案例01 精彩表演
简介
在本课程中,我们将引导学生深入探索 MakeCode 图形化编程平台,并学习如何导入 XGO Rider 编程库。学生将掌握通过 micro:bit 与 XGO Rider 进行通信,以及如何编程控制其执行各种表演动作。
教学目标
- 熟练掌握 MakeCode 平台,以及如何导入 XGO Rider 库文件。
- 学会设置 micro:bit 与 XGO Rider 之间的通信串口。
- 理解串口通信的基本概念。
- 学习如何编程控制 XGO Rider 执行表演动作。
教学准备
在开始教学之前,请确保您已经准备好以下必要的物品:
 | micro:bit V2 |
|---|---|
 | XGO-Rider 整机 |
 | USB 数据线 |
 | 个人电脑(PC) |
这些材料将为您提供一个完整的体验,确保您可以顺利地进行后续的操作和学习。如果您已准备好以上内容,我们可以继续进入下一步。
 XGO Rider 开机后,为保持机身平衡,需要小幅度来回移动,请不要将 XGO Rider 放在桌子边缘或者危险的地方,避免损坏。
XGO Rider 开机后,为保持机身平衡,需要小幅度来回移动,请不要将 XGO Rider 放在桌子边缘或者危险的地方,避免损坏。
教学过程
课程引入
许多学生对机器人充满好奇,渴望了解它们的运作和控制方式。本课程将教授如何通过图形化编程平台对 XGO Rider 进行编程控制,使其执行精彩的表演动作。我们的目标是让机器人编程变得简单易懂,只需您跟随本教程的步骤操作即可。
准备好探索机器人编程的世界了吗?让我们开始这段充满乐趣和挑战的学习旅程吧!
探究活动
- 如何编写第一个 XGO Rider 控制程序?
- micro:bit 与 XGO Rider 如何进行通信?
- XGO Rider 的表演模式中,你们还想加入什么动作?
开始编程
添加 XGO Rider 软件库
1. 进入“makecode.microbit.org”,点击新建项目。

2. 在弹出窗口输入项目名称并点击创建。

3. 点击代码抽屉中的扩展,在弹出界面的搜索框中输入 XGO Rider 并点击搜索图标,在显示 XGO Rider 软件库后点击。

示例程序
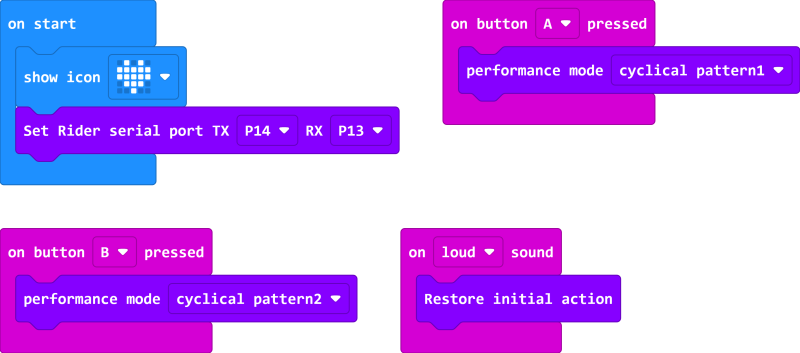
参考程序链接:https://makecode.microbit.org/_725V2h8cxd2h
 因为 XGO Rider 的表演模式中有前进和后退,请将 XGO Rider 放置在宽敞的平地上运行。
因为 XGO Rider 的表演模式中有前进和后退,请将 XGO Rider 放置在宽敞的平地上运行。
下载程序
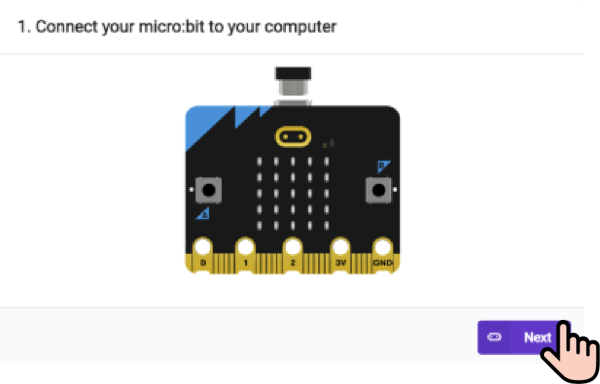
1. 使用 USB 线连接 PC 和 micro:bit V2。

