Case 08 The Walking Robot
Introduction
Walking is one of the most basic and common forms of locomotion in the animal world. We can observe that many animals such as humans, cats and dogs have their own unique way of walking. They achieve a stable walking movement by moving their limbs in a coordinated manner and adjusting their body balance. Different animals have different gait and posture, showing their own characteristics and flexibility.
In this project, we will try to imitate the walking movements of animals by designing and building a robot that can simulate their steps. Using the materials in Nezha Inventor's Kit V2, we will build the structure of the robot and control its movement with a motor. At the same time, we will learn and apply the principles of gearing to achieve coordinated movements and walking motions of the robot.

Teaching Objectives
- Understand the working principles and control methods of electric motors.
- Understand the basic principles and applications of gearing.
- Learn to build the basic structure of a walking robot using the materials in Nezha Inventor's Kit V2.
- Understand the effect of the centre of gravity on the stability of a robot and learn how to adjust the centre of gravity to keep the robot in balance.
- Develop creativity, problem solving skills and teamwork.
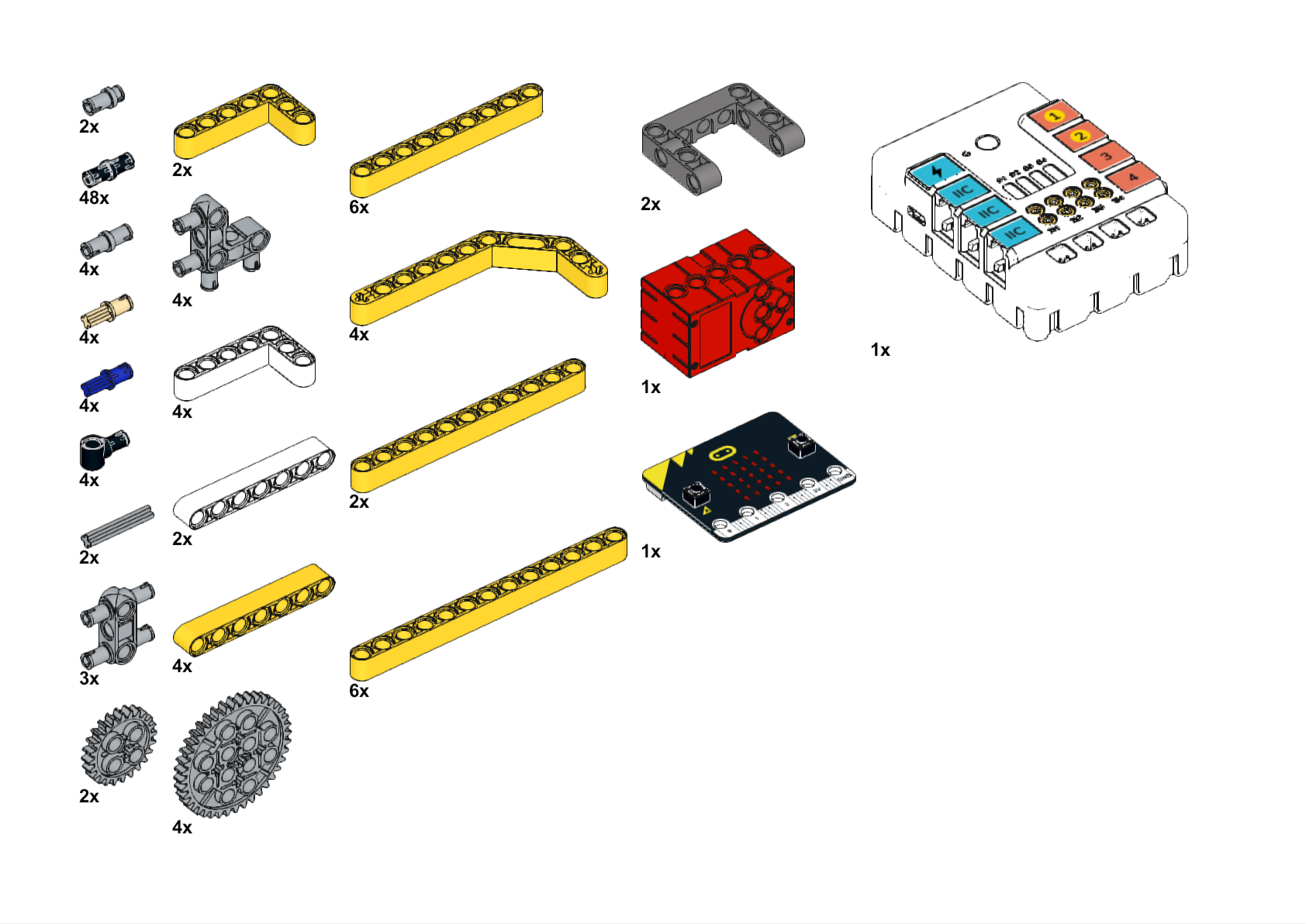
Teaching Preparation
Teaching Process
Introduce
Introduce students to the background and objectives of making a walking robot to stimulate their interest and curiosity.
Walking is one of the most basic and common forms of locomotion in the animal world. We can observe that many animals such as humans, cats and dogs have their own unique ways of walking. They achieve a stable walking movement by moving their limbs in a coordinated manner and adjusting their body balance. Different animals have different gait and posture, showing their own characteristics and flexibility.
