Case 05 Bravely cross the sky bridge
Introduction
In this course, we will lead students to explore the dynamic balance mechanism of bipedal robots in depth and master the principles of the six-axis inertial measurement unit (IMU) sensor. Through programming practice, students will learn how to control the opening and closing of the dynamic balance mode of XGO Rider, thereby improving its operational flexibility and stability.
Teaching objectives
- Understand the principles of the six-axis inertial measurement unit (IMU) sensor.
- Learn the programming instructions for opening and closing the dynamic balance mode of XGO Rider.
Teaching preparation
Before starting teaching, please make sure you have prepared the following necessary materials:
 | micro:bit V2 |
|---|---|
 | XGO-Rider |
 | USB Cable |
 | PC |
These materials will provide you with a complete experience and ensure that you can smoothly carry out subsequent operations and learning. If you are ready for the above, we can proceed to the next step.
 After XGO Rider is turned on, in order to keep the fuselage balanced, it needs to move back and forth slightly. Please do not place XGO Rider on the edge of the table or in a dangerous place to avoid damage.
After XGO Rider is turned on, in order to keep the fuselage balanced, it needs to move back and forth slightly. Please do not place XGO Rider on the edge of the table or in a dangerous place to avoid damage.
Teaching process
Course introduction
With the development of technology, the dynamic balance control of bipedal robots has become increasingly important. In this class, you will learn how the six-axis IMU sensor monitors the robot's posture and programmatically controls the balance mode. This will deepen your understanding of robot kinematics and improve your operating skills. Through practice, you will ensure that XGO Rider operates stably in different environments, whether it is flat or complex terrain.
Exploration Activities
How does a bipedal robot maintain its balance?
How to start or stop the dynamic balance function of XGO Rider through programming?
Is there a more efficient way to ensure the balance of a bipedal robot?
Start Programming
Add XGO Rider Software Library
1. Go to "makecode.microbit.org" and click New Project.

2. Enter the project name in the pop-up window and click Create.

3. Click Extension in the code drawer, enter XGO Rider in the search box on the pop-up interface and click the search icon. Click it after the XGO Rider software library is displayed.

Sample Program
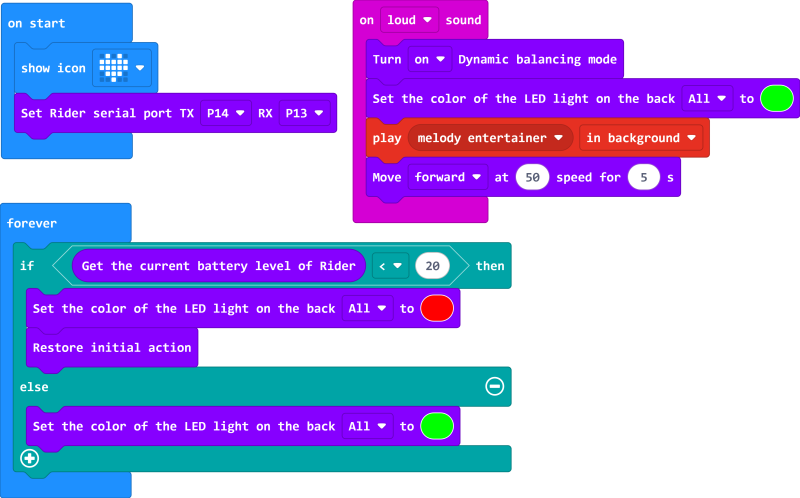
Reference Program Link: https://makecode.microbit.org/_UiLekADsvUMf
 Because XGO Rider has forward and backward movement in the performance mode, please place XGO Rider on a spacious flat ground.
Because XGO Rider has forward and backward movement in the performance mode, please place XGO Rider on a spacious flat ground.
Download Program
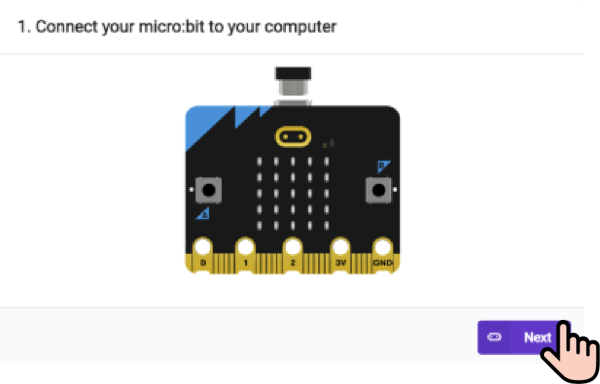
1. Use a USB cable to connect PC and micro:bit V2.

2. After the connection is successful, a drive letter named MICROBIT will be recognized on the computer.

3. Click  in the lower left corner and select Connect Device.
in the lower left corner and select Connect Device.

4. Click 。
。
5. Click  。
。
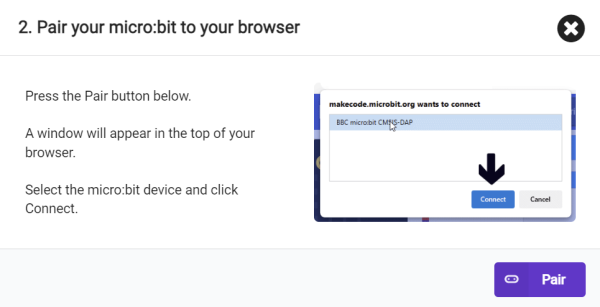
6. Select BBC micro:bit CMSIS-DAP in the pop-up window, and then select Connect. Now our micro:bit has been successfully connected.

7. Click Download Program.

Teamwork and Presentation
Students are divided into groups to complete the programming of the two modes of switching between the dynamic balance mode of XGO Rider on and off.
Encourage students to cooperate, communicate and share experiences with each other.
Each group has the opportunity to show their programmed XGO Rider to other groups and demonstrate.
Expected results:

Summary and reflection
Review the course content and remind students what knowledge and skills they have mastered?
Guide students to discuss the problems and difficulties they encountered during the production process and how to solve these problems.
Guide students to think and discuss together how to more effectively ensure the balance of bipedal robots.
Expand knowledge
IMU, or Inertial Measurement Unit, is a device used to measure and report a specific force, angular velocity, and in some cases, the direction of an object around a magnetic field. IMU usually consists of the following main parts:
Accelerometer: Measures linear acceleration along one or more axes.
Gyroscope: Measures angular velocity around one or more axes.
Magnetometer: Measures the direction of the Earth's magnetic field and is used to determine the absolute or relative orientation of an object.
IMU sensors are useful in a variety of applications, including but not limited to:
Aerospace: Used in aircraft navigation systems to help determine the precise position, speed, and orientation of the aircraft.
Robotics: Helps robots understand their position and motion in space, which is especially important for walking robots because they need to maintain balance and navigate.
Automotive: Used in dynamic stability control systems in vehicles, such as anti-lock braking systems (ABS) and electronic stability programs (ESP).
Smartphones and wearable devices: Used for motion detection, direction perception, and user interface interaction.
Virtual Reality (VR) and Augmented Reality (AR): Used for head tracking to provide a more natural and immersive user experience.
IMU sensors can provide real-time data, which is critical for systems that require fast responses. However, the data from IMU sensors usually needs to be fused and corrected through complex algorithms to improve the accuracy and reliability of the measurements.