天蓬智能车-人脸追踪
目的
- 搭建一辆使用AI摄像头进行人脸追踪的天蓬智能车。
使用材料
- 1 x 天蓬智能车

- 1 x AI摄像头

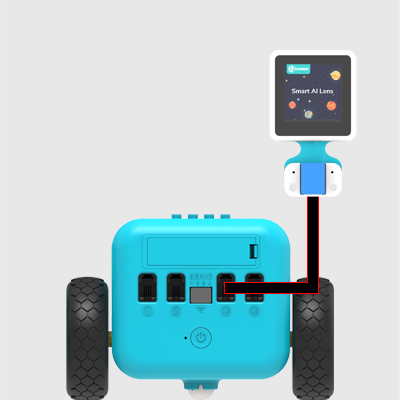
硬件连接
将AI摄像头连接到天蓬智能车的IIC端口。(AI摄像头需要额外购买)
软件
makecode编程
- 在MakeCode的代码抽屉中点击
高级,查看更多代码选项。
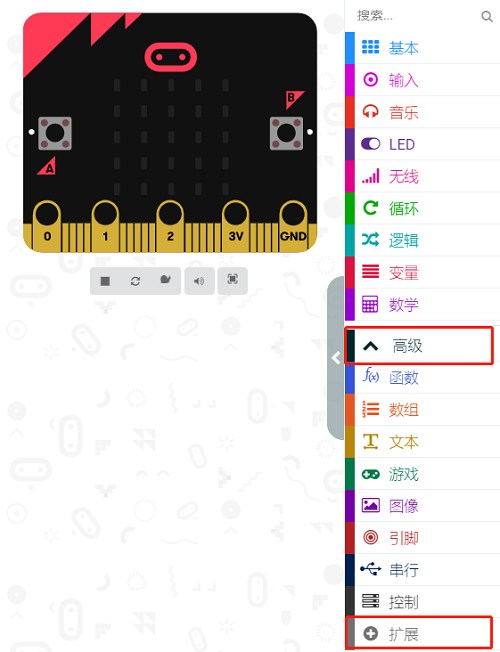
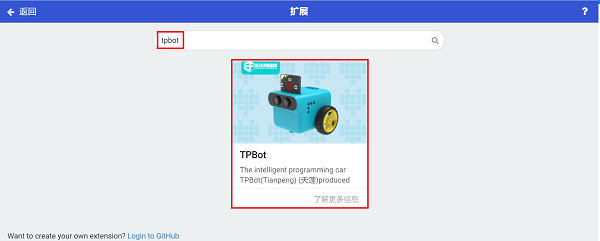
- 为了给天蓬智能车编程,我们需要添加一个扩展库。在代码抽屉底部找到
扩展,并点击它。这时会弹出一个对话框,搜索tpbot,然后点击下载这个代码库。
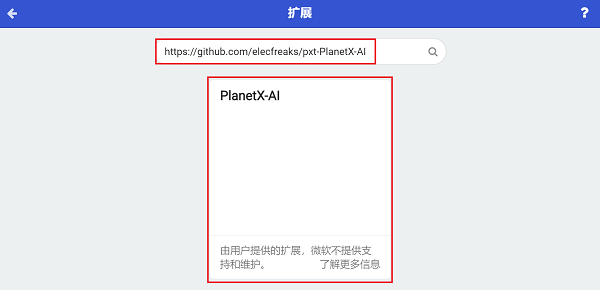
- 为了给AI摄像头编程,我们需要添加一个代码库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框。搜索
https://github.com/elecfreaks/pxt-PlanetX-AI,然后点击下载这个代码库。
##示例程序
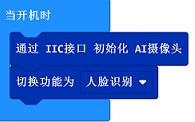
当开机时设置初始化AI摄像头,切换功能为人脸识别。
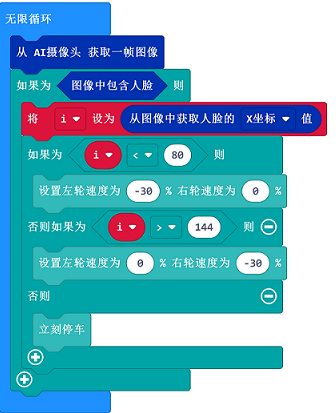
- 在
无限循环中,从AI摄像头获取一帧图像,根据识别到的人脸位置来控制小车的车头方向。
- 完整程序:
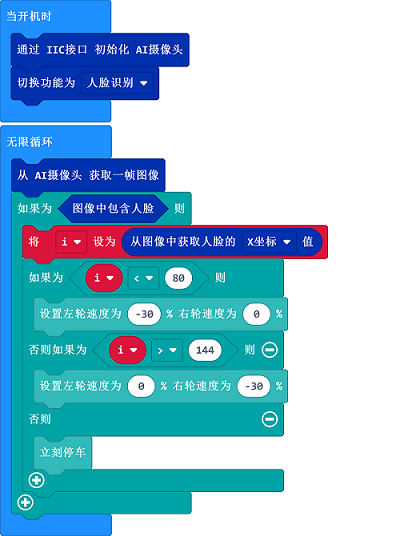
程序
你也可以通过以下网页直接下载程序。
python编程
添加天蓬智能车软件库:https://www.elecfreaks.com/learn-cn/microbitKit/TPbot_tianpeng/TPbot-python.html 添加AI摄像头软件库:https://www.elecfreaks.com/learn-cn/microbitplanetX/ai/Plant-X-EF05035-python.html
程序
# Add your Python code here. E.g.
from microbit import *
from AILens import *
from TPBot import *
tp = TPBOT()
ai = AILENS()
# 设置摄像头功能为人脸识别
ai.switch_function(Face)
while True:
# 从摄像头获取一帧
ai.get_image()
buff = ai.get_face_data()
# "buff[0]"为读取图像中人脸位置的X轴坐标
i = buff[0]
if ( i < 80):
tp.set_motors_speed(-30,0)
elif ( i > 144):
tp.set_motors_speed(0,-30)
else:
tp.set_motors_speed(0,0)
结论
天蓬智能车根据AI摄像头识别到的人脸位置调整车头朝向,使车头正对人脸方向。
思考
常见问题
Q:使用案例中的代码发现小车不能正常运行? A:电池电量不足,增大程序中的小车速度参数的数值或者更换电池,并测试。 Q:使用案例中的代码发现AI摄像头突然无法初始化进入功能选择界面? A:电池电量不足,请更换新电池,并测试。