In this project, we will try to imitate the walking movements of animals by designing and building a robot that can simulate their steps. Using the materials in Nezha Inventor's Kit V2, we will build the structure of the robot and control its movement with a motor. At the same time, we will learn and apply the principles of gearing to achieve coordinated movements and walking motions of the robot.
Exploration
Discuss in small groups and get students thinking about how they could build a walking robot from block materials, focusing on the effects of gearing and the centre of gravity on balance.
- Can you change the walking speed of the robot by adjusting the gearing ratio?
- How can you adjust the position of the robot's centre of gravity to keep the robot balanced?
- What effect would adding more gearing to the robot have on how well the robot walks?
Practice
Work in groups to create a walking robot from block materials according to your own design.
Build a walking robot out of blocks according to your own design and see whose robot goes faster.
Examples
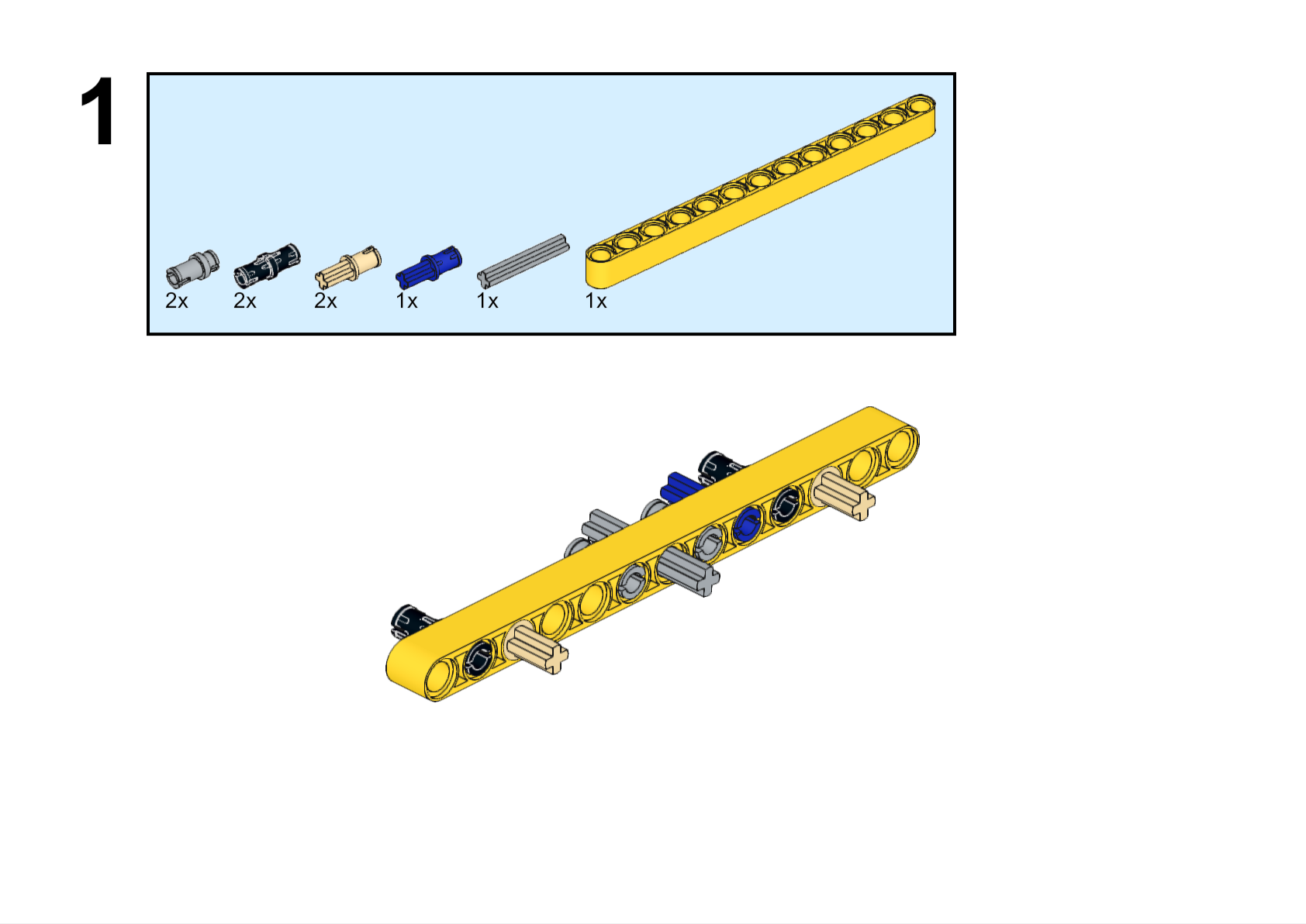
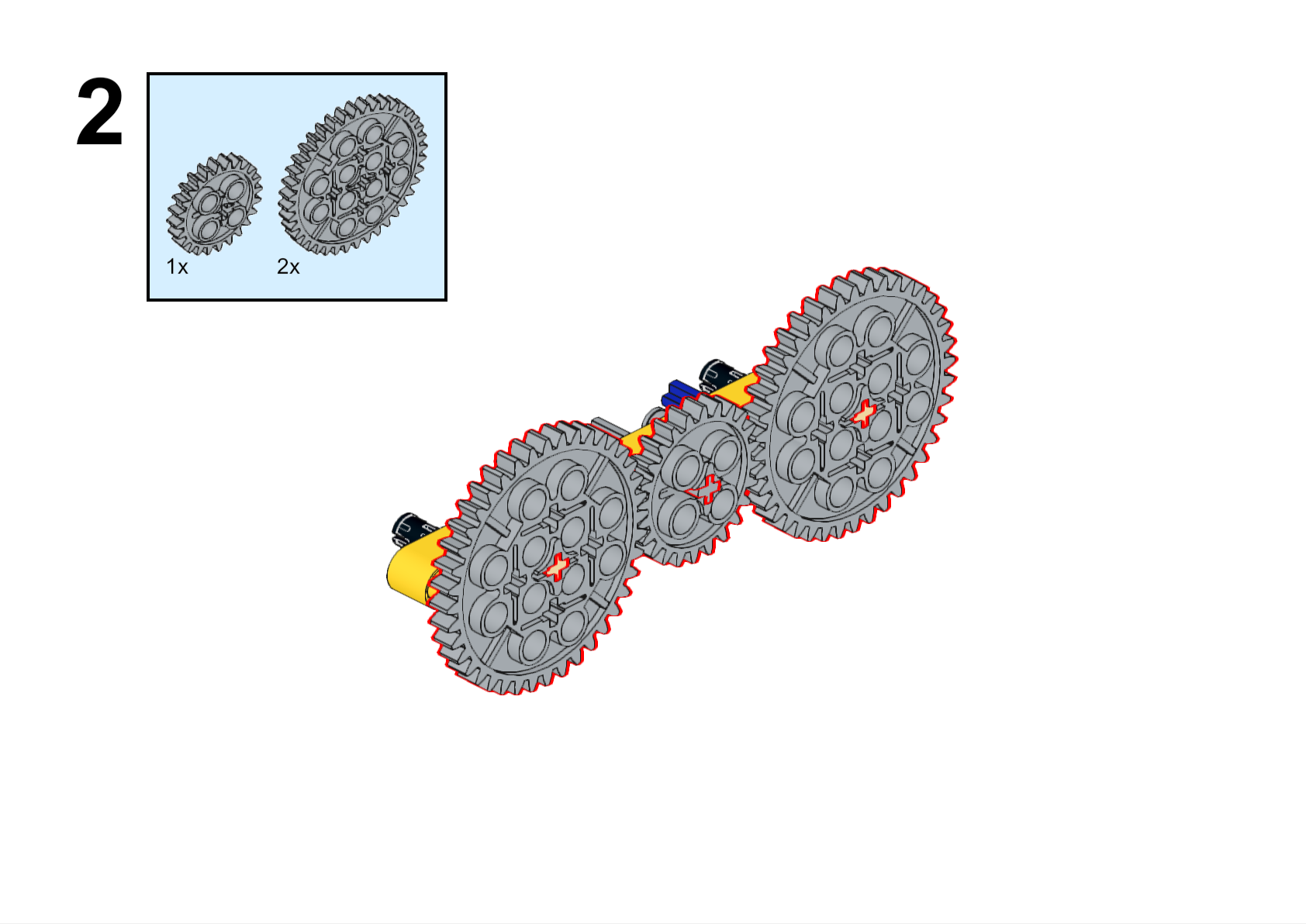
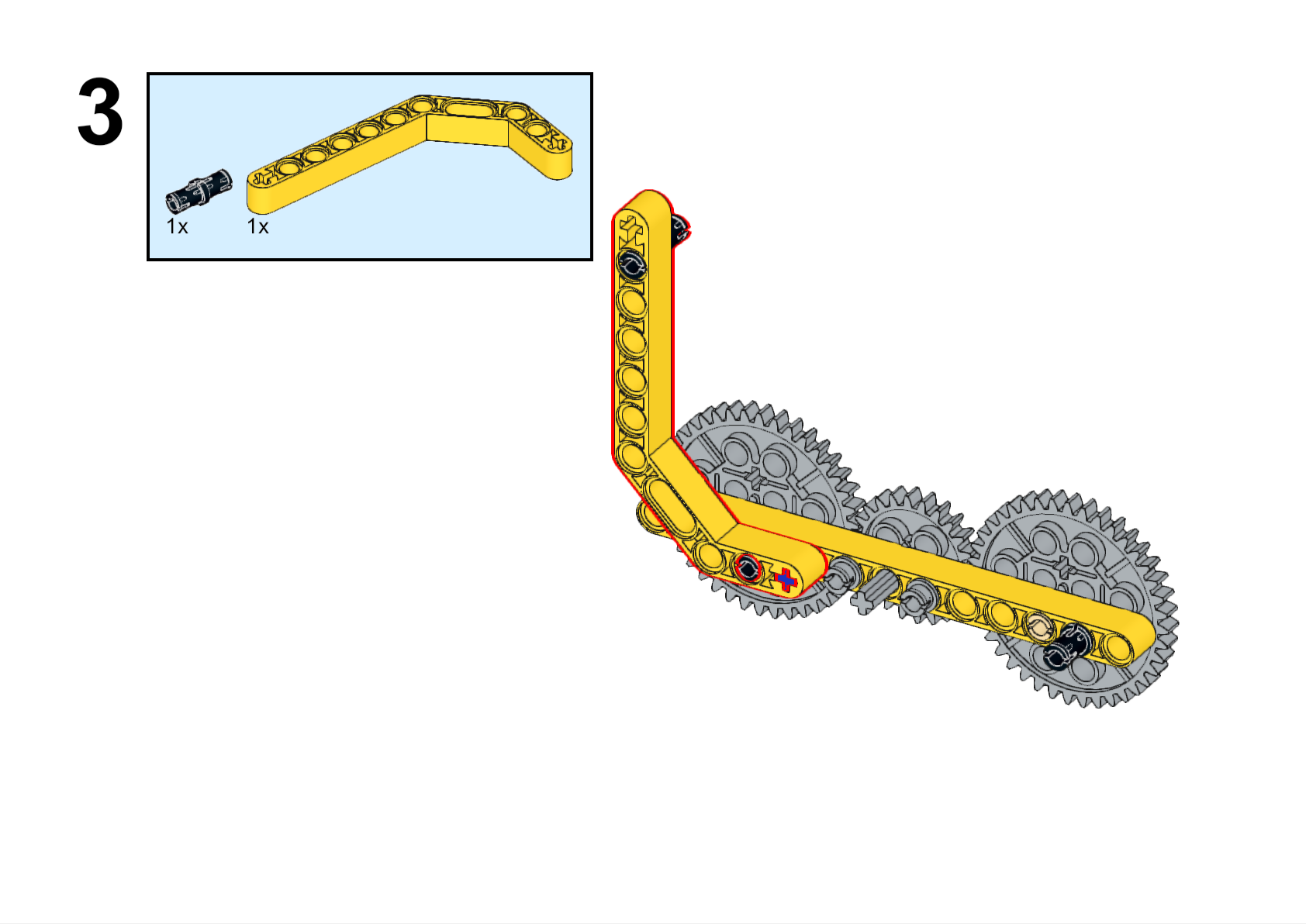
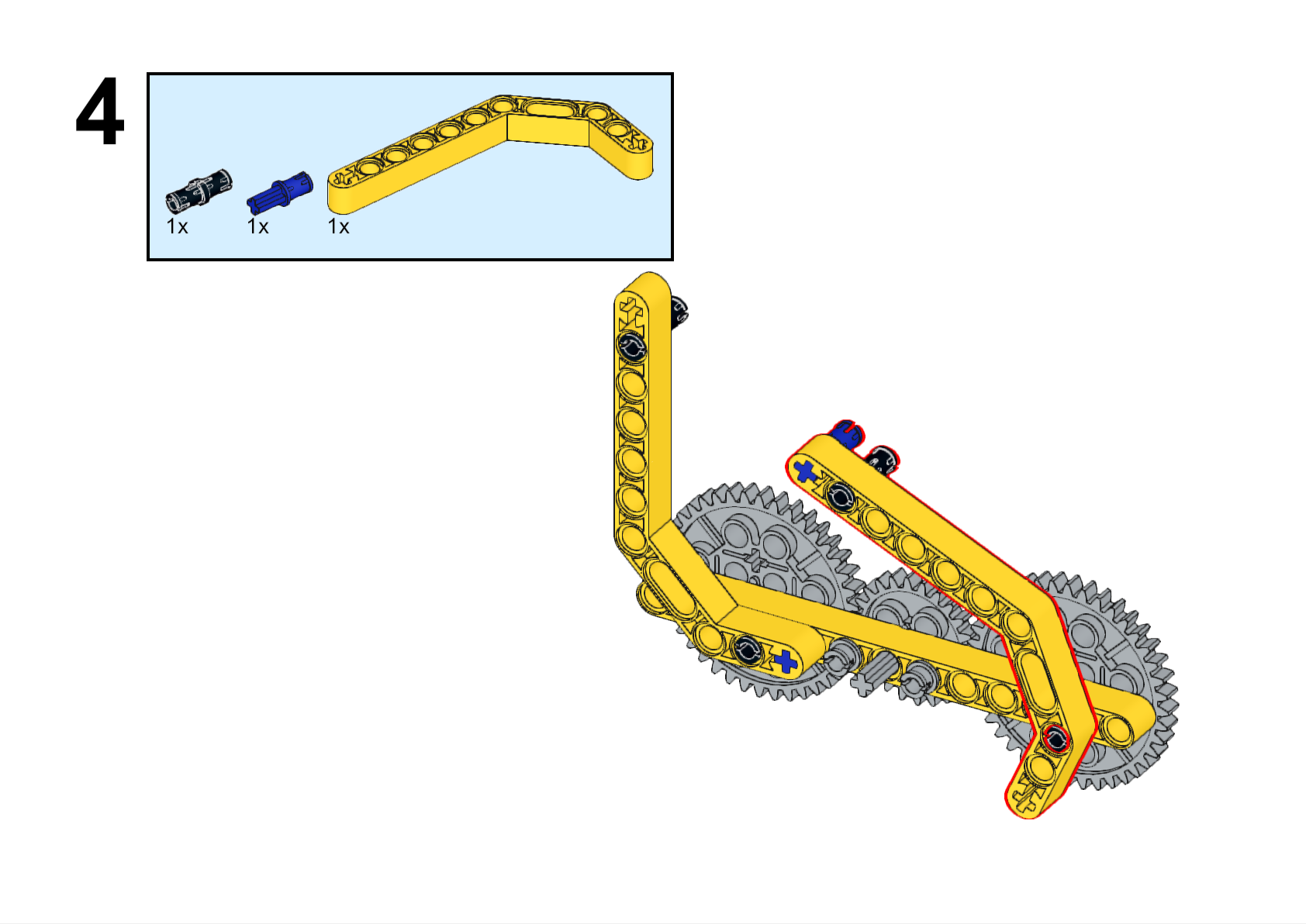
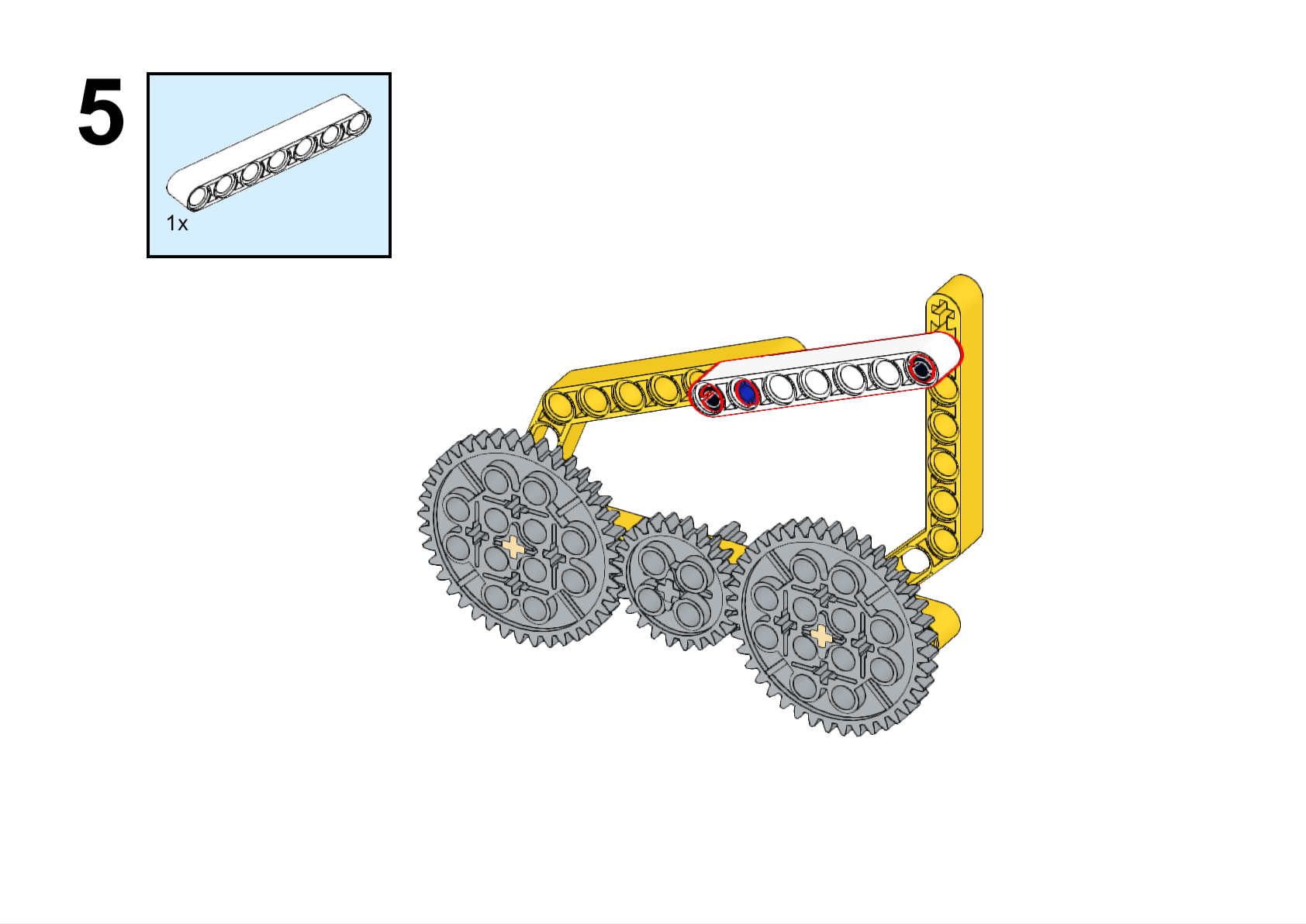
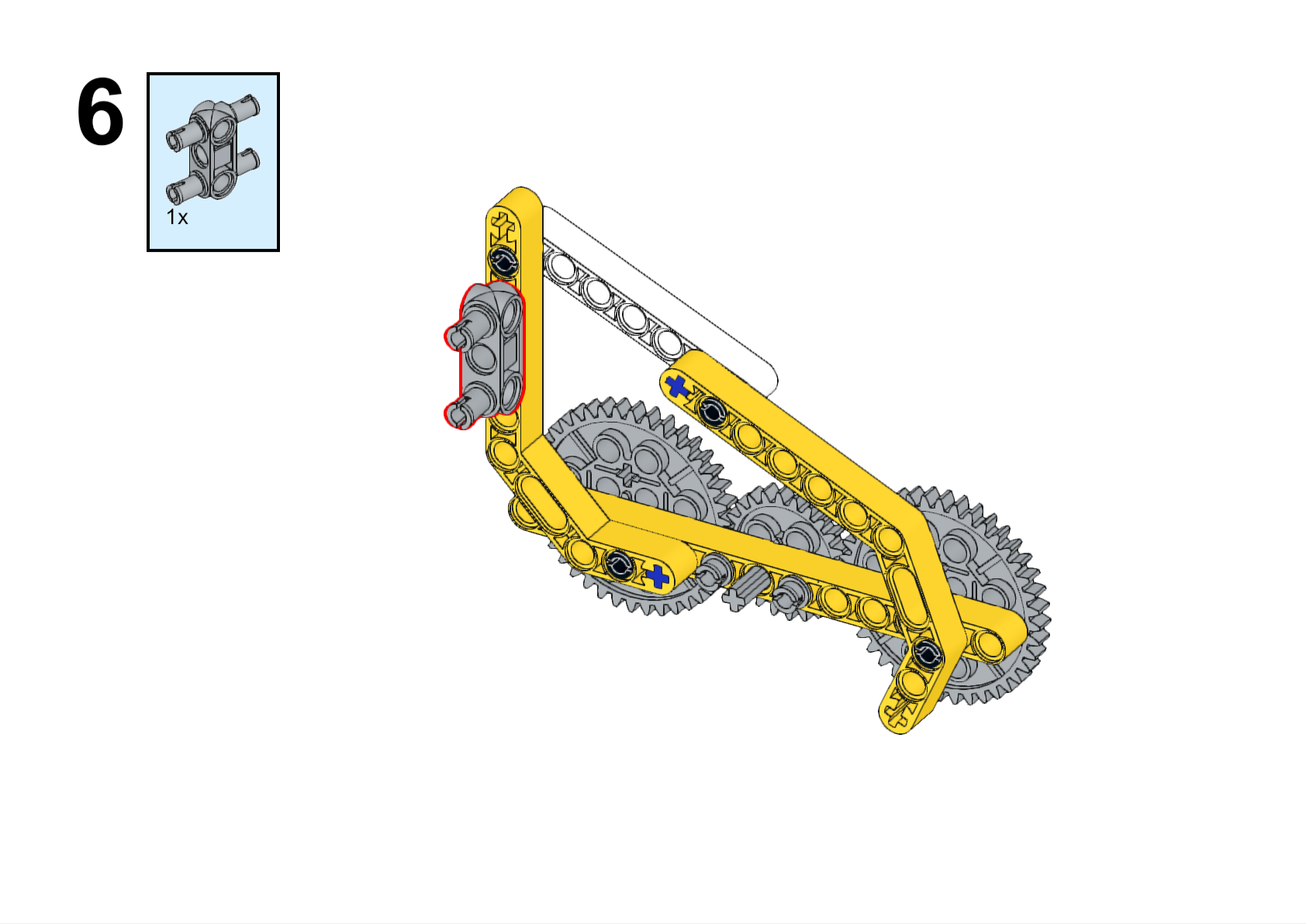
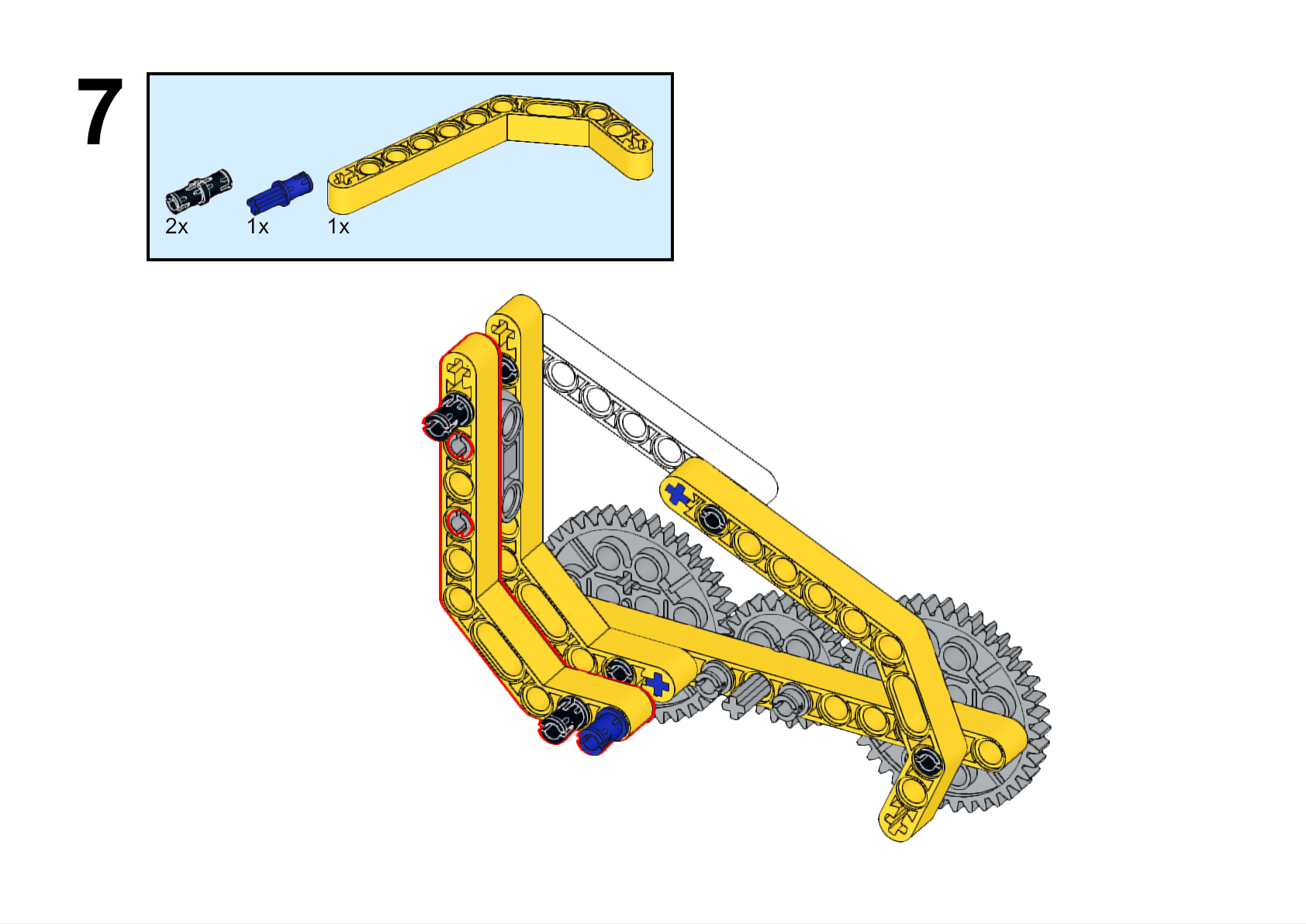
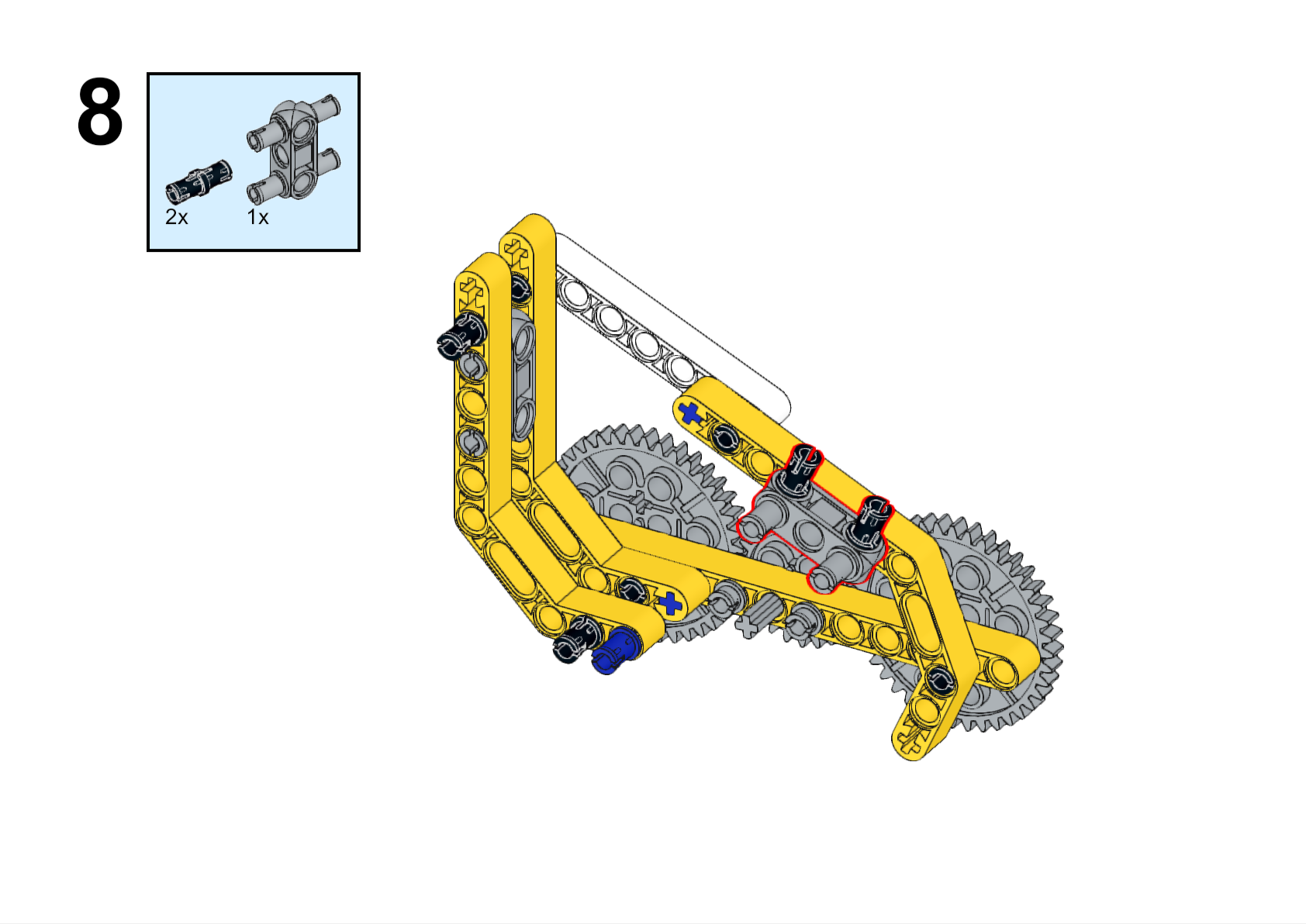
