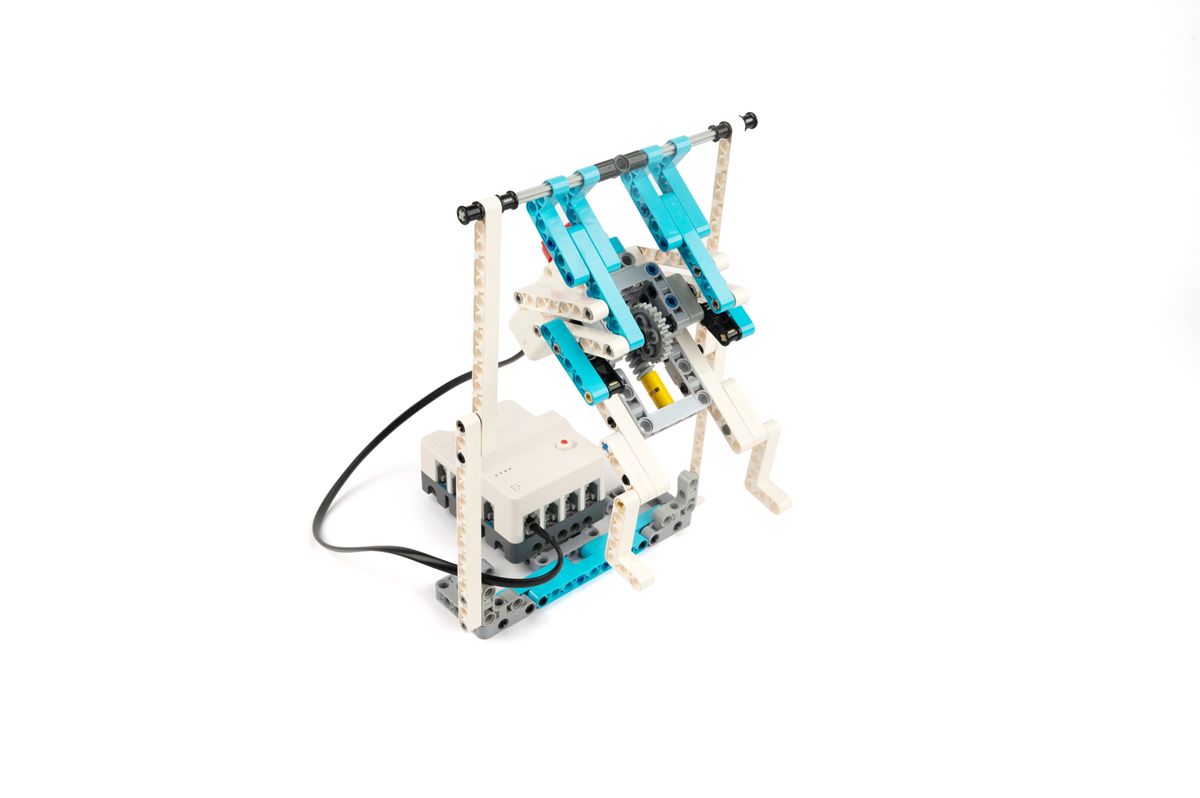
micro:bit 相关产品积木搭建哪吒Pro运动套装案例四:引体向上机器人本页总览案例四:引体向上机器人案例简介设计一款引体向上机器人,模拟引体向上动作。教学准备名称图示哪吒Pro运动套装教学目标熟悉涡轮蜗杆的特性及搭建方式激发对工程和机器人技术的兴趣。课程引入欢迎小朋友们加入我们的STEAM奇妙旅程!今天,我们将一起探索如何制作一个无需编程的引体向上机器人。在这个项目中,我们将学习到如何通过简单的机械传动来控制机器人的运动。不需要复杂的编程知识,只需动手组装和调整,你就能创造出一个引体向上机器人。让我们一起开启这段激动人心的STEAM学习之旅,激发你的创造力和解决问题的能力!学习探究涡轮蜗杆的特性是什么?搭建步骤硬件连线将智能电机连接到哪吒Pro扩展板的M1接口案例演示按下哪吒Pro上面的按键即可让引体向上机器人开始运动。总结分享扩展知识蜗轮蜗杆结构的基本特性 单方向传动(自锁性)核心特点:蜗杆可以驱动蜗轮,但蜗轮无法反向驱动蜗杆(自锁性),适合需要防止逆转的场景(如起重机、升降机)。原理:蜗杆的螺旋导程角小于摩擦角时,反向传动被摩擦力锁死。例外:多头蜗杆或导程角较大的蜗杆可能失去自锁性。高减速比与低效率传动比公式:若蜗杆为单头(1个螺旋齿),传动比 = 蜗轮齿数 : 1。例如,乐高蜗轮(24齿)的传动比为 24:1。效率低:因蜗杆与蜗轮间存在滑动摩擦,能量损耗较大(效率通常低于50%)。空间交错轴传动蜗杆与蜗轮的轴线呈90°交错,结构紧凑,适合垂直方向动力传递(如风扇、旋转塔模型)。传动平稳性蜗杆与蜗轮啮合为线接触,振动和噪音较小。引体向上的相关知识项目简介 引体向上是一项以自身重量为阻力,通过双手握杠、拉引身体向上至下颌过杠的上肢力量训练运动。其核心是依靠背阔肌、肱二头肌、前臂肌群及核心肌群的协同发力,将身体垂直拉起。该动作起源于体操训练和军事体能测试,是衡量上肢 pulling 力量(拉类力量)的经典项目,广泛应用于健身、体育考核及竞技体育训练中。引体向上对提升背部宽度、手臂力量、核心稳定性及整体爆发力具有显著效果,是自重训练体系中的黄金动作。健身原理与益处核心肌群激活:主要肌群:背阔肌(决定背部宽度)、大圆肌、菱形肌;协同肌群:肱二头肌、肱桡肌、前臂屈肌(握力支撑);稳定肌群:核心(腹横肌、竖脊肌)维持躯干中立位,避免腰部代偿。功能性提升:改善圆肩、驼背等不良体态,强化肩袖肌群稳定性;提升日常动作能力(如提拉、攀爬),增强握力和上肢协调性。激素分泌促进:大肌群复合动作刺激睾酮和生长激素分泌,提升全身代谢率和肌肉合成效率。*基础训练方法 动作规范起始姿势:双手握杠略宽于肩,身体自然下垂,肩胛骨下沉后缩,核心收紧。拉引阶段:吸气,背阔肌发力带动身体向上,肘部贴近躯干,至下颌超过杠面;下放阶段:呼气,控制速度缓慢下放至完全伸展,避免惯性摆动。