2. 连接成功后,电脑上会识别出一个名为 MICROBIT 的盘符。

3. 点击左下角的 ,选择Connect Device。
,选择Connect Device。

4. 点击 。
。
5. 点击 。
。
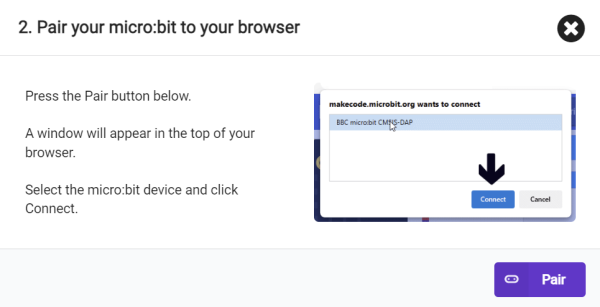
6. 在弹出窗口选择 BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的 micro:bit 就已经连接成功。

7. 点击下载程序。

团队合作与展示
- 学生分成小组,共同完成 XGO Rider 表演模式程序编写。
- 鼓励学生之间相互合作、交流和分享经验。
- 每个小组有机会向其他小组展示他们编程完成的 XGO Rider,并演示。
预期效果:
总结与反思
- 回顾本课程内容,确认学生已掌握的知识和技能,包括 MakeCode 平台编程方式、导入 XGO Rider 库文件、XGO Rider 与 micro:bit 主板通信串口设置命令、XGO Rider 表演模式命令。
- 引导学生讨论在制作过程中遇到的问题和困难,以及如何解决这些问题。
- 思考如何进一步优化编程,使 XGO Rider 的表演更加精彩。
扩展知识
micro:bit V2 中的串口通信是通过其板载的 ARM Cortex-M0+ 微控制器来实现的,它支持通过 GPIO(通用输入输出)引脚进行串行通信。以下是关于 micro:bit V2 中串口通信的 TX(Transmit,发送)和 RX(Receive,接收)引脚的详细介绍和解释:
TX 引脚
- 引脚位置:在 micro:bit V2中,TX 引脚通常是 P1。但是,micro:bit 与 XGO Rider 的串口通信 TX 引脚默认 P14。
- 功能:TX 引脚用于发送数据。当 micro:bit 需要将数据发送到另一个设备(如计算机、另一个 micro:bit 或其他支持串口通信的设备)时,它会通过 TX 引脚输出数据。
- 工作原理:在串口通信中,数据以串行形式发送,即逐位发送。发送数据时,TX 引脚会根据串口通信的协议(如 RS-232、TTL 等)产生相应的电信号。
RX 引脚
- 引脚位置:在 micro:bit V2 中,RX 引脚通常是 P2。但是,micro:bit 与 XGO Rider 的串口通信 RX 引脚默认 P13。
- 功能:RX 引脚用于接收数据。当外部设备向 micro:bit 发送数据时,数据会通过 RX 引脚输入到 Micro:bit。
- 工作原理:接收数据时,RX 引脚会监测外部设备发送的电信号,并将其转换为数字信号,这些信号随后可以被 micro:bit 的微控制器处理。
串口通信的配置和使用
- 初始化串口: 在编程时,通常需要初始化串口,设置波特率( baud rate,即每秒钟传输的位数),数据位,停止位和校验位等参数。
- 发送数据: 通过编程,可以使用 TX 引脚发送字符串或字节。
- 接收数据: 同样,可以使用编程接口来读取通过 RX 引脚接收到的数据。
注意事项
- 交叉连接:当将 micro:bit 与其他设备通过串口连接时,需要确保 micro:bit 的 TX 引脚连接到另一个设备的 RX 引脚,反之亦然。
- 电压匹配:micro:bit 的 GPIO 引脚使用的是 3.3V 逻辑电平,因此,如果连接到其他设备,需要确保电压兼容,以避免损坏micro:bit。
- 电源管理:在使用串口通信时,如果 micro:bit 由外部电源供电,需要确保电源电压和电流在安全范围内。
串口通信是电子设备间通信的一种非常常见的方式,micro:bit V2 通过其 TX 和 RX 引脚提供了这种能力,使得它能够与其他设备进行简单的数据交换,非常适合教育、原型设计和各种电子项目。