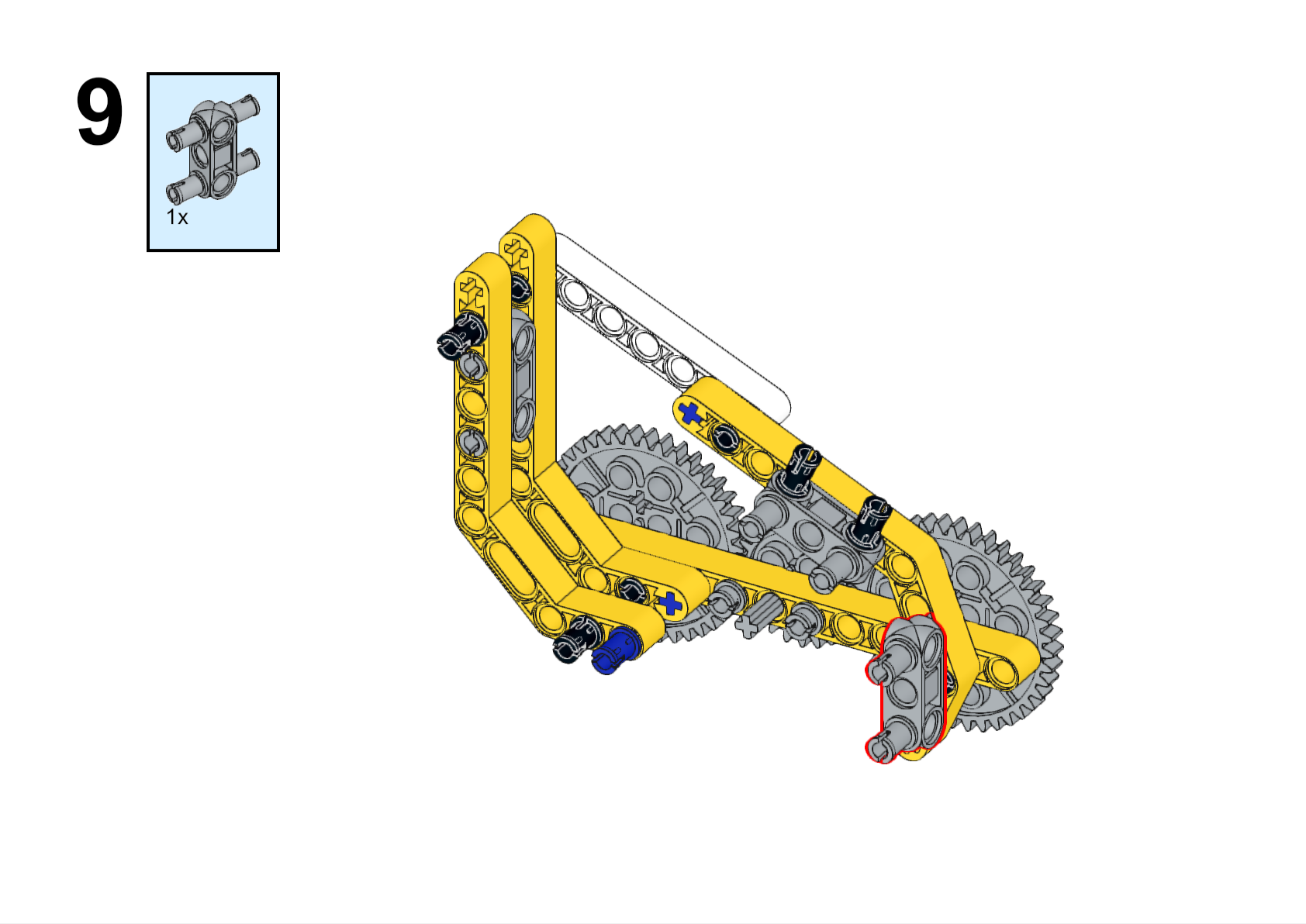
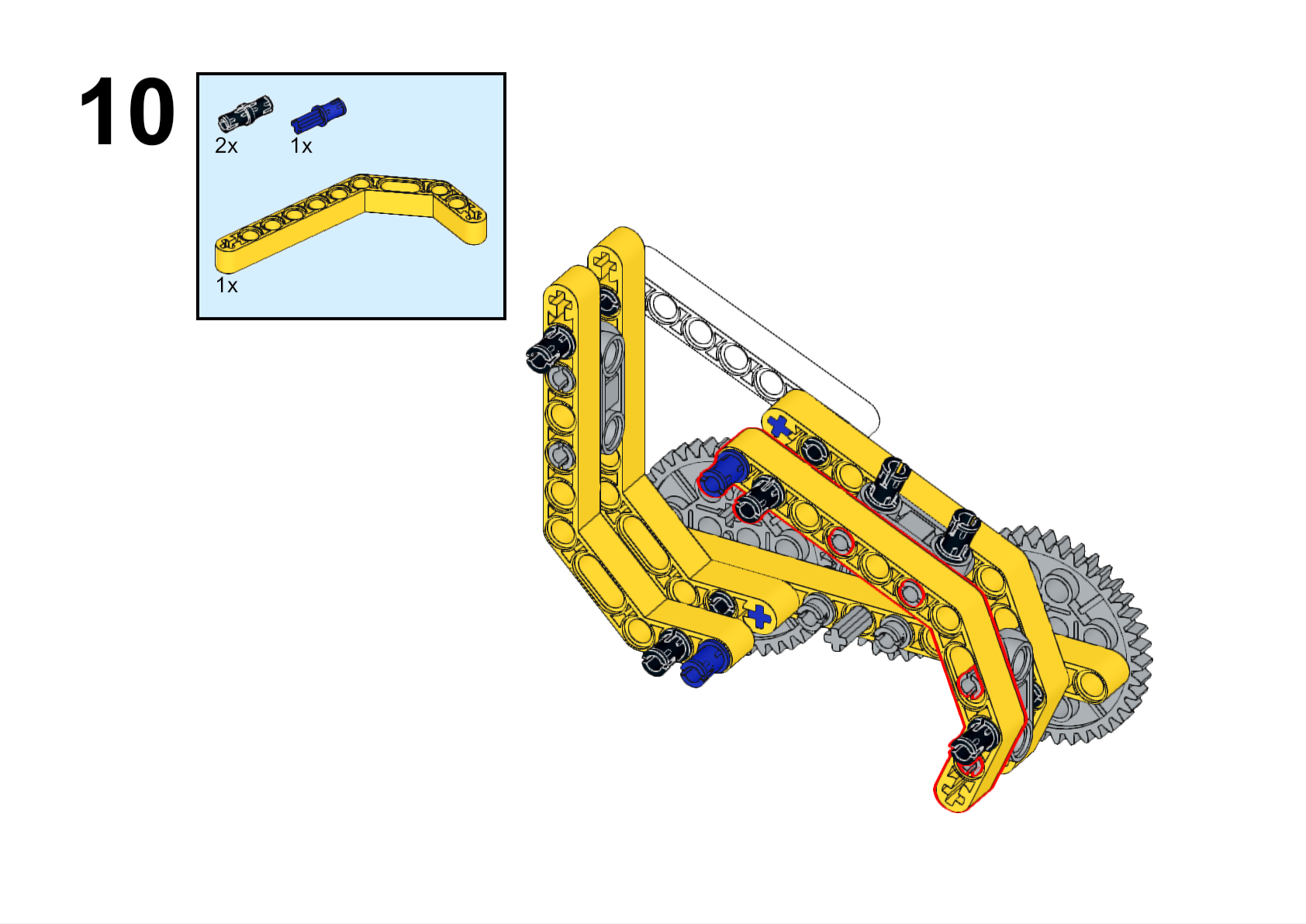
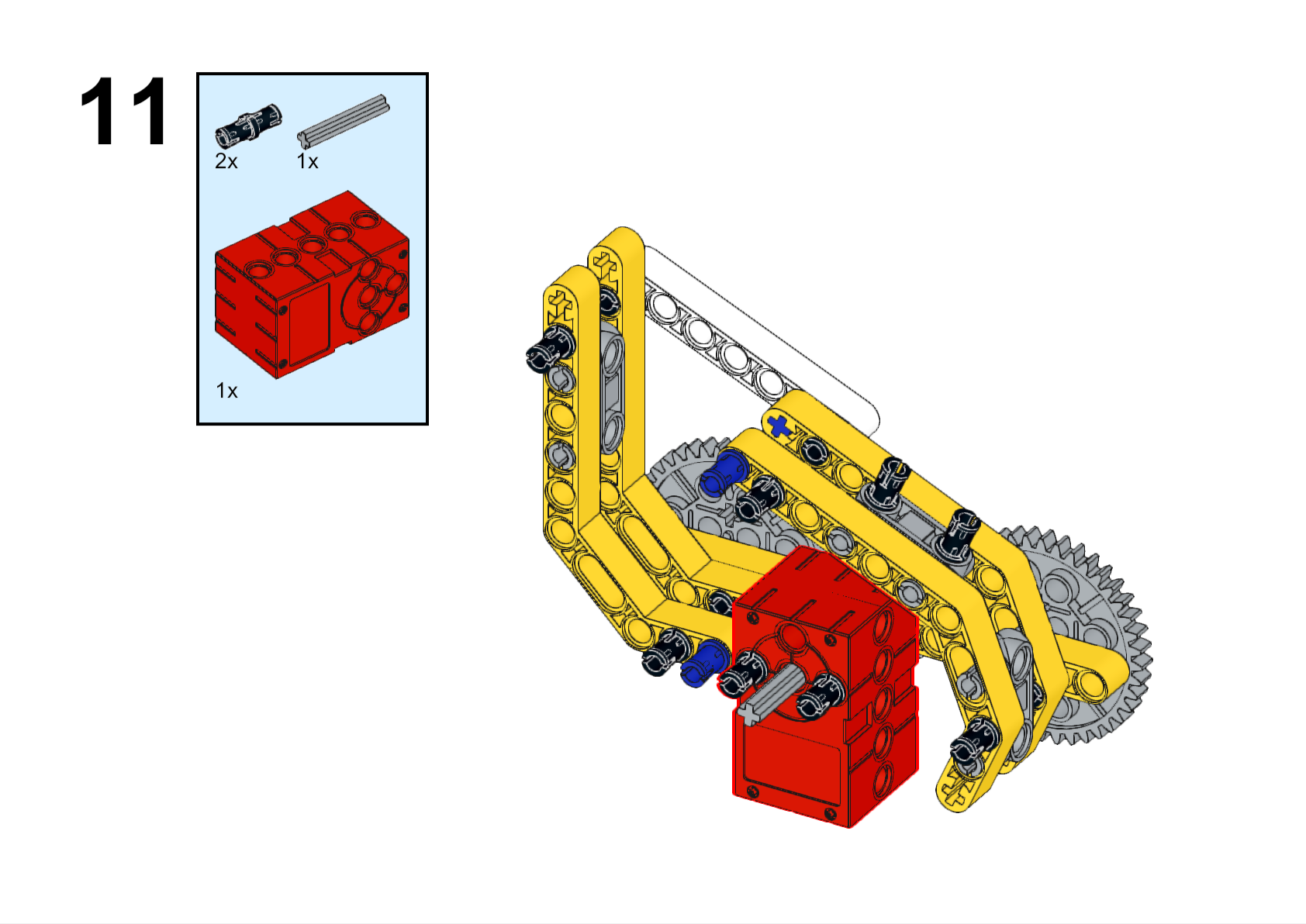
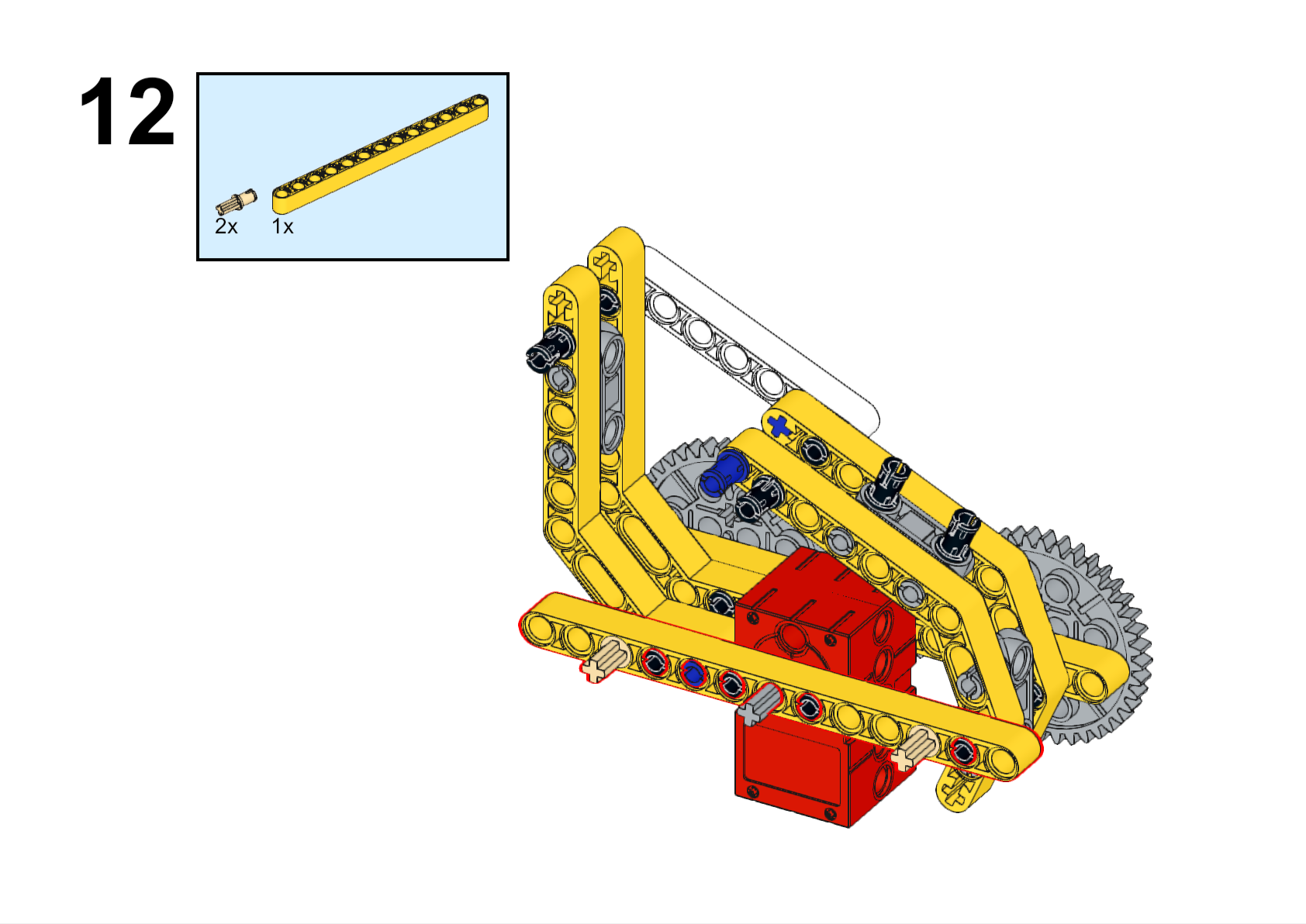
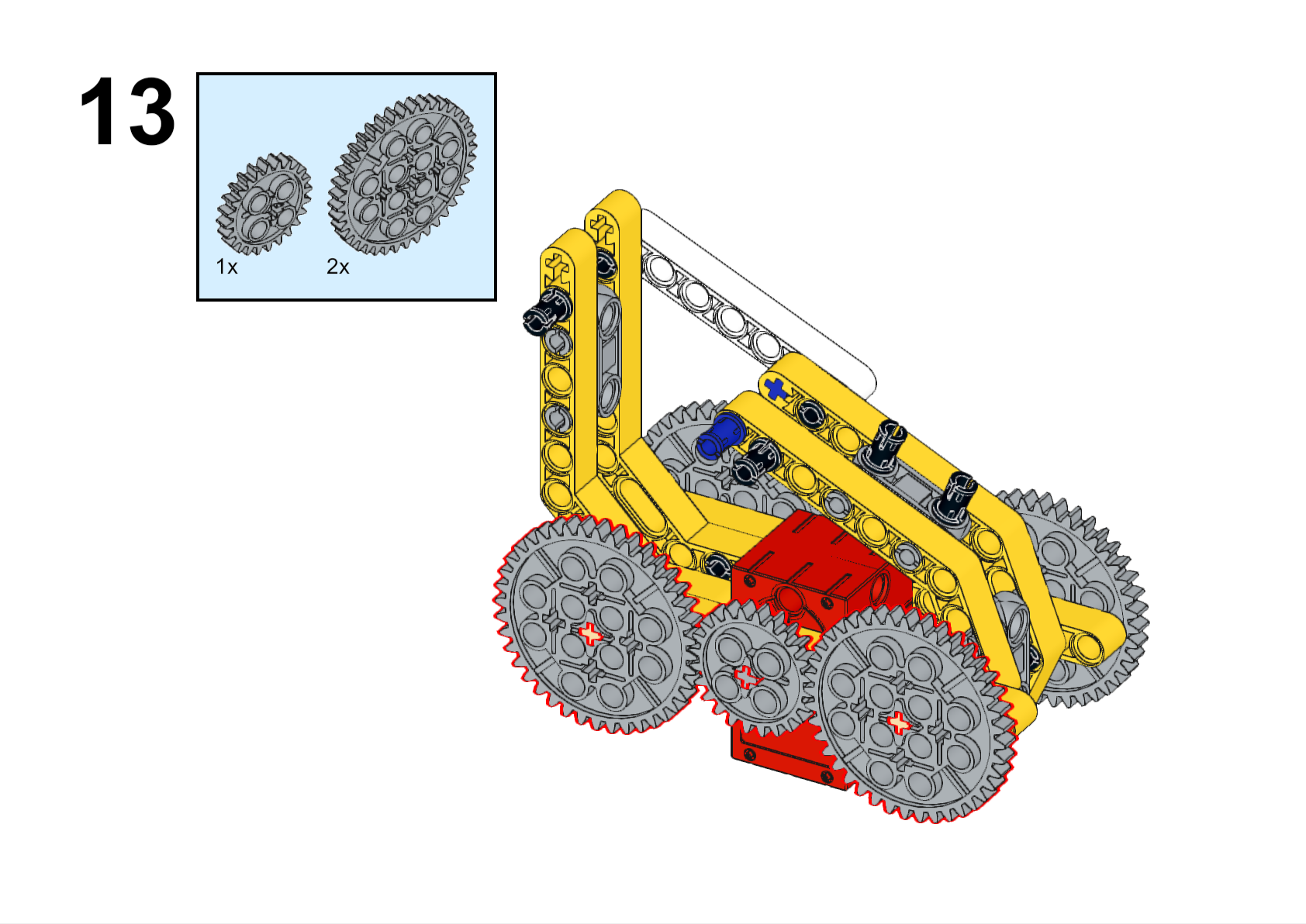
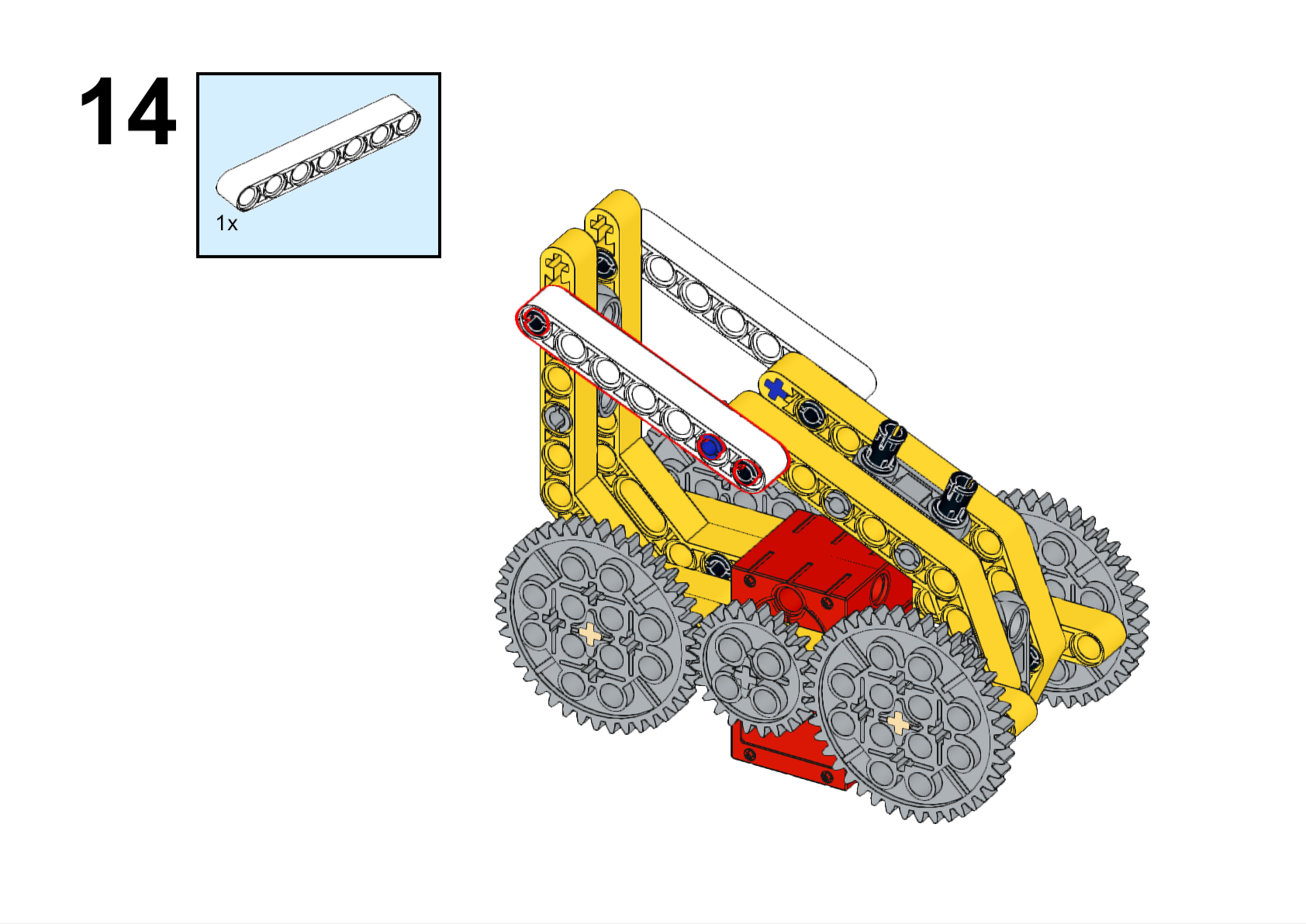
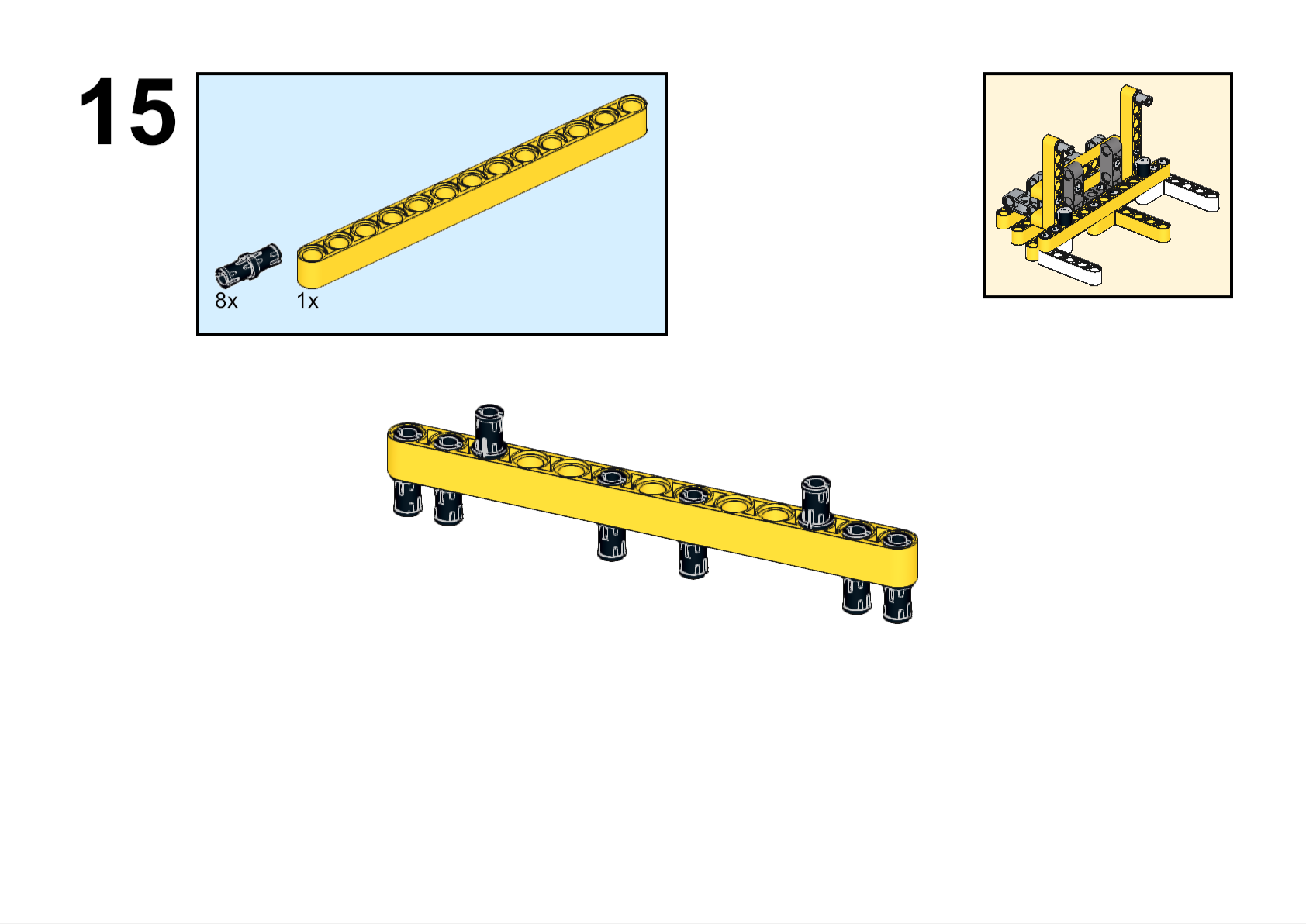
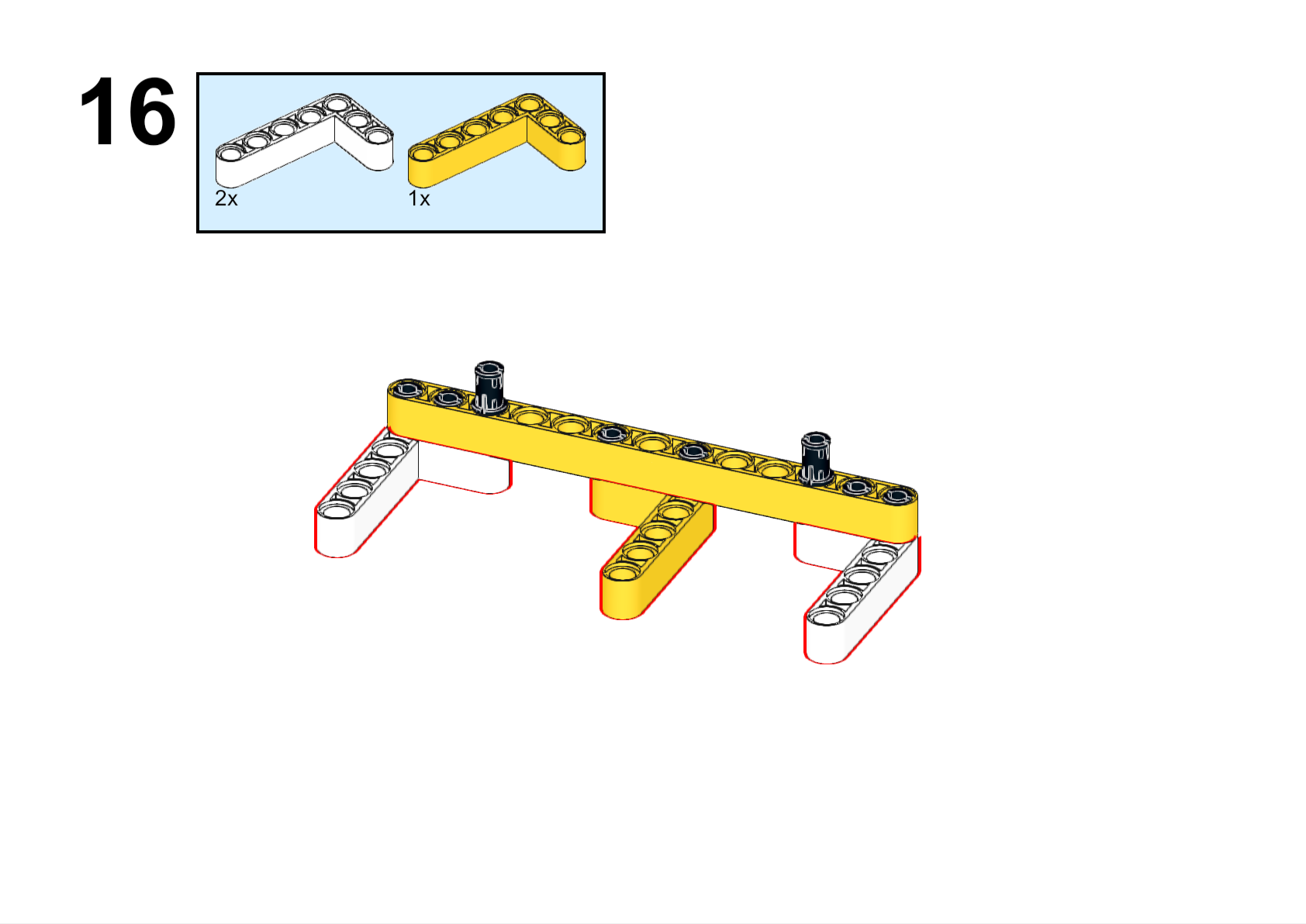
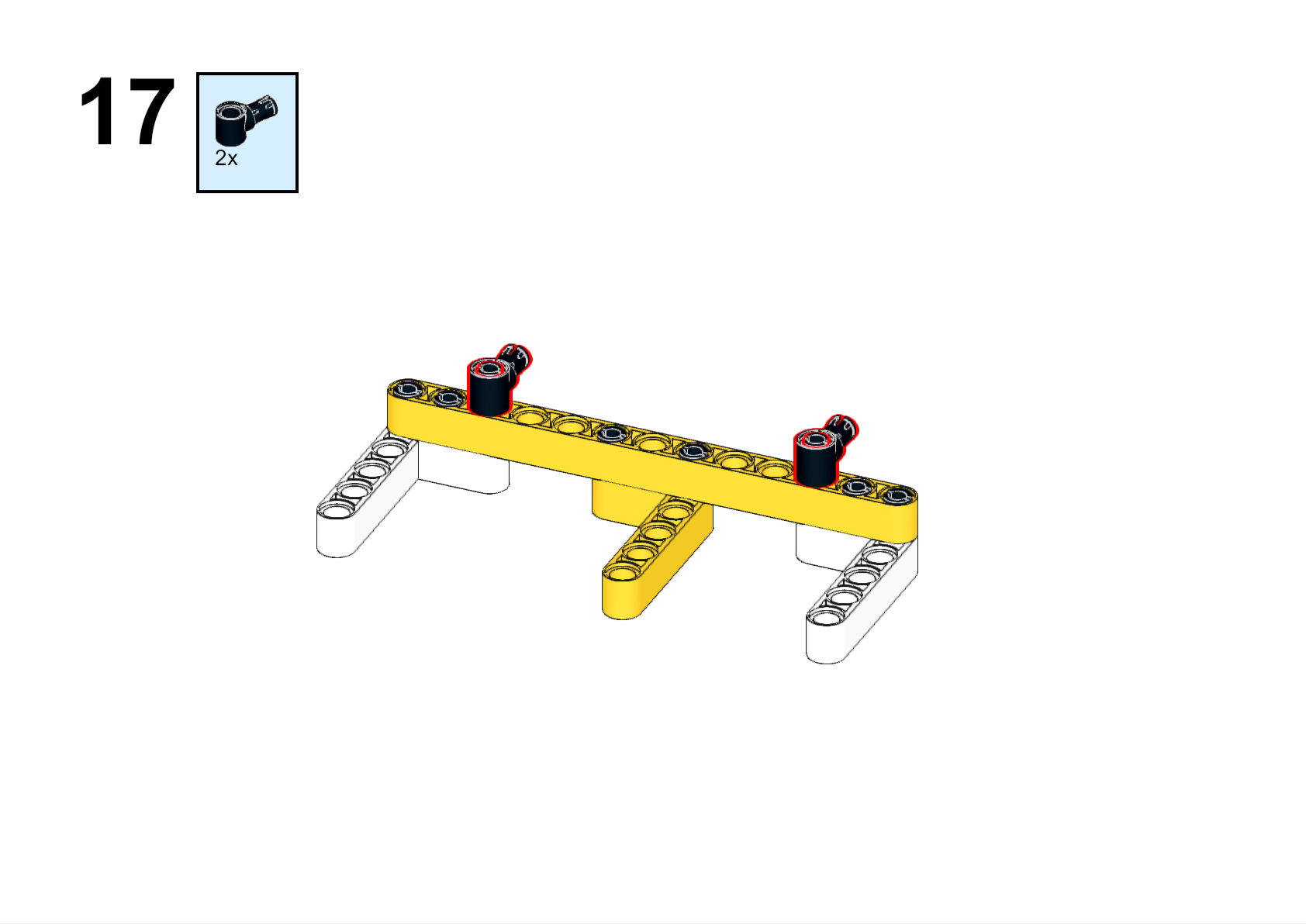
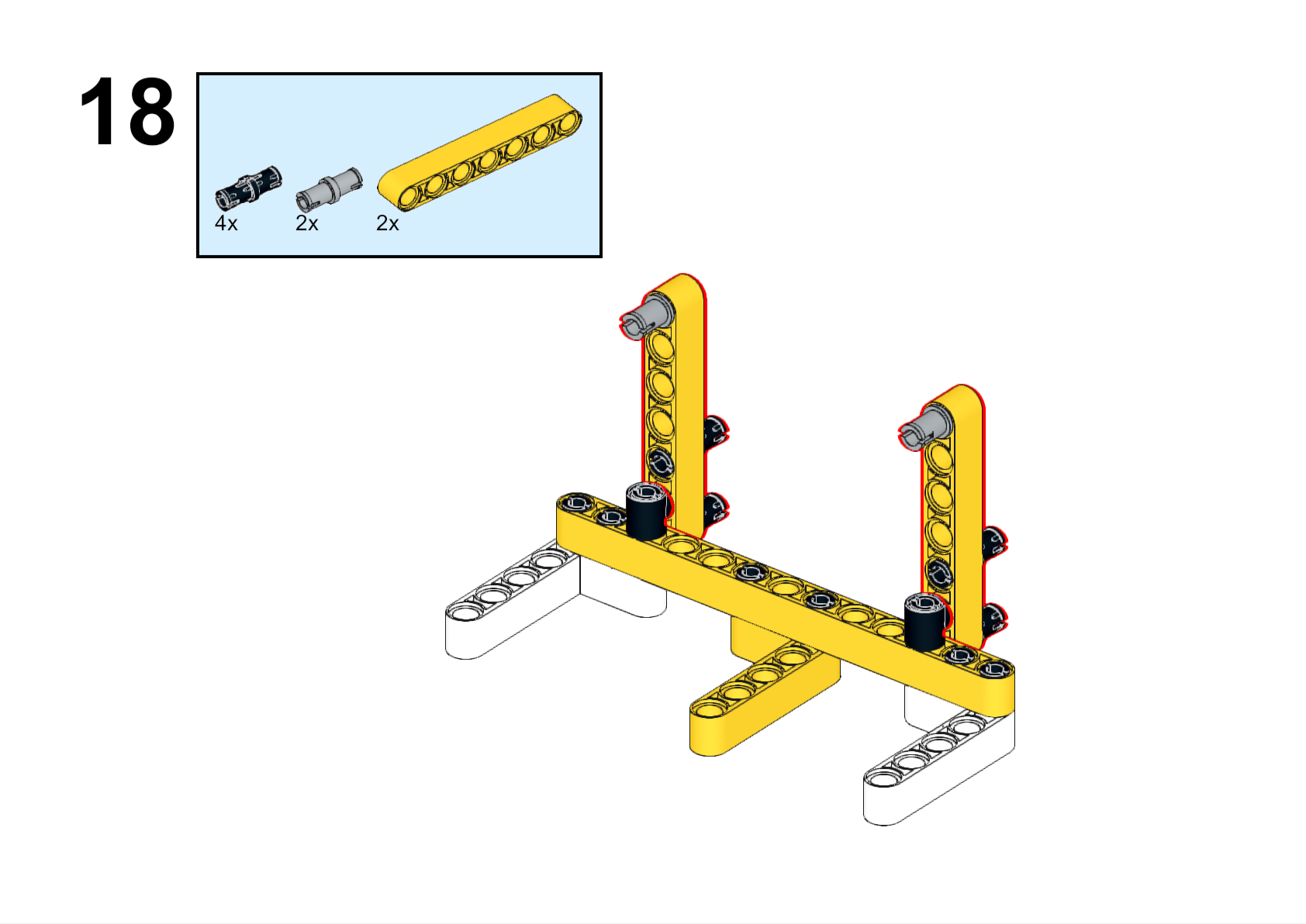
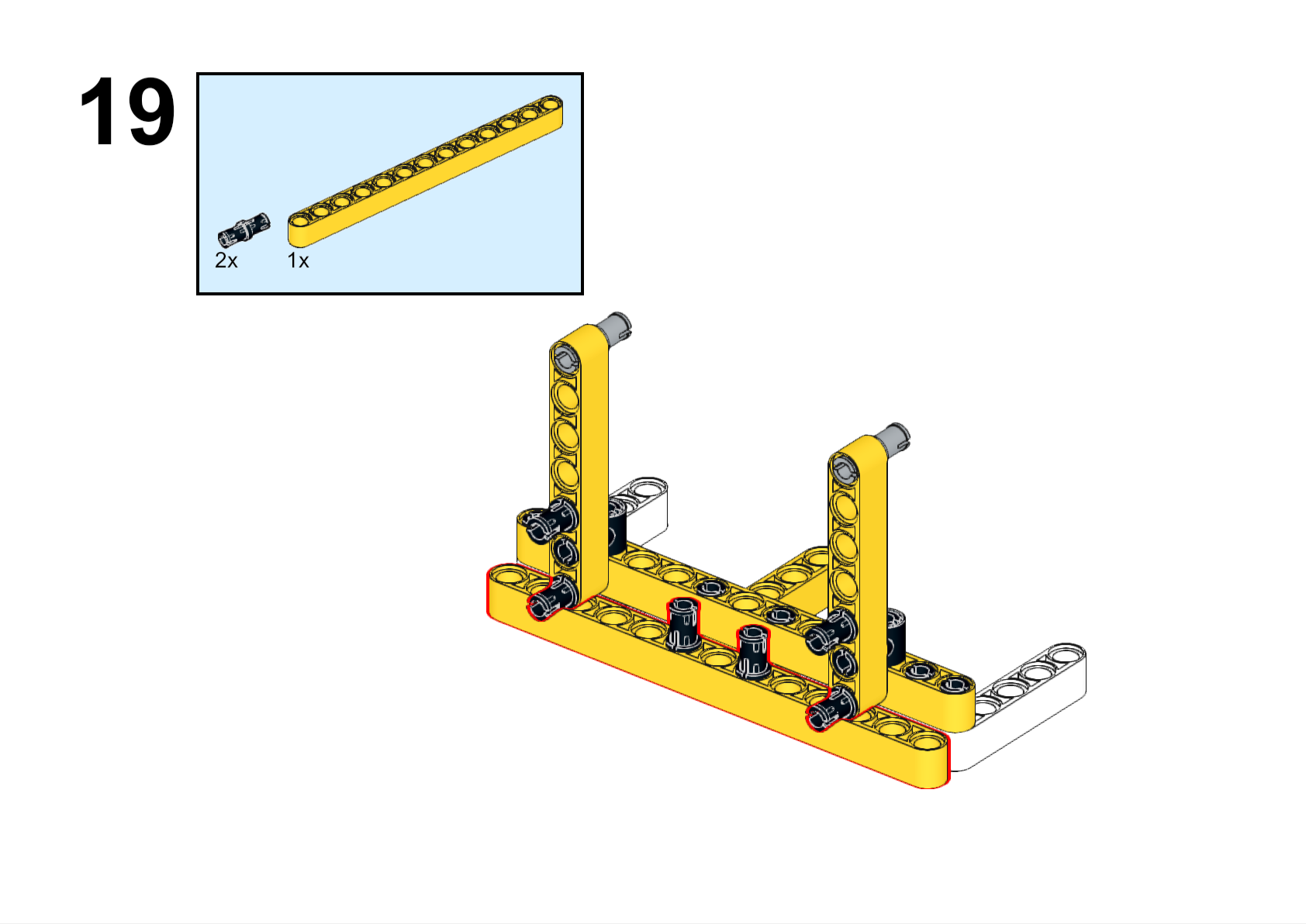
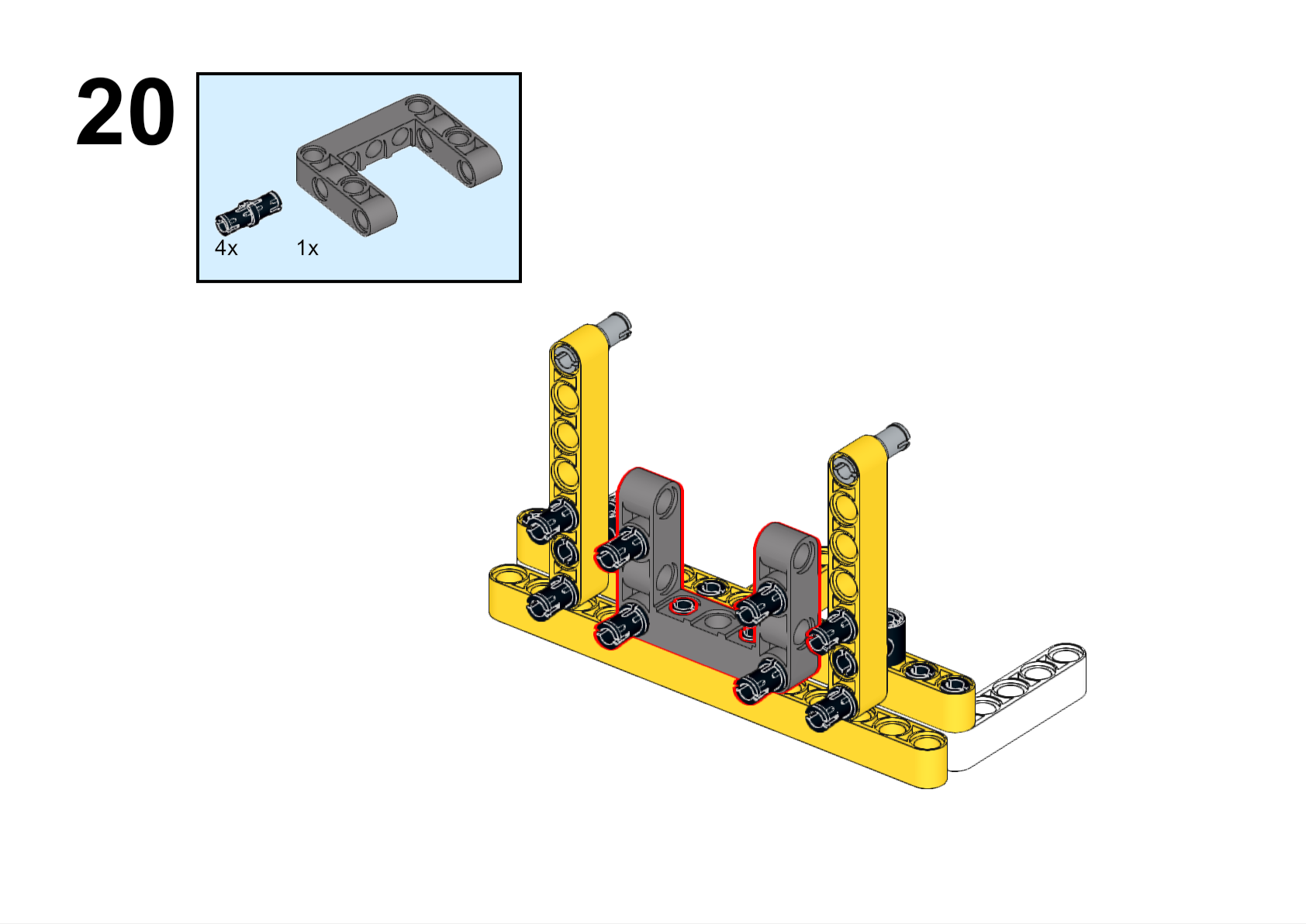
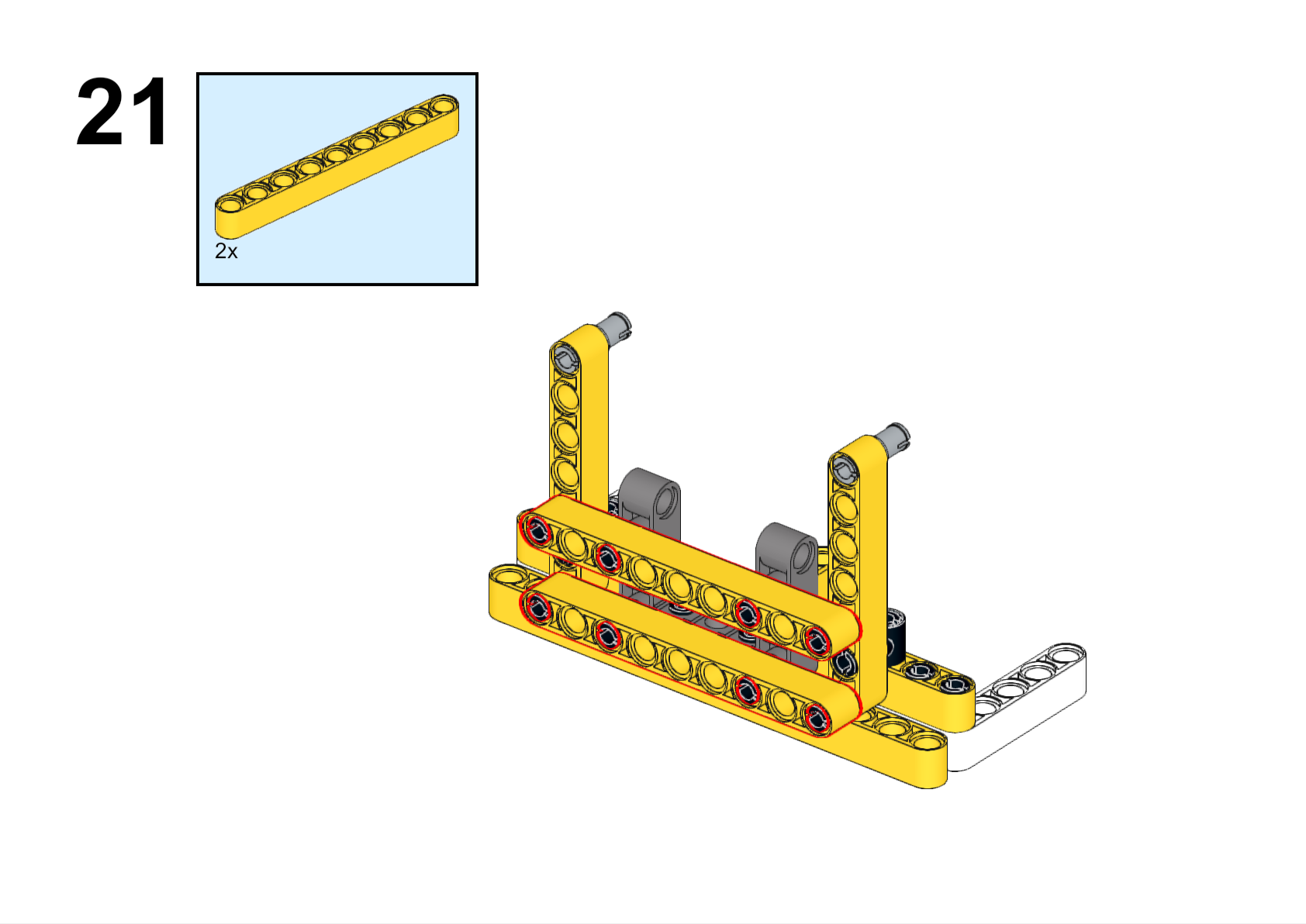
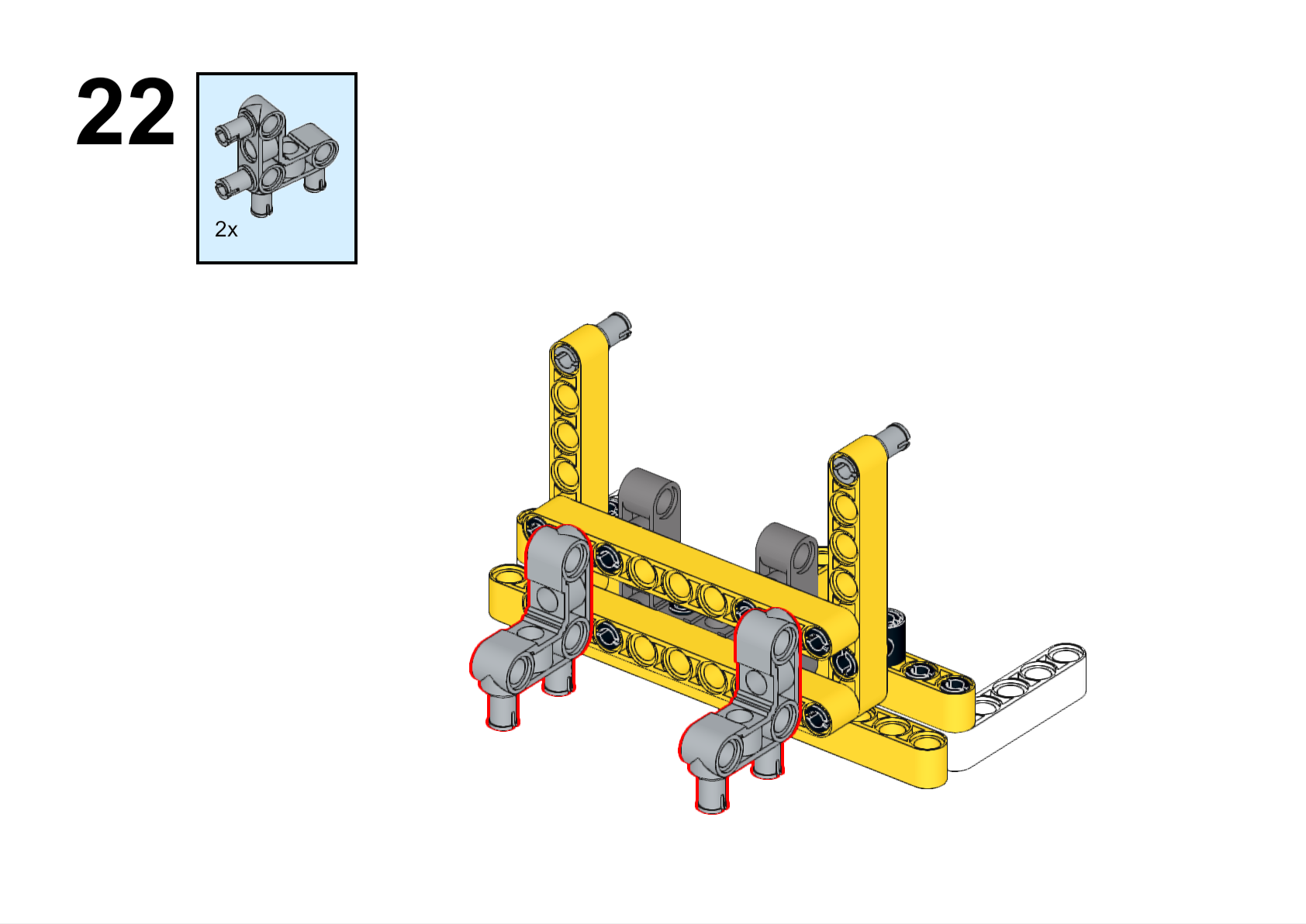
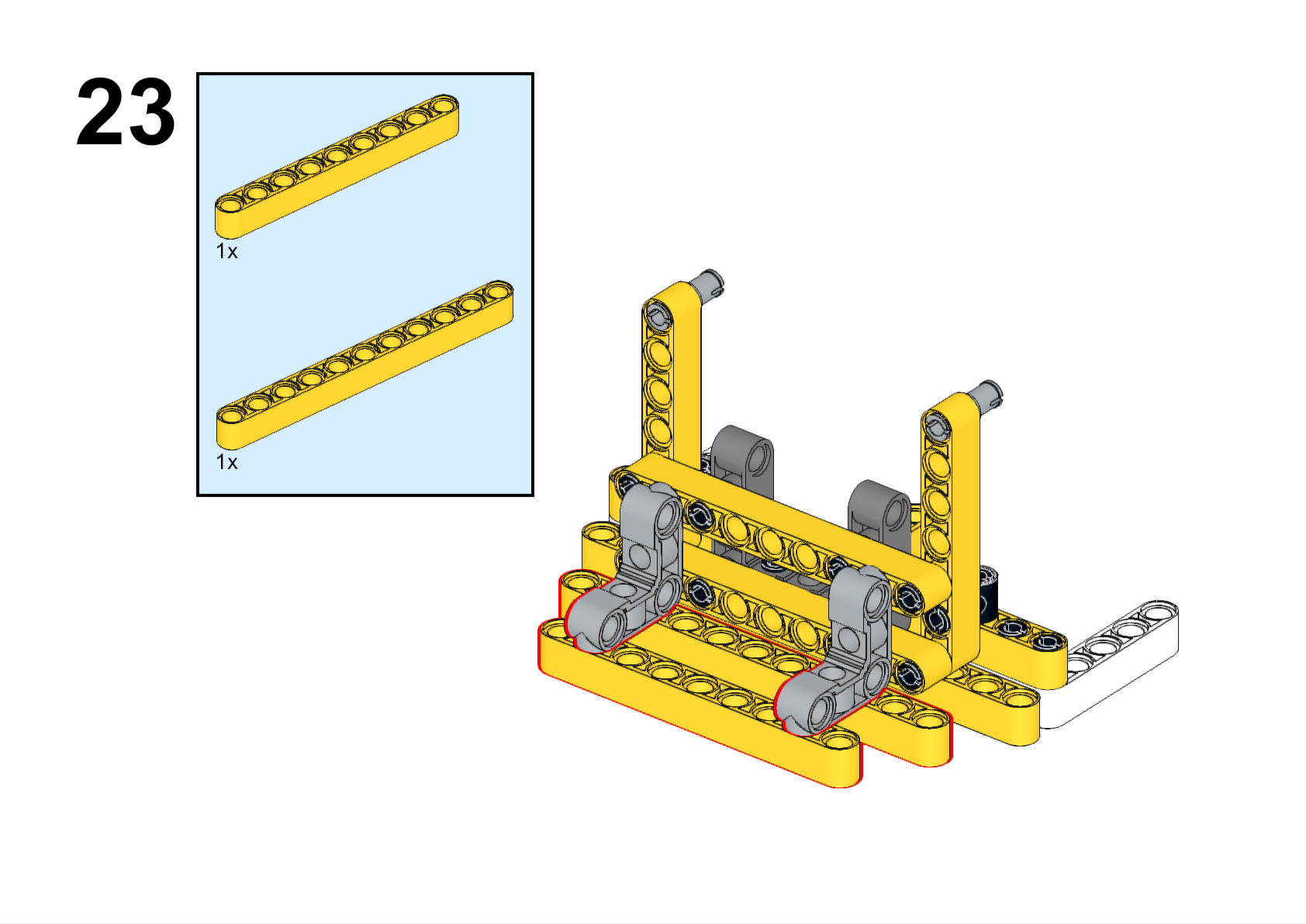
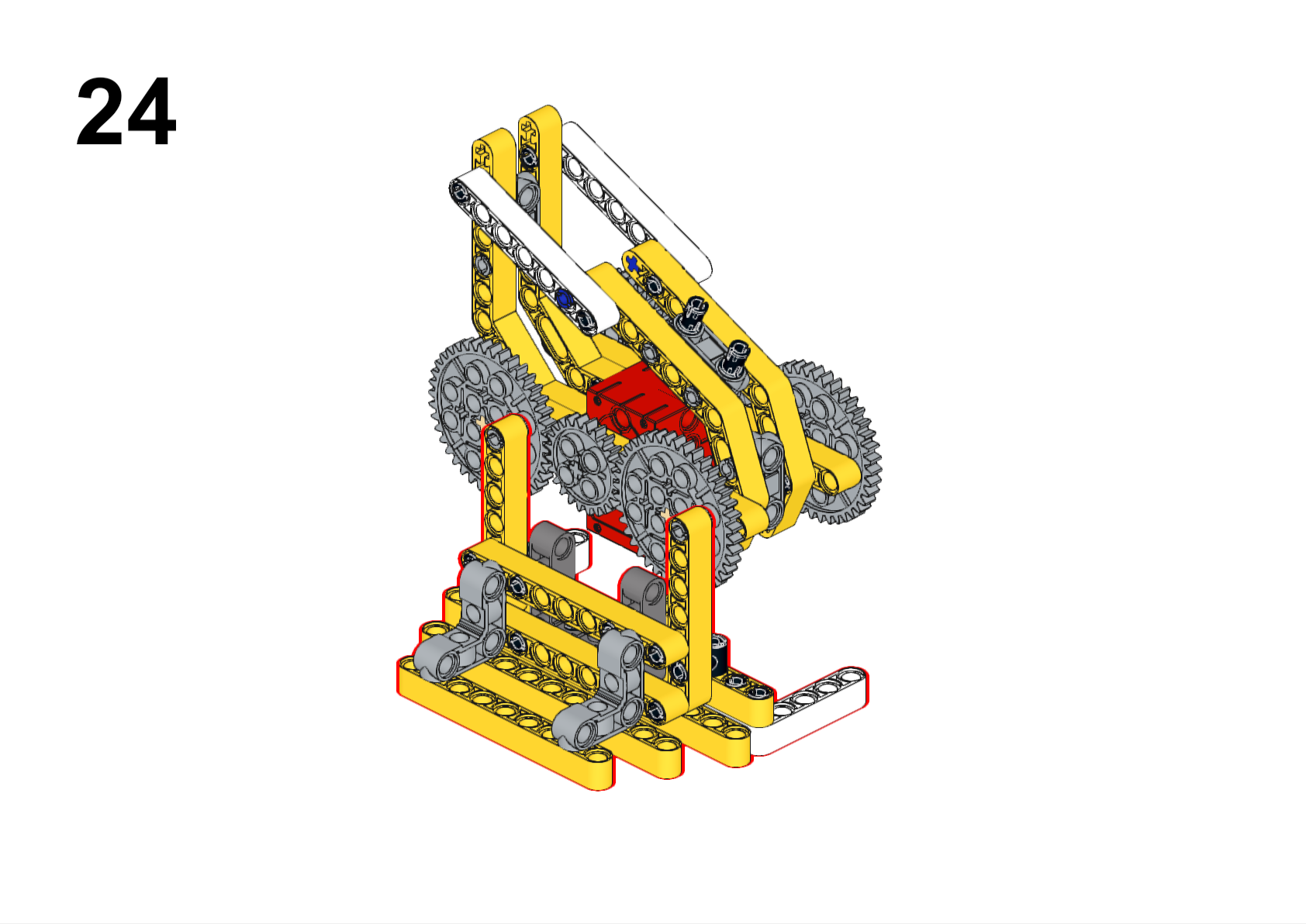
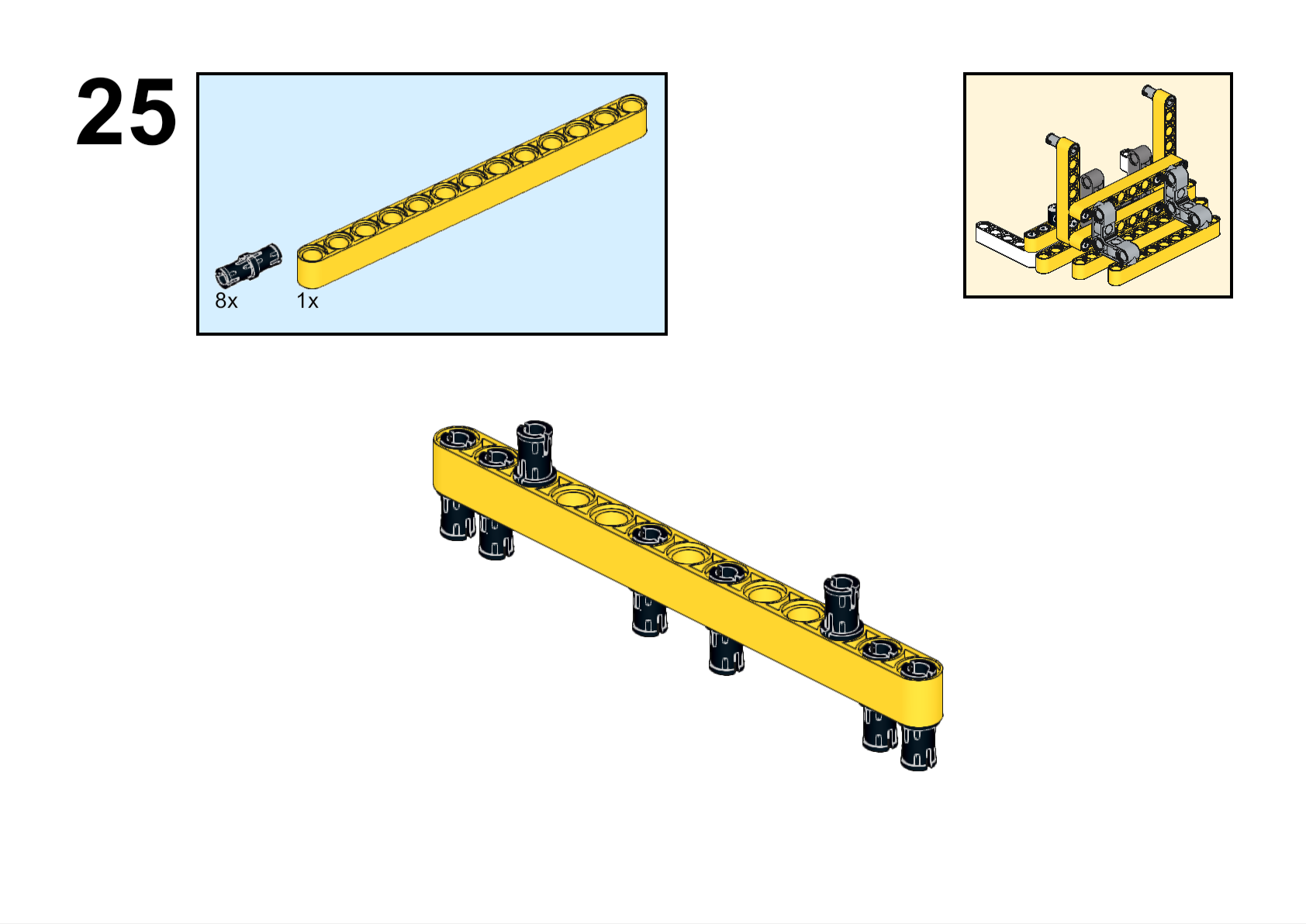
