认识cutebot智能赛车
课程简介
这节课我们将简单的了解cutebot智能赛车有什么功能,并通过一个简单的案例来学习如何对cutebot智能赛车进行编程。
课前准备
| 图片 | 名称 | 数量 | 备注 |
|---|---|---|---|
 | cutebot | 1 | |
 | 7号电池 | 3 | 自行准备 |
 | USB数据线 | 1 | |
 | micro:bit | 1 | 自行准备 |
 | PC | 1 | 自行准备 |
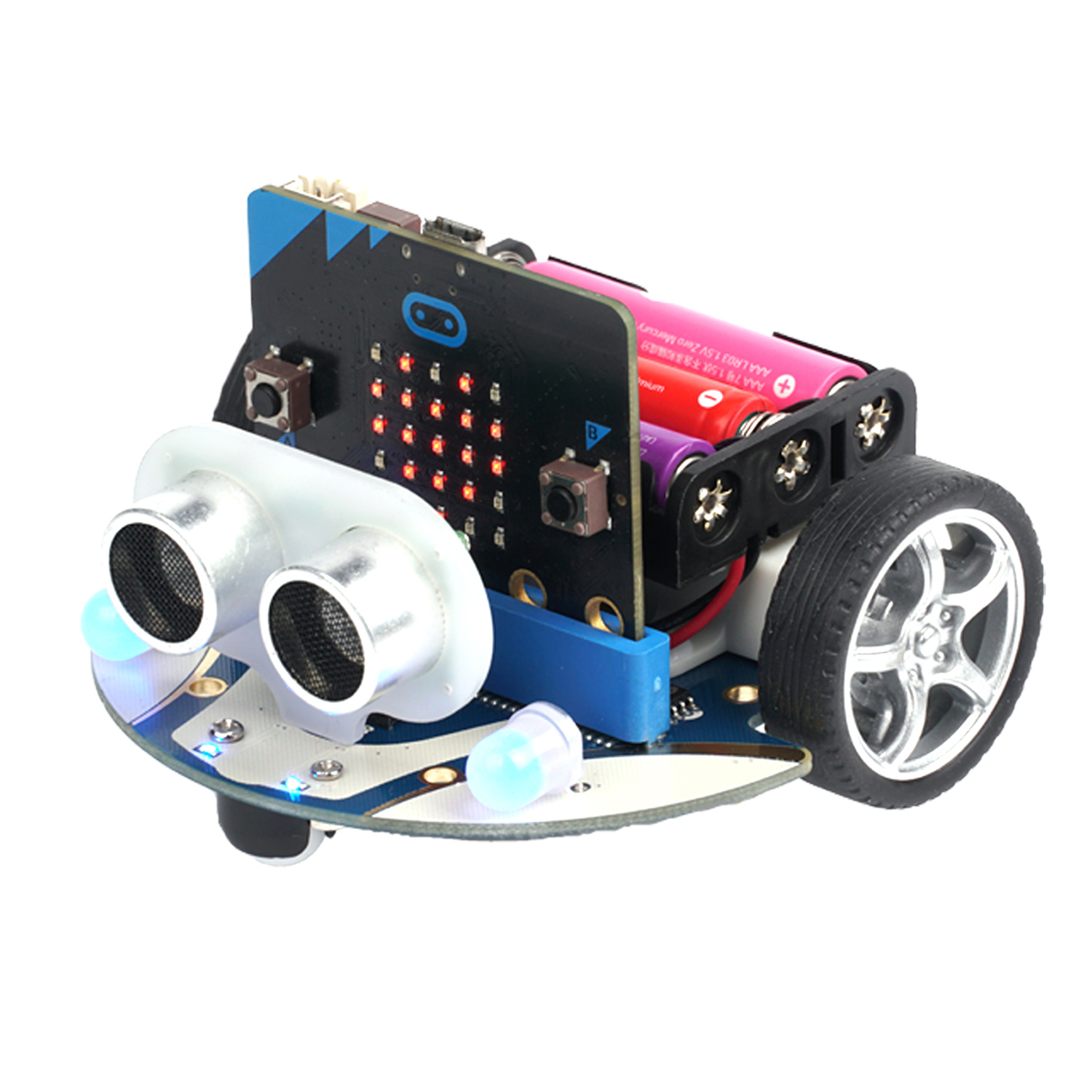
cutebot智能赛车简介
ELECFREAKS Cutebot是一款带有双高速电机马达的后驱智能赛车。
Cutebot同时搭载了很多车载设备,包括超声波导航距离传感器,两颗RGBLED车大灯,两颗Rainbow LED车底示廓灯,两个车道辅助巡线探头。
