案例05 勇闯天桥
简介
在本课程中,我们将引领学生深入探索双足机器人的动态平衡机制,并掌握六轴惯性测量单元(IMU)传感器的原理。学生们将通过编程实践,学习如何控制 XGO Rider 动态平衡模式的打开与关闭,从而提升其操作的灵活性与稳定性。
教学目标
- 了解六轴惯性测量单元(IMU)传感器的原理。
- 学习 XGO Rider 动态平衡模式打开和关闭的编程指令。
教学准备
在开始教学之前,请确保您已经准备好以下必要的材料:
 | micro:bit V2 |
|---|---|
 | XGO-Rider 整机 |
 | USB 数据线 |
 | 个人电脑(PC) |
这些材料将为您提供一个完整的体验,确保您可以顺利地进行后续的操作和学习。如果您已准备好以上内容,我们可以继续进入下一步。
 XGO Rider 开机后,为保持机身平衡,需要小幅度来回移动,请不要将 XGO Rider 放在桌子边缘或者危险的地方,避免损坏。
XGO Rider 开机后,为保持机身平衡,需要小幅度来回移动,请不要将 XGO Rider 放在桌子边缘或者危险的地方,避免损坏。
教学过程
课程引入
随着技术发展,双足机器人的动态平衡控制变得越来越重要。在这节课,你将了解六轴 IMU 传感器如何监测机器人姿态,并编程控制平衡模式。这将加深你对机器人运动学的理解,并提高你的操作技能。通过实践,你将确保 XGO Rider 在不同环境中稳定运行,无论是平地还是复杂地形。
探究活动
- 双足机器人如何维持其平衡?
- 如何通过编程来启动或停止 XGO Rider 的动态平衡功能?
- 有没有更高效的方法来确保双足机器人的平衡?
开始编程
添加 XGO Rider 软件库
1. 进入“makecode.microbit.org”,点击新建项目。

2. 在弹出窗口输入项目名称并点击创建。

3. 点击代码抽屉中的扩展,在弹出界面的搜索框中输入 XGO Rider 并点击搜索图标,在显示 XGO Rider 软件库后点击。

示例程序
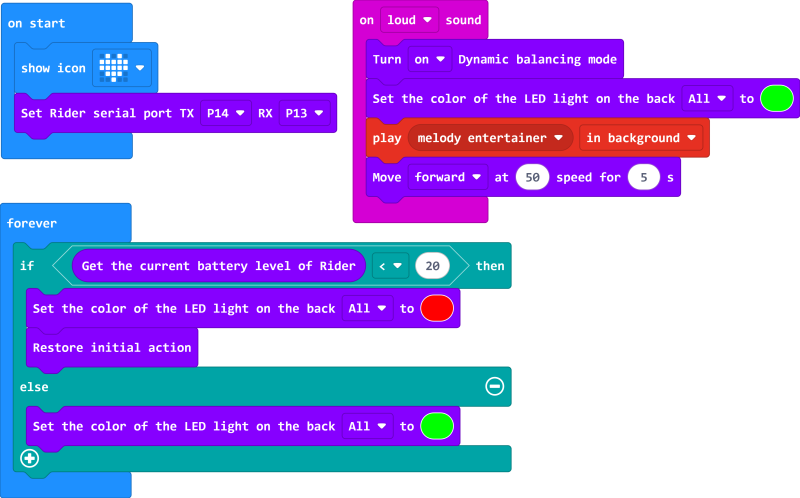
参考程序链接:https://makecode.microbit.org/_UiLekADsvUMf
 因为 XGO Rider 的表演模式中有前进和后退,请将 XGO Rider 放置在宽敞的平地上运行。
因为 XGO Rider 的表演模式中有前进和后退,请将 XGO Rider 放置在宽敞的平地上运行。
下载程序
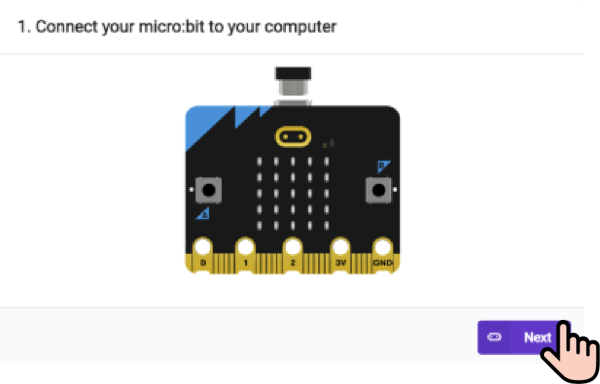
1. 使用 USB 线连接 PC 和 micro:bit V2。

2. 连接成功后,电脑上会识别出一个名为 MICROBIT 的盘符。

3. 点击左下角的 ,选择Connect Device。
,选择Connect Device。

4. 点击 。
。
5. 点击 。
。
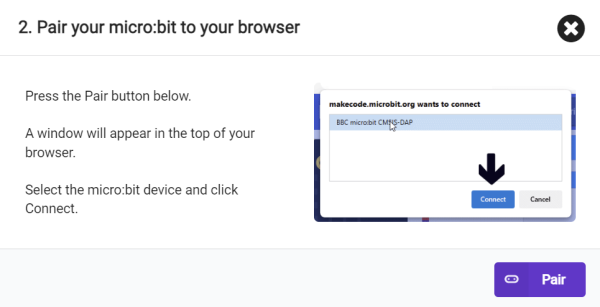
6. 在弹出窗口选择 BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的 micro:bit 就已经连接成功。

7. 点击下载程序。

团队合作与展示
- 学生分成小组,共同完成 XGO Rider 动态平衡模式打开和关闭两种模式切换的程序编写。
- 鼓励学生之间相互合作、交流和分享经验。
- 每个小组有机会向其他小组展示他们编程完成的 XGO Rider,并演示。
预期效果:

总结与反思
回顾课程内容,提醒学生掌握了哪些知识和技能?
引导学生讨论他们在制作过程中遇到的问题和困难,以及如何解决这些问题。
引导学生思考并共同讨论如何更有效的确保双足机器人的平衡。
扩展知识
IMU,即惯性测量单元(Inertial Measurement Unit),是一种用于测量和报告一个物体的特定力、角速度以及在某些情况下,磁场周围物体的方向的设备。IMU 通常由以下几个主要部分组成:
- 加速度计:测量沿一个或多个轴的线性加速度。
- 陀螺仪:测量围绕一个或多个轴的角速度。
- 磁力计:测量地球磁场的方向,用于确定物体的绝对或相对方向。
IMU 传感器在多种应用中都非常有用,包括但不限于:
- 航空航天:用于飞行器的导航系统,帮助确定飞行器的精确位置、速度和方向。
- 机器人技术:帮助机器人理解其在空间中的位置和运动状态,对于行走机器人来说尤其重要,因为它们需要保持平衡和导航。
- 汽车工业:在车辆的动态稳定控制系统中使用,如防抱死制动系统(ABS)和电子稳定程序(ESP)。
- 智能手机和可穿戴设备:用于运动检测、方向感知和用户界面的交互。
- 虚拟现实(VR)和增强现实(AR):用于头部跟踪,提供更自然和沉浸式的用户体验。
IMU 传感器可以提供实时数据,这对于需要快速响应的系统来说是至关重要的。然而,IMU 传感器的数据通常需要通过复杂的算法进行融合和校正,以提高测量的准确性和可靠性。