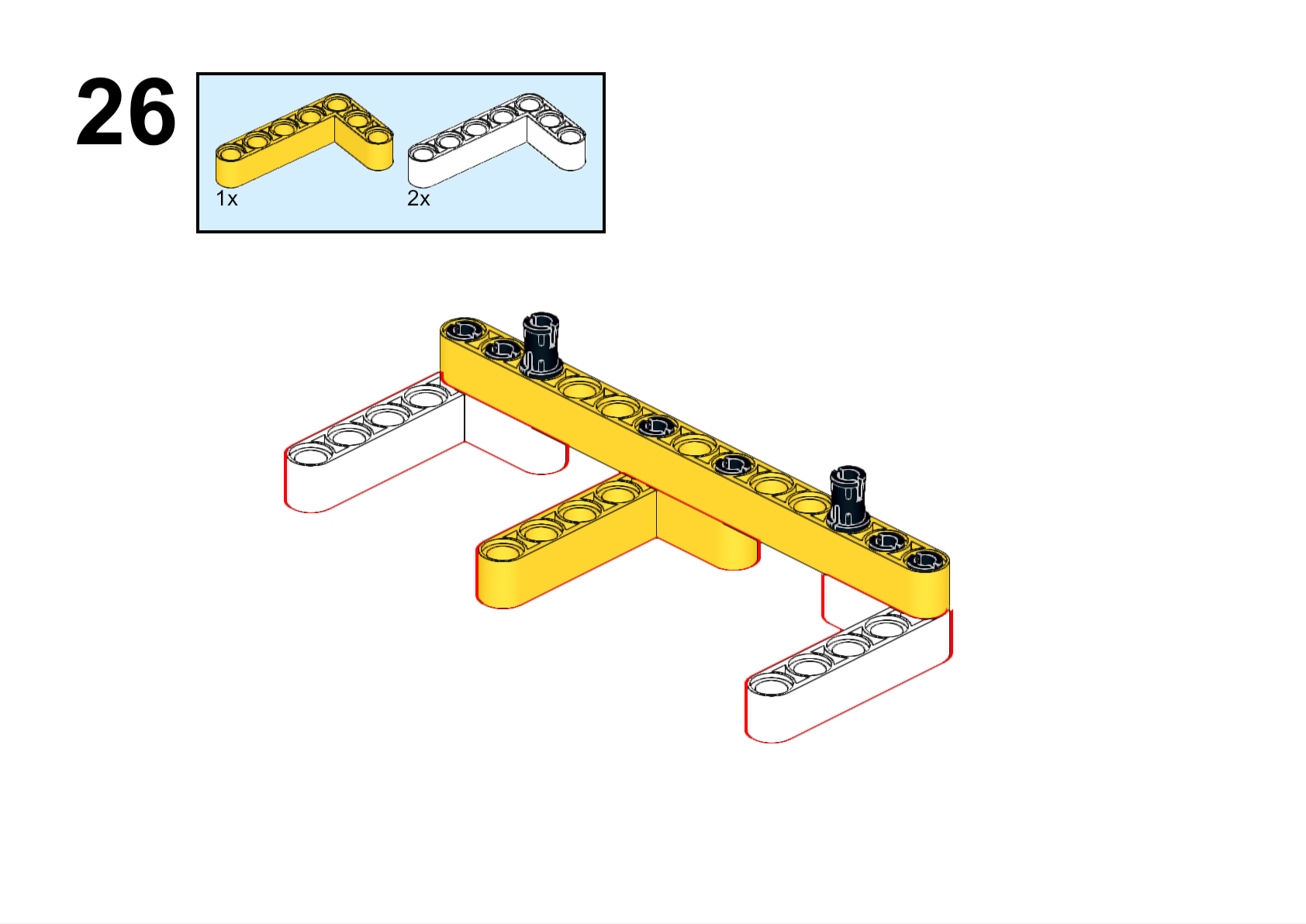
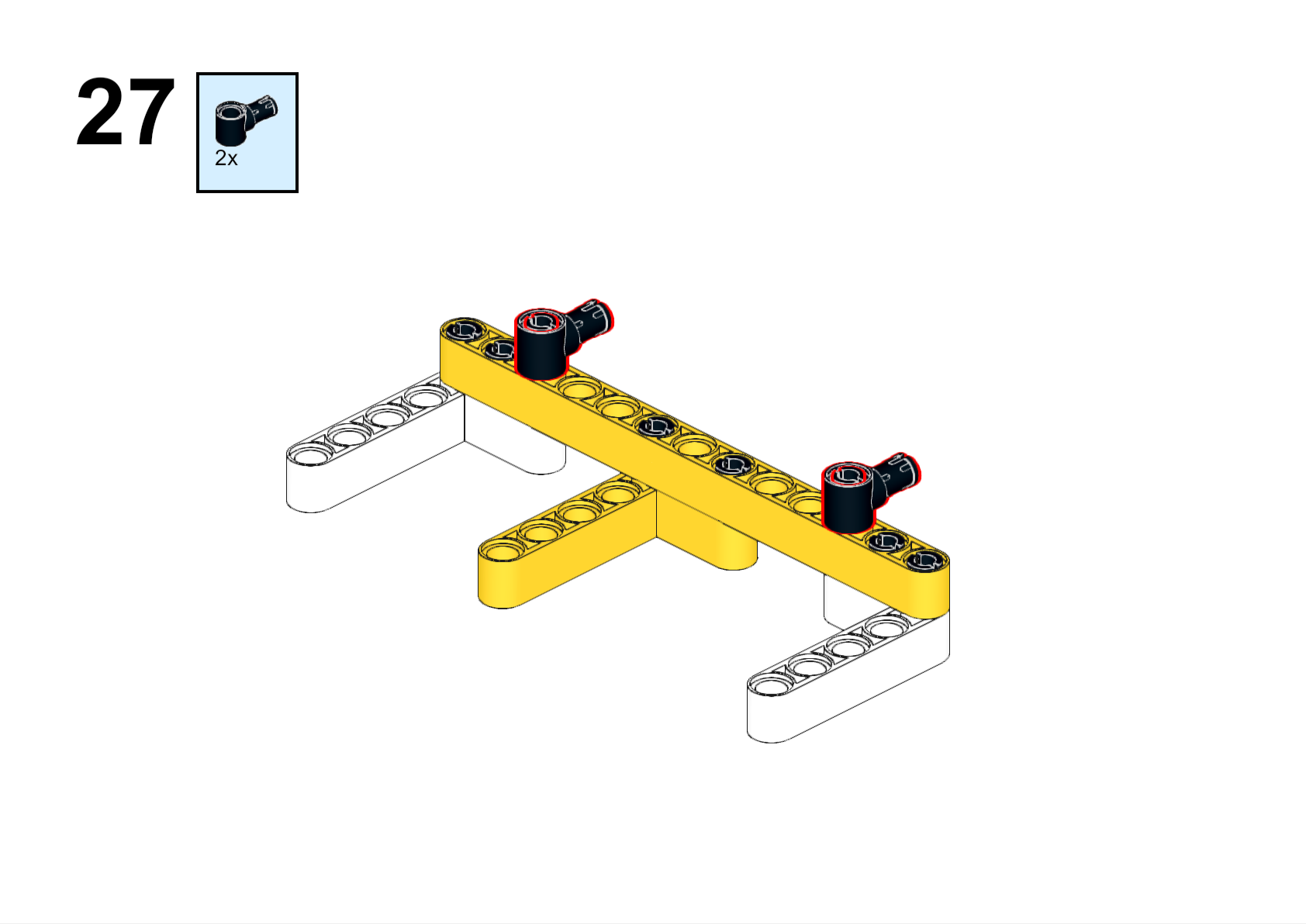
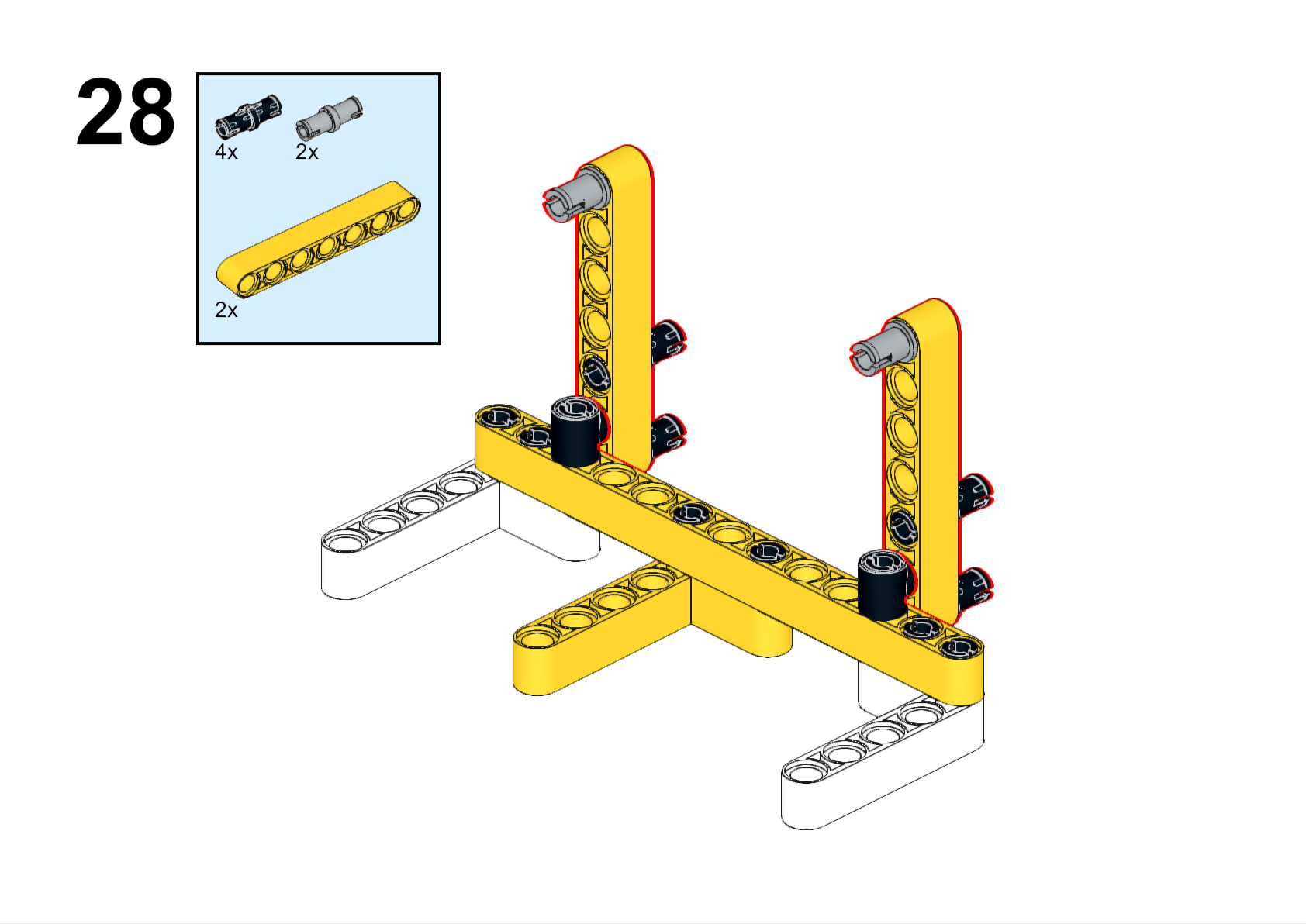
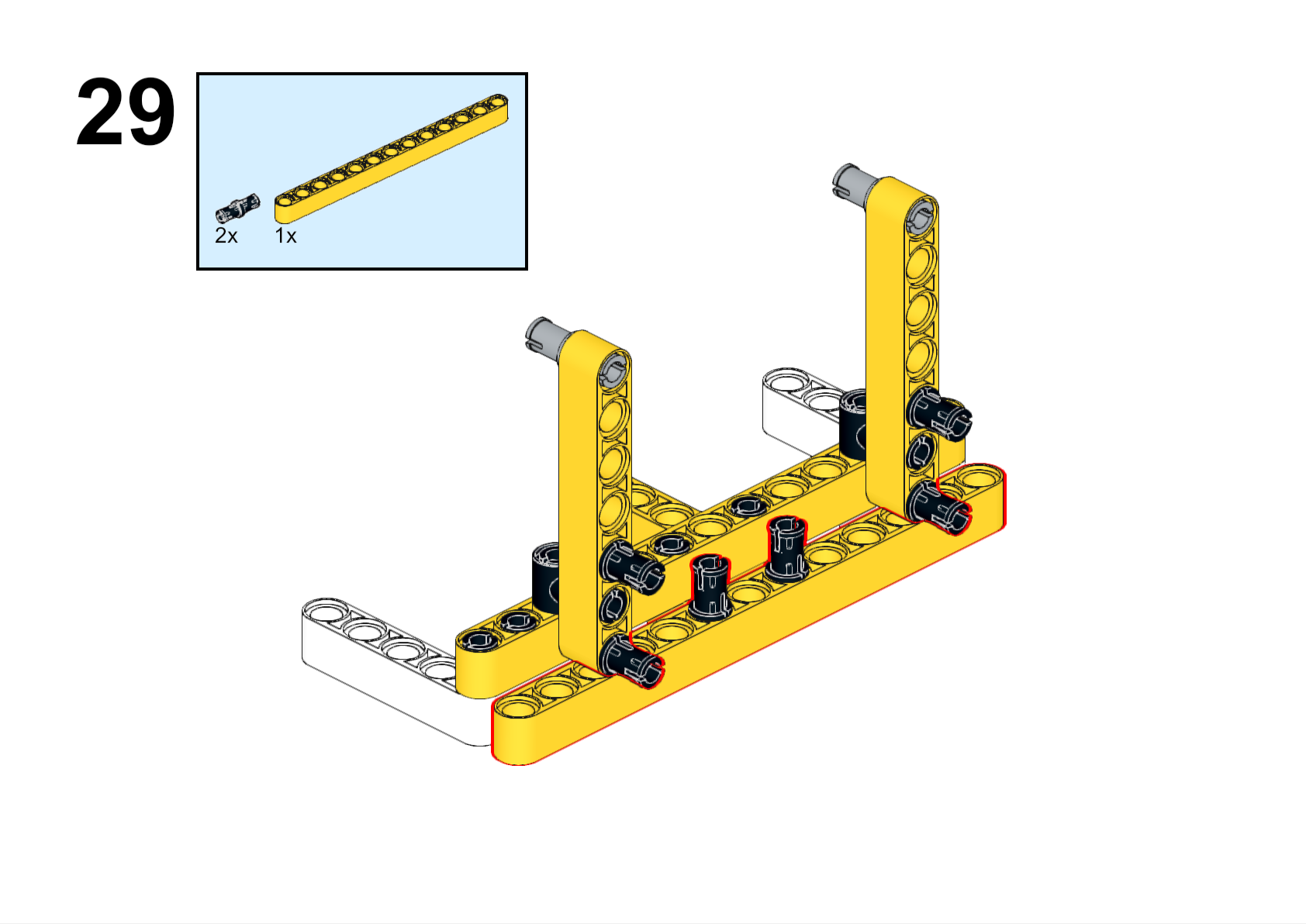
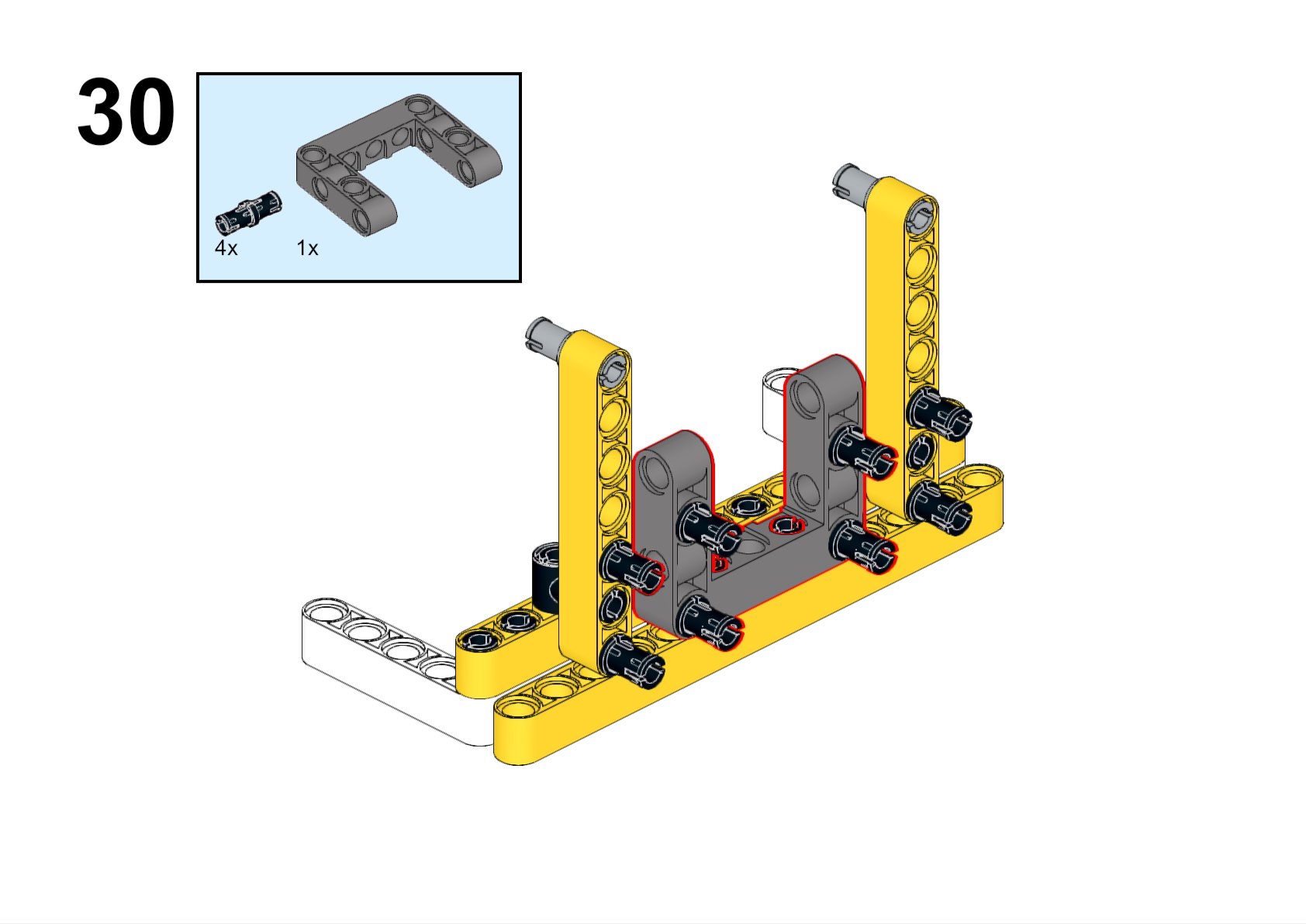
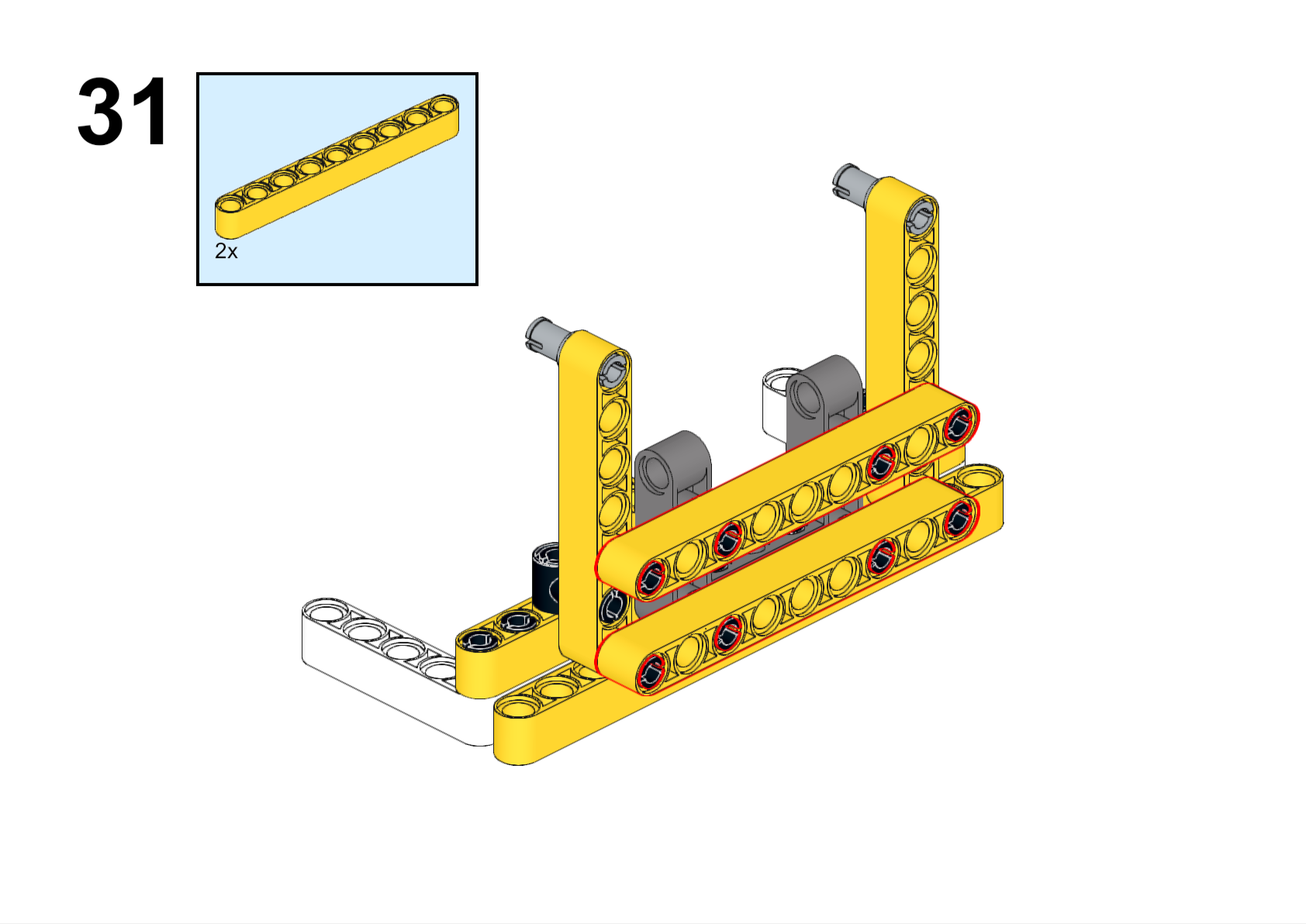
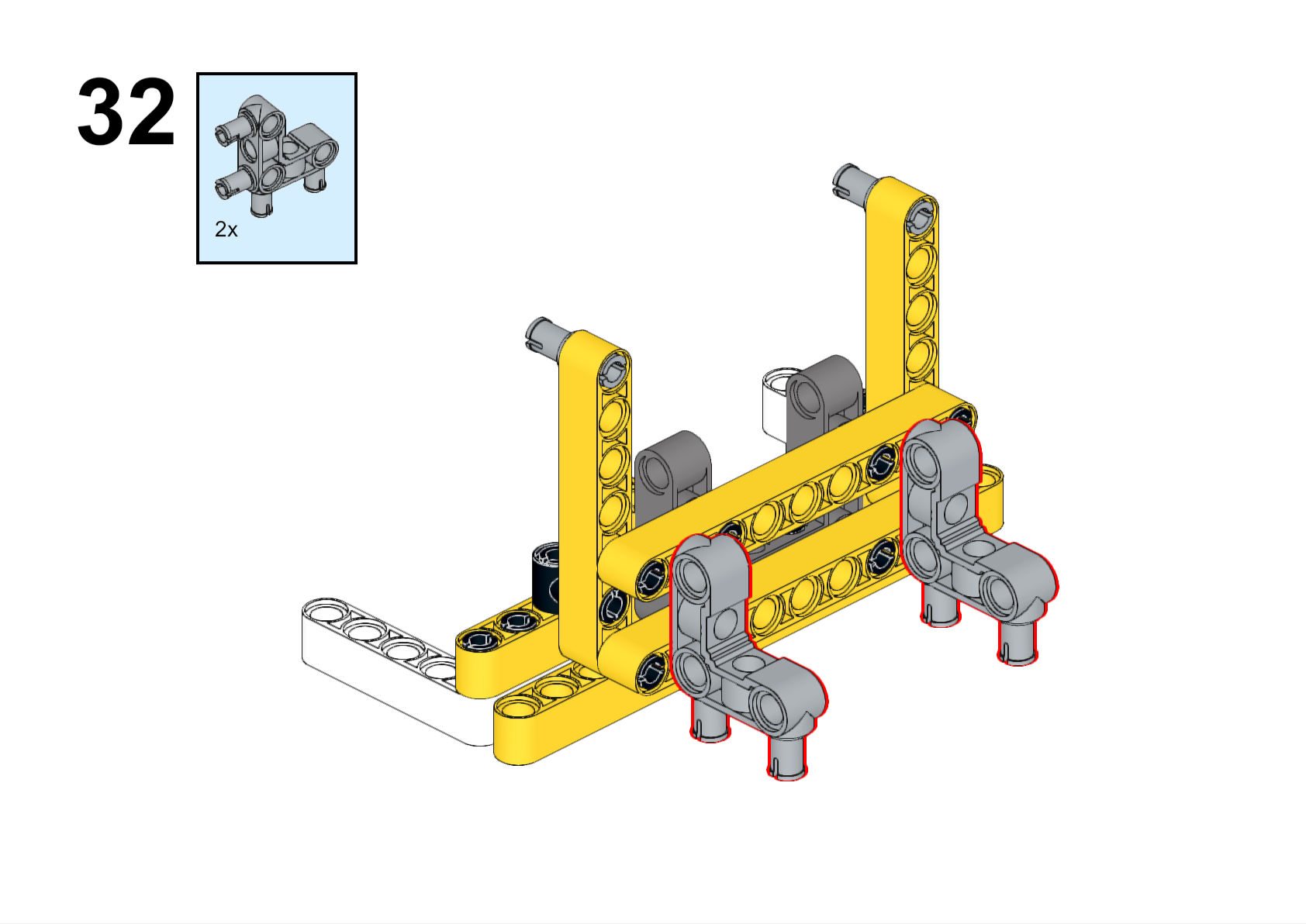
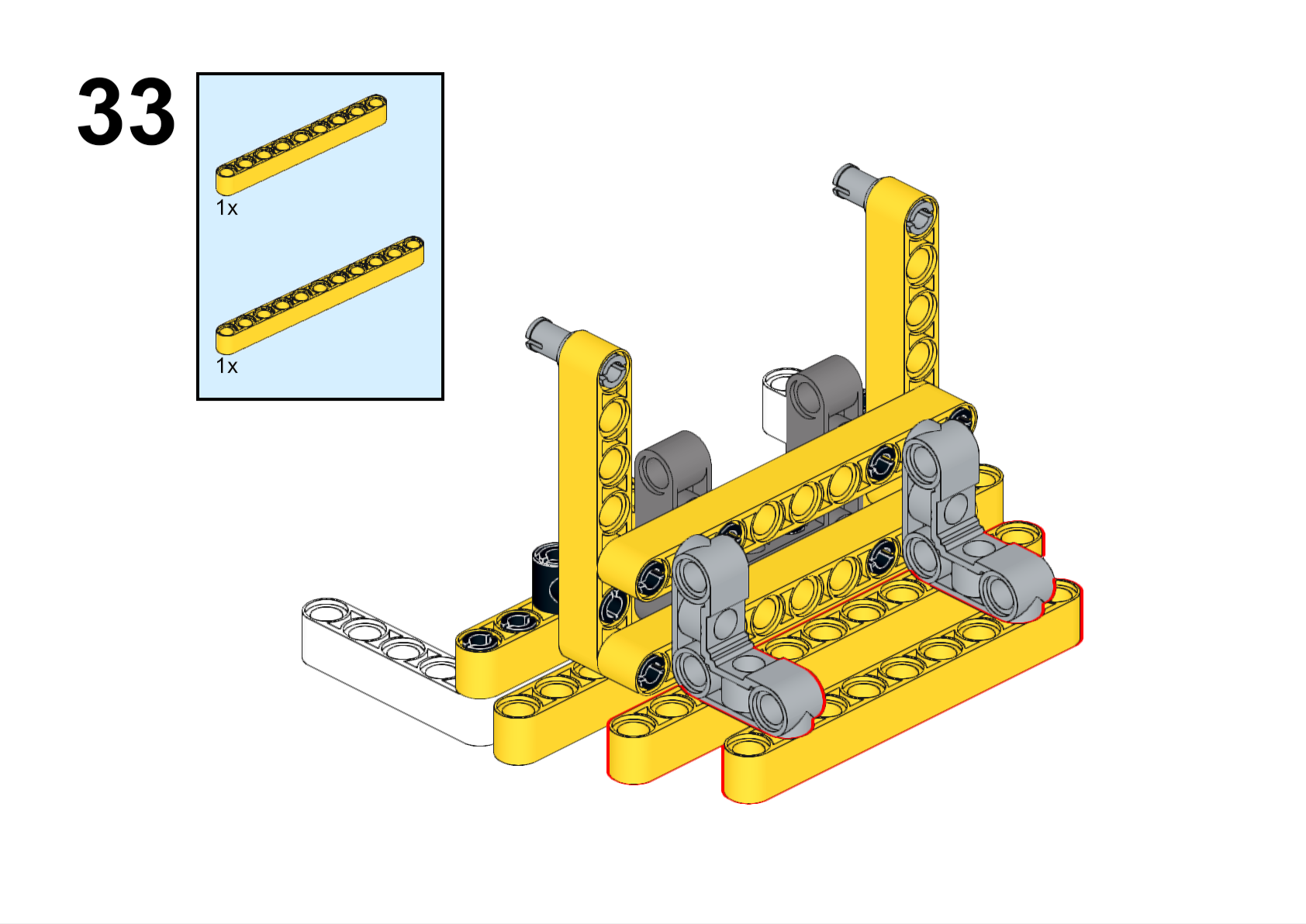
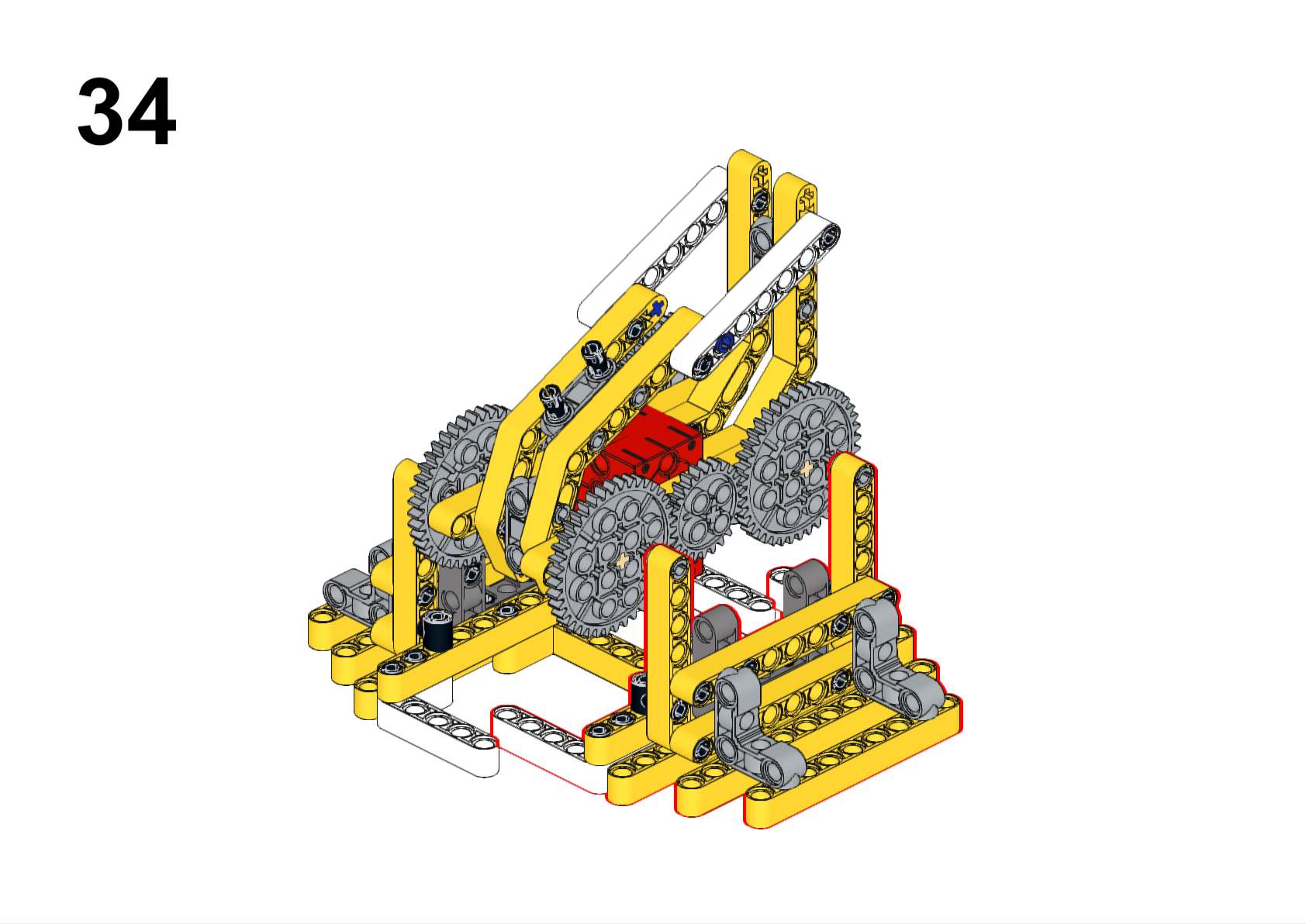
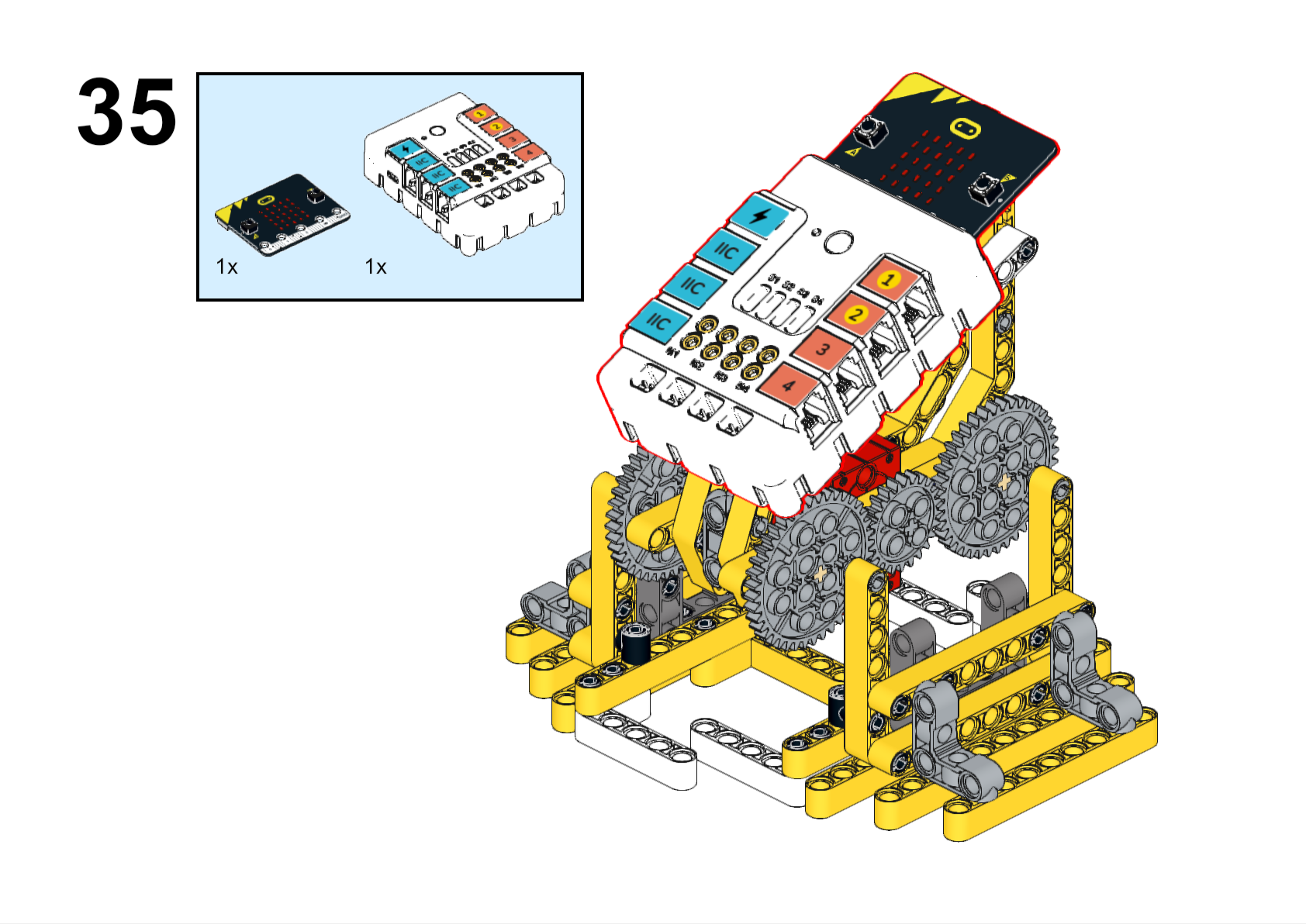
Building Steps
Completed
Hardware Connection
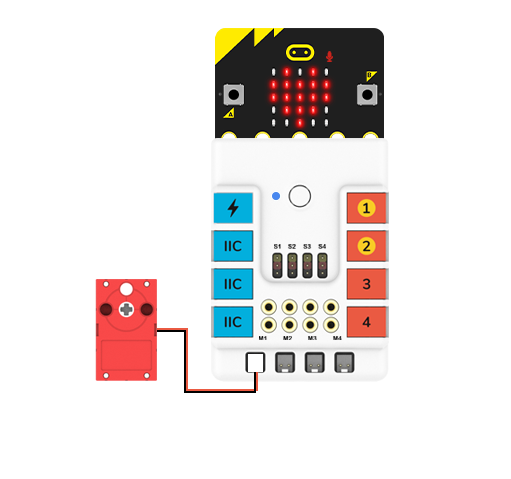
Connect the motor to the M1 connector of the Nezha expansion board.
Programming
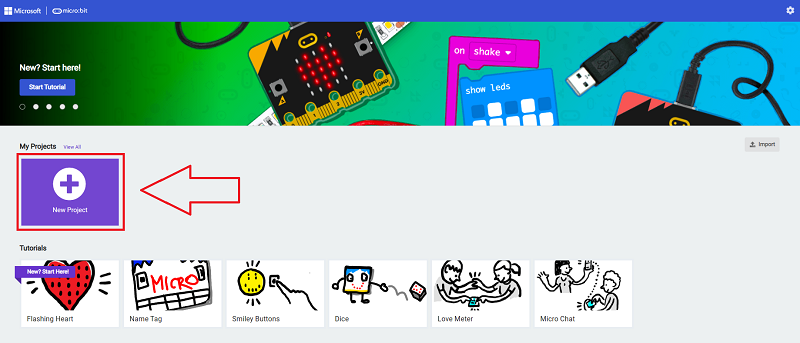
Go to makecode
Create new projects