功能模块描述
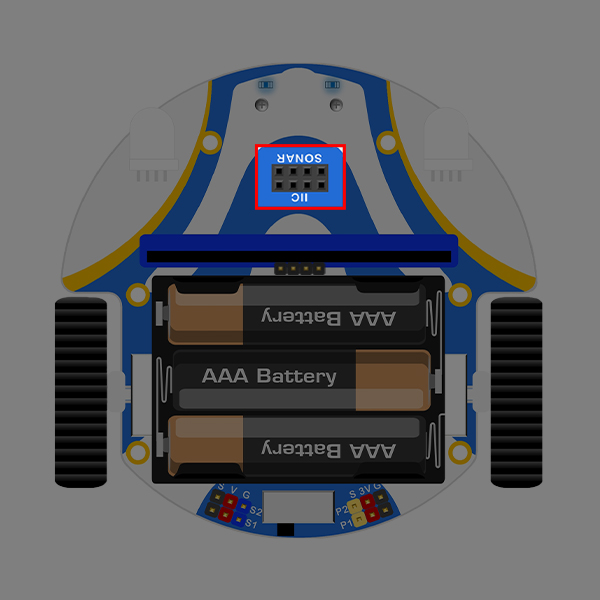
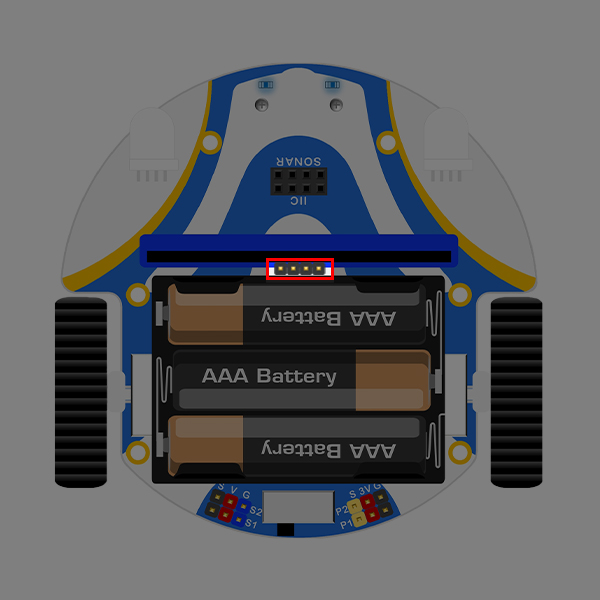
小车正前方配备超声波接口和micro:bit的IIC接口
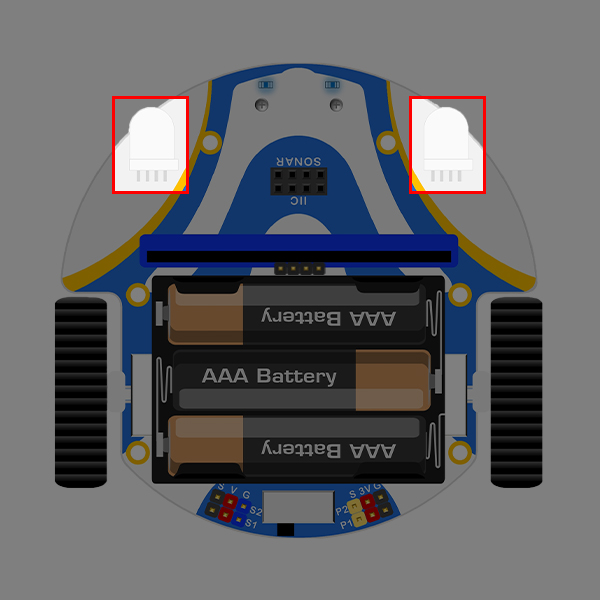
前方左右两边各配备两颗RGB全彩色LED车灯,通过扩展板控制,不占用micro:bitIO口数量。
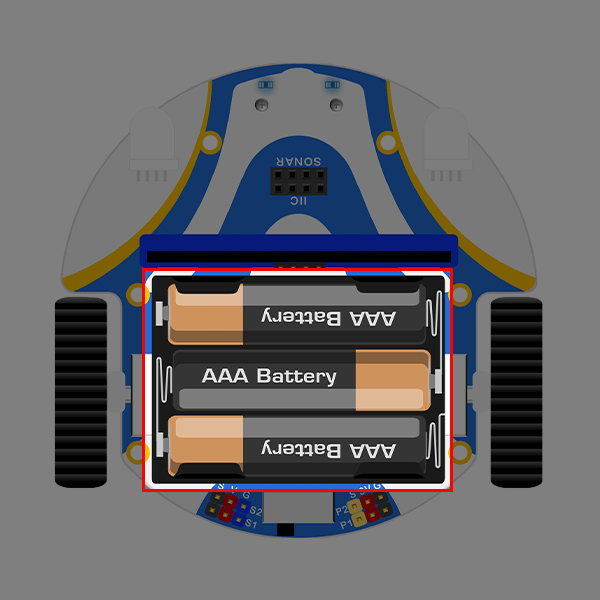
正上方装有三颗AA电池电池盒扩展板,用来驱动整个小车。
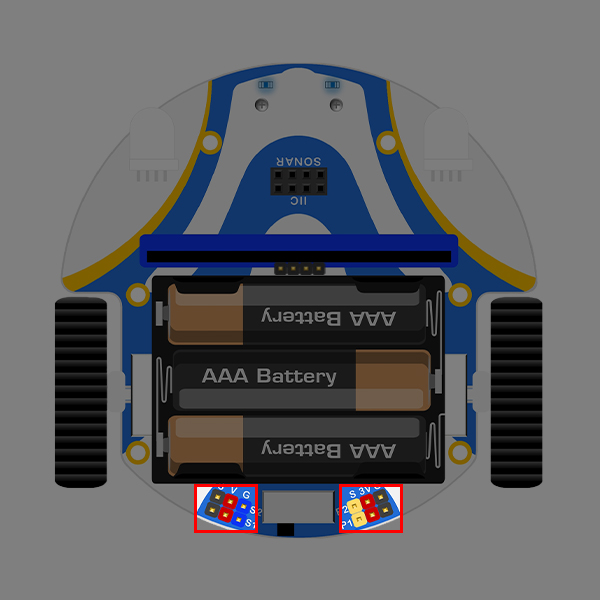
电池盒扩展板上同时扩展了S1、S2舵机接口和P1,P2 IO接口。
