Case 09 Tornado Boy
Introduction
This course will guide students to understand and master the commands to control XGO Rider to perform clockwise or counterclockwise rotation. Through the combination of theoretical explanation and practical operation, students will learn how to accurately control the steering action of XGO Rider and enhance its maneuverability and flexibility in various application scenarios.
Teaching Objectives
Understand the basic principles of clockwise and counterclockwise rotation.
Learn the programming commands to control XGO Rider to perform clockwise and counterclockwise rotation.
Teaching Preparation
Before starting teaching, please make sure you have prepared the following necessary materials:
 | micro:bit V2 |
|---|---|
 | XGO-Rider |
 | USB Cable |
 | PC |
These materials will provide you with a complete experience and ensure that you can smoothly carry out subsequent operations and learning. If you are ready for the above, we can proceed to the next step.
 After turning on the XGO Rider, in order to keep the fuselage balanced, it needs to move back and forth slightly. Please do not place the XGO Rider on the edge of the table or in a dangerous place to avoid damage.
After turning on the XGO Rider, in order to keep the fuselage balanced, it needs to move back and forth slightly. Please do not place the XGO Rider on the edge of the table or in a dangerous place to avoid damage.
Teaching process
Course introduction
Rotational motion is the basis of robot navigation and positioning. In this course, you will learn how to use programming instructions to make the XGO Rider perform precise clockwise or counterclockwise rotation. This will not only enhance your understanding of robot control logic, but also help you more easily command the robot to complete complex steering tasks in actual operation, whether in open space or confined environment. By studying this lesson, you will be able to better master the robot's motion control skills.
Exploration Activities
- How does the robot achieve clockwise and counterclockwise rotation?
- How to control XGO Rider to perform precise rotational motion through programming instructions?
- Is there a more efficient algorithm or method to optimize the robot's rotation path planning?
Start Programming
Add XGO Rider Software Library
1. Go to "makecode.microbit.org" and click New Project.

2. Enter the project name in the pop-up window and click Create。

3. Click Extension in the code drawer, enter XGO Rider in the search box on the pop-up interface and click the search icon. Click it after the XGO Rider software library is displayed.

Sample Program

Reference Program Link: https://makecode.microbit.org/_0izJkkJ0wJT2
 Because XGO Rider has forward and backward movement in the performance mode, please place XGO Rider on a spacious flat ground.
Because XGO Rider has forward and backward movement in the performance mode, please place XGO Rider on a spacious flat ground.
Download Program
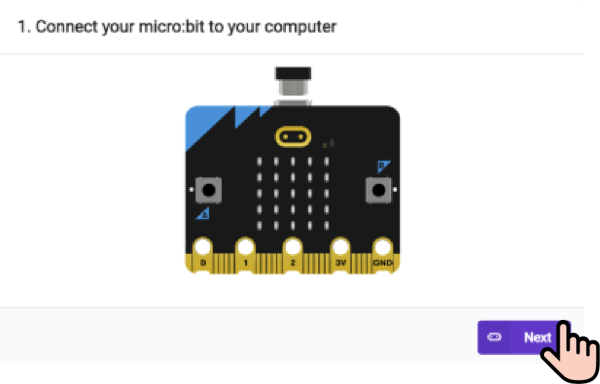
1. Use a USB cable to connect PC and micro:bit V2.

2. After the connection is successful, a drive letter named MICROBIT will be recognized on the computer.

3. Click  in the lower left corner and select Connect Device.
in the lower left corner and select Connect Device.

4. Click 。
。
5. Click 。
。
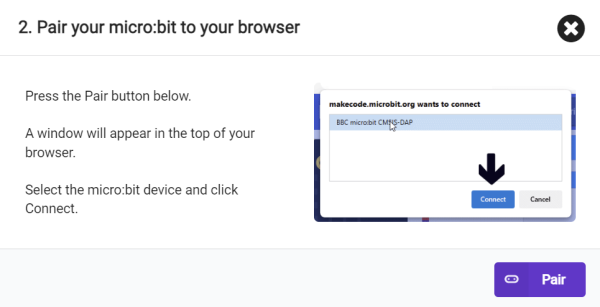
6. Select BBC micro:bit CMSIS-DAP in the pop-up window, and then select Connect. At this point, our micro:bit has been successfully connected.

7. Click Download Program.

Teamwork and Presentation
Students are divided into groups to jointly complete the programming of XGO Rider's rotational motion.
Students are encouraged to cooperate, communicate and share experiences with each other.
Each group has the opportunity to show their programmed XGO Rider to other groups and demonstrate.
Expected results:
Summary and reflection
Review the course content and remind students what knowledge and skills they have mastered?
Guide students to discuss the problems and difficulties they encountered during the production process and how to solve these problems.
Guide students to think and discuss together how to more effectively ensure the rotational motion of the bipedal robot.
Expand knowledge
A bipedal robot is a robot that imitates the way humans walk. Its design involves complex mechanical structures and advanced control algorithms.
When it comes to rotational motion control, the key is to make the robot rotate around an axis instead of moving in a straight line. This can be achieved in the following ways:
In-place rotation: The robot lifts one foot and rotates it around the vertical axis of the other foot. In this case, the supporting leg is fixed, while the swinging leg moves along a circular path.
Walk and turn: The robot can gradually adjust its direction and rotate while moving. This is usually achieved by changing the direction of each step, so that each step has a small angle offset.
In practical applications, rotational motion control also needs to take into account the influence of factors such as ground friction and robot mass distribution, as well as real-time adjustment of control strategies to deal with unexpected situations, such as uneven ground or external force interference. In addition, modern bipedal robots are often combined with artificial intelligence technologies, such as machine learning, to improve their adaptability and autonomy.