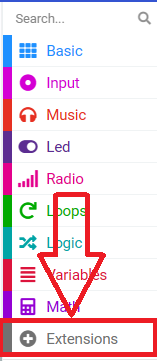
Click extensions
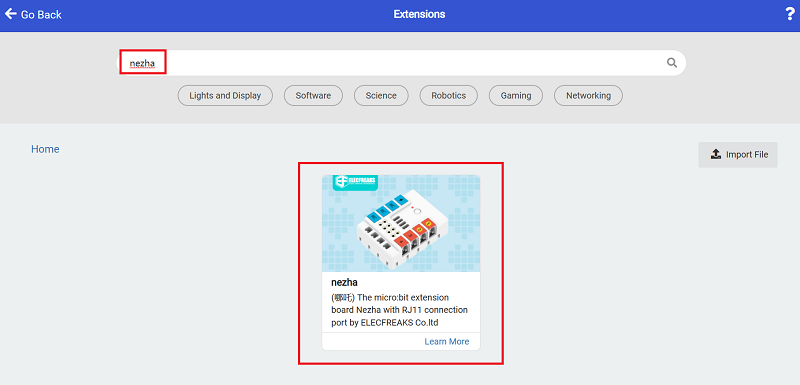
Search with nezha to download the package.
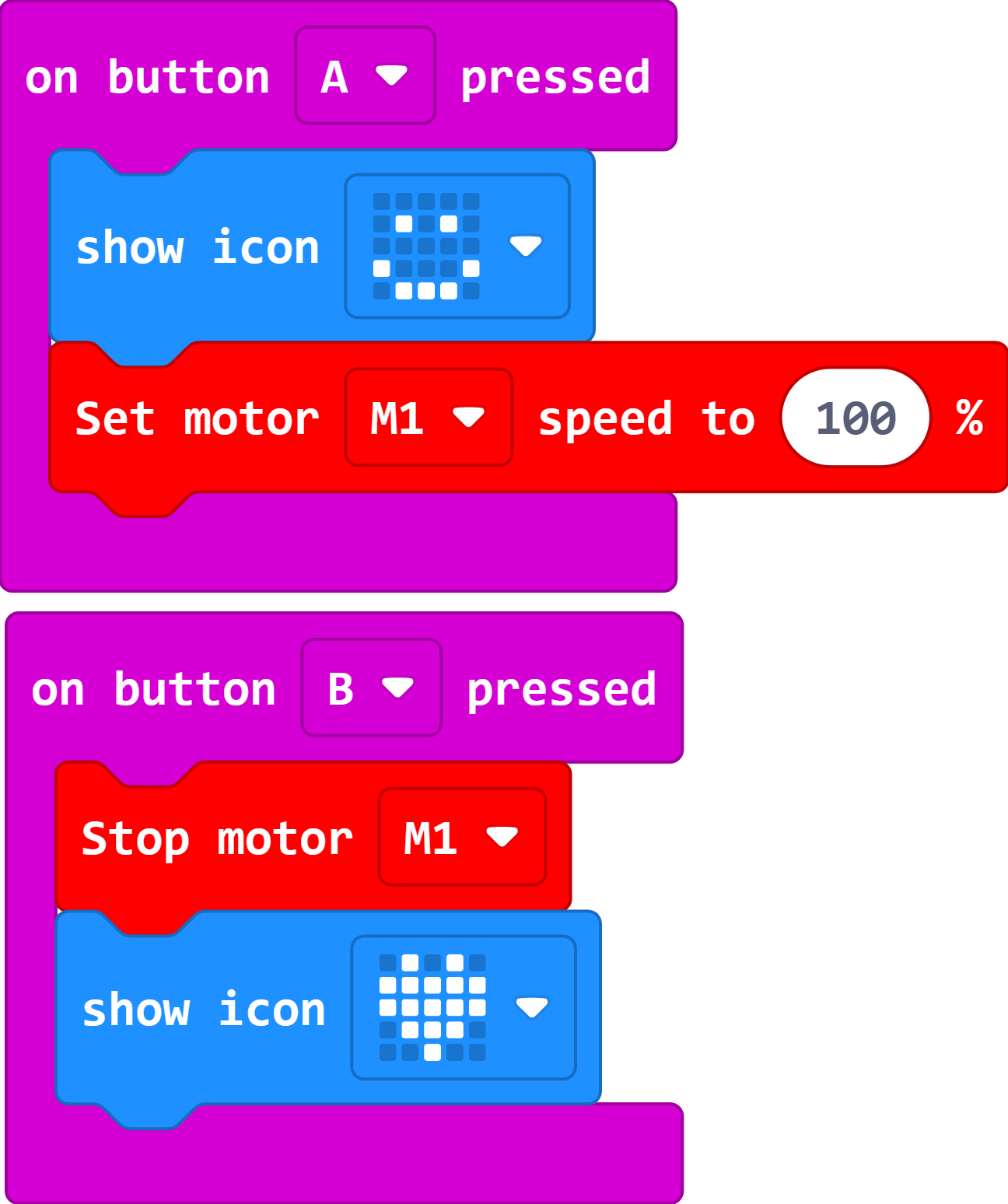
Code
Link: https://makecode.microbit.org/_i3CacvKkc40L
You may download it directly:
###Demonstration
Present in groups and compare the results and effectiveness of each group.
Result
Press A on the micro:bit for the robot to walk forward, press B on the micro:bit for the robot to stop walking.
Reflection
Share in groups so that students in each group can share their production process and insights, summarise the problems and solutions they encountered, and evaluate their strengths and weaknesses.