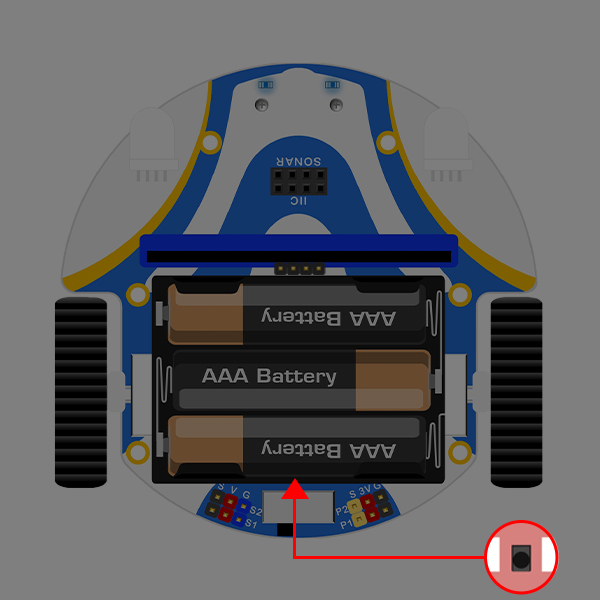
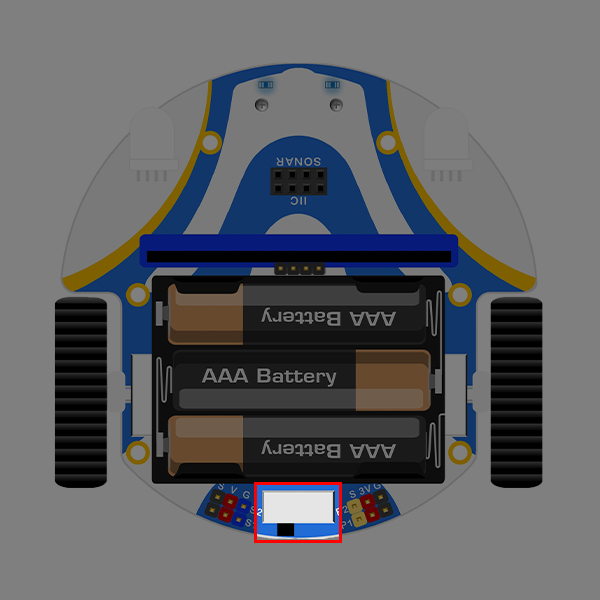
小车尾部带有红外线接收头(在电池盒下方),连接在micro:bit主板的P16接口。
小车配备可供AI摄像头连接的IIC接口
尾部红外线接收头旁边为小车总电源开关,同时配有一颗LED灯指示开关状态。
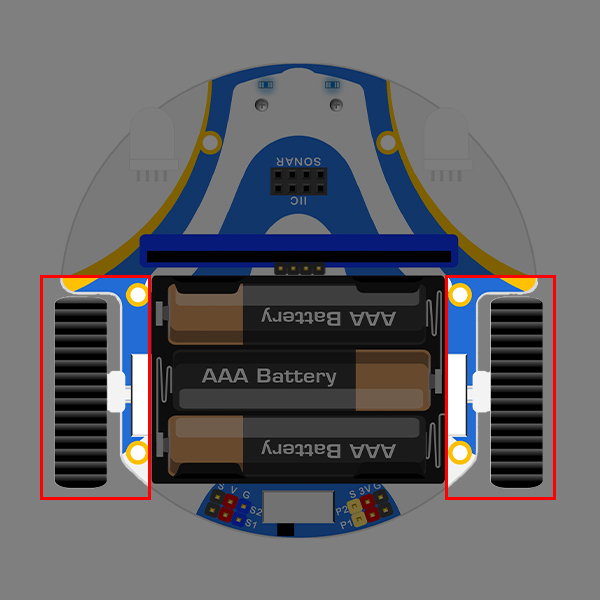
左右两边为两个 微型高速直流齿轮减速电机 驱动的车轮,转速高达(300转/分钟),享受飞驰一般的速度。
小车底部前方有两个巡线头,用于检测黑线及边缘,连接到micro:bit主板的P13和P14接口。

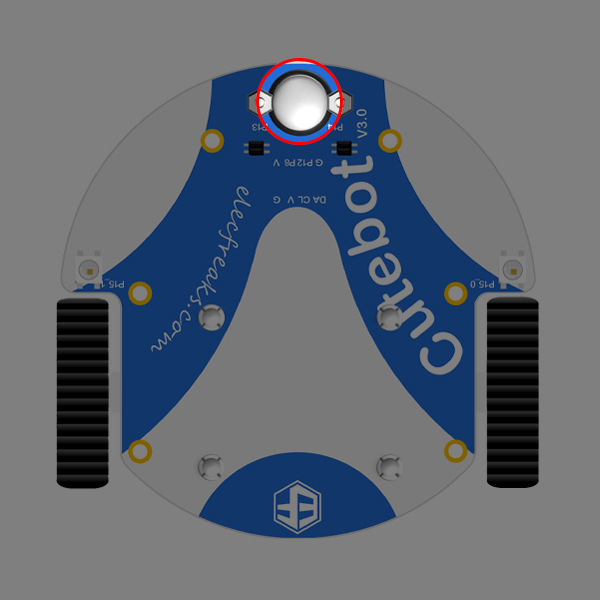
