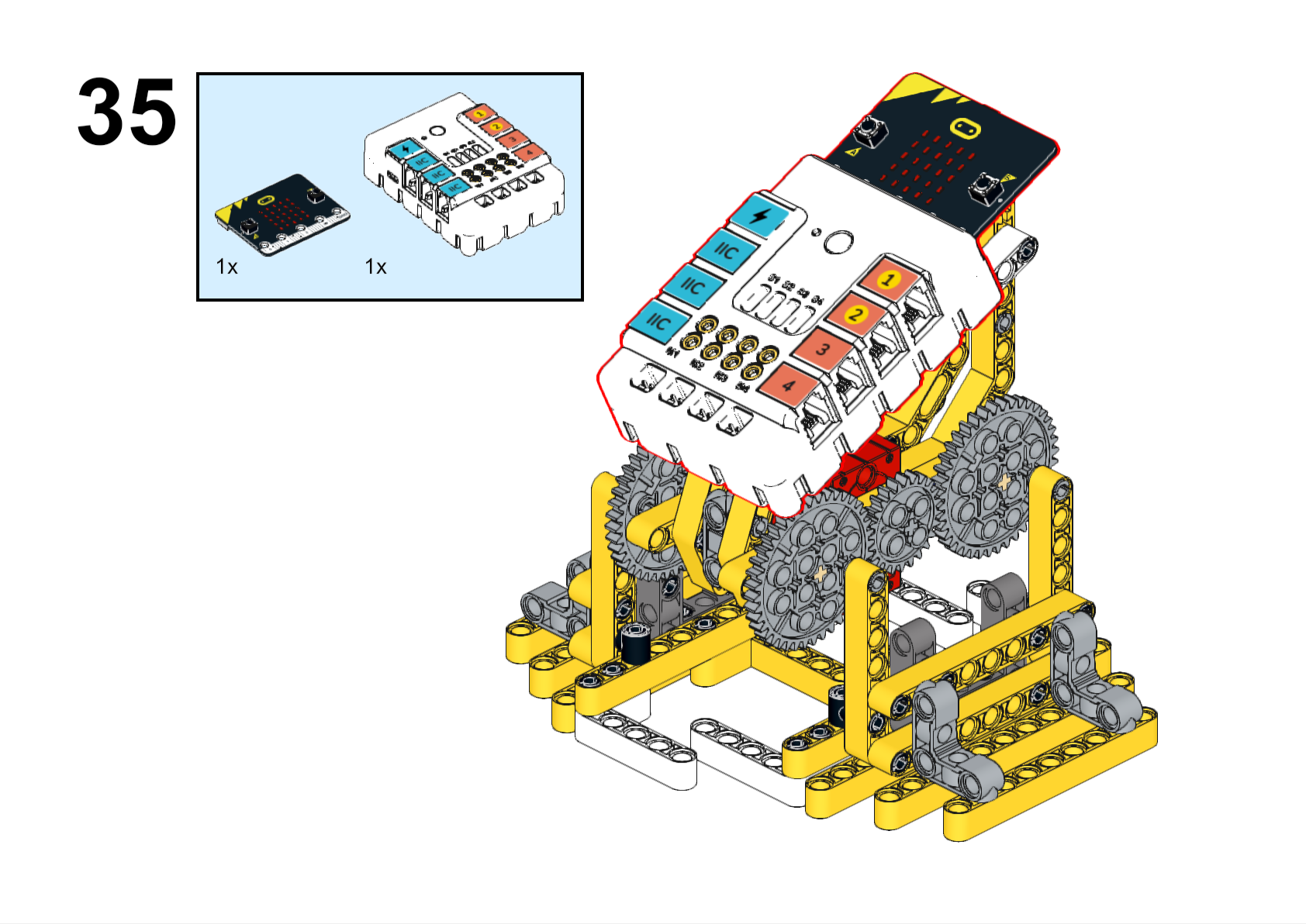
搭建完成
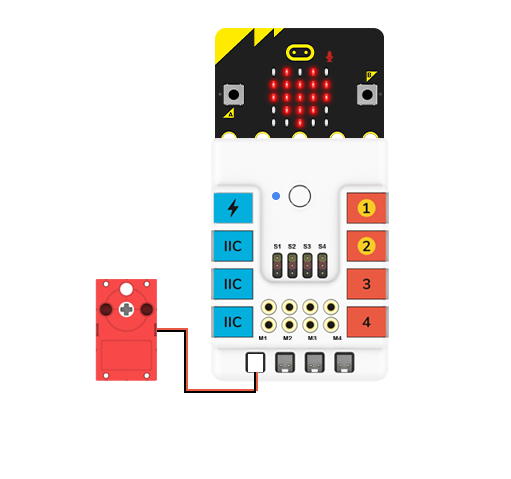
硬件连接
将电机连接到哪吒扩展板的M1接口。
软件编程
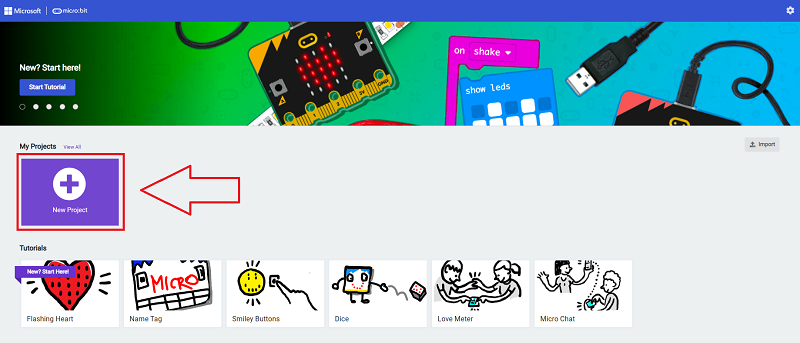
打开编程平台makecode
新建项目
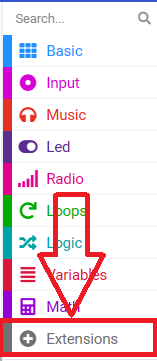
点击扩展
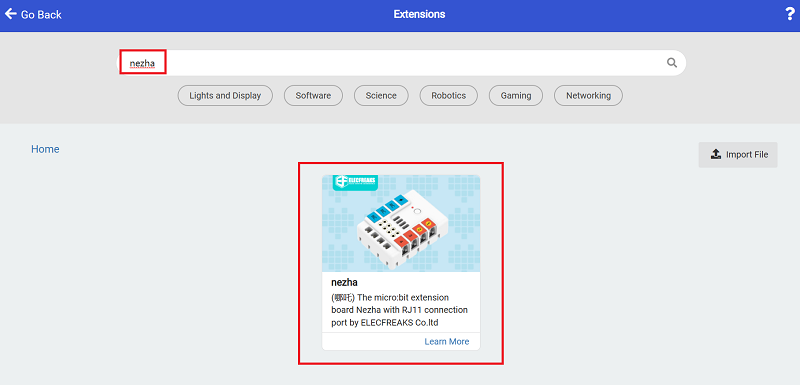
在搜索栏搜索nezha添加哪吒扩展板的扩展库
编写程序
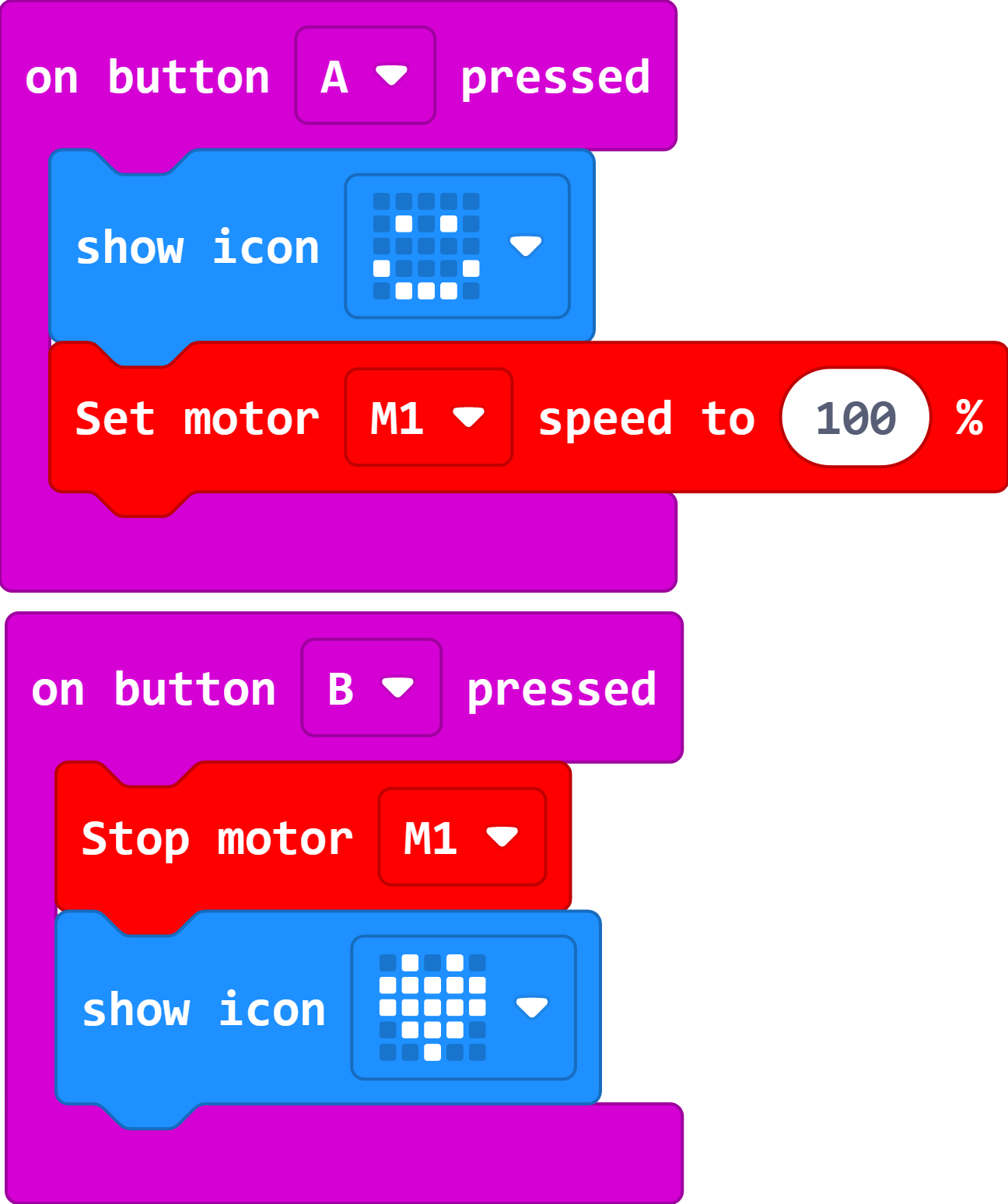
程序链接:https://makecode.microbit.org/_i3CacvKkc40L
你也可以通过以下网页直接下载程序。
展示
分组展示,比较各组的成果和效果。
示例案例效果
按下micro:bit上的A键,机器人向前行走,按下micro:bit上的B键,机器人停止行走。
反思
分组分享,让每组的学生分享自己的制作过程和心得,总结自己遇到的问题和解决办法,评价自己的优点和不足。