小车底部前方装配一个金属万向轮,小车用 左右轮速度差的方式 完成360度全方向行驶。
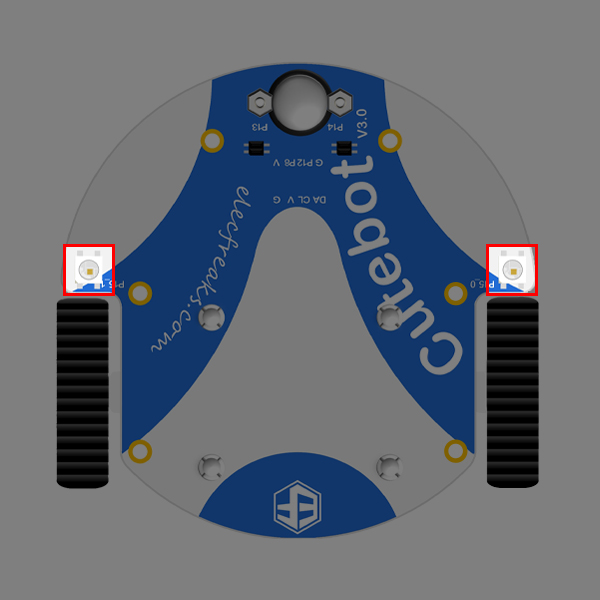
底部两侧边安装了两颗Rainbow LED 全彩灯珠,连接到micro:bit主板的P15口,需要使用扩展Neopixel来驱动使用,可以作为小车示廓灯或其他功能使用。
快速入门
准备工作
将电池盒的电源线插入cutebot智能赛车。

将3M双面胶贴在电池盒上面。

将电池盒贴在cutebot智能赛车上。

编程平台
我们通常使用图形化编程平台makecode对micro:bit进行编程
编程平台入口:https://makecode.microbit.org/
新建项目
打开https://makecode.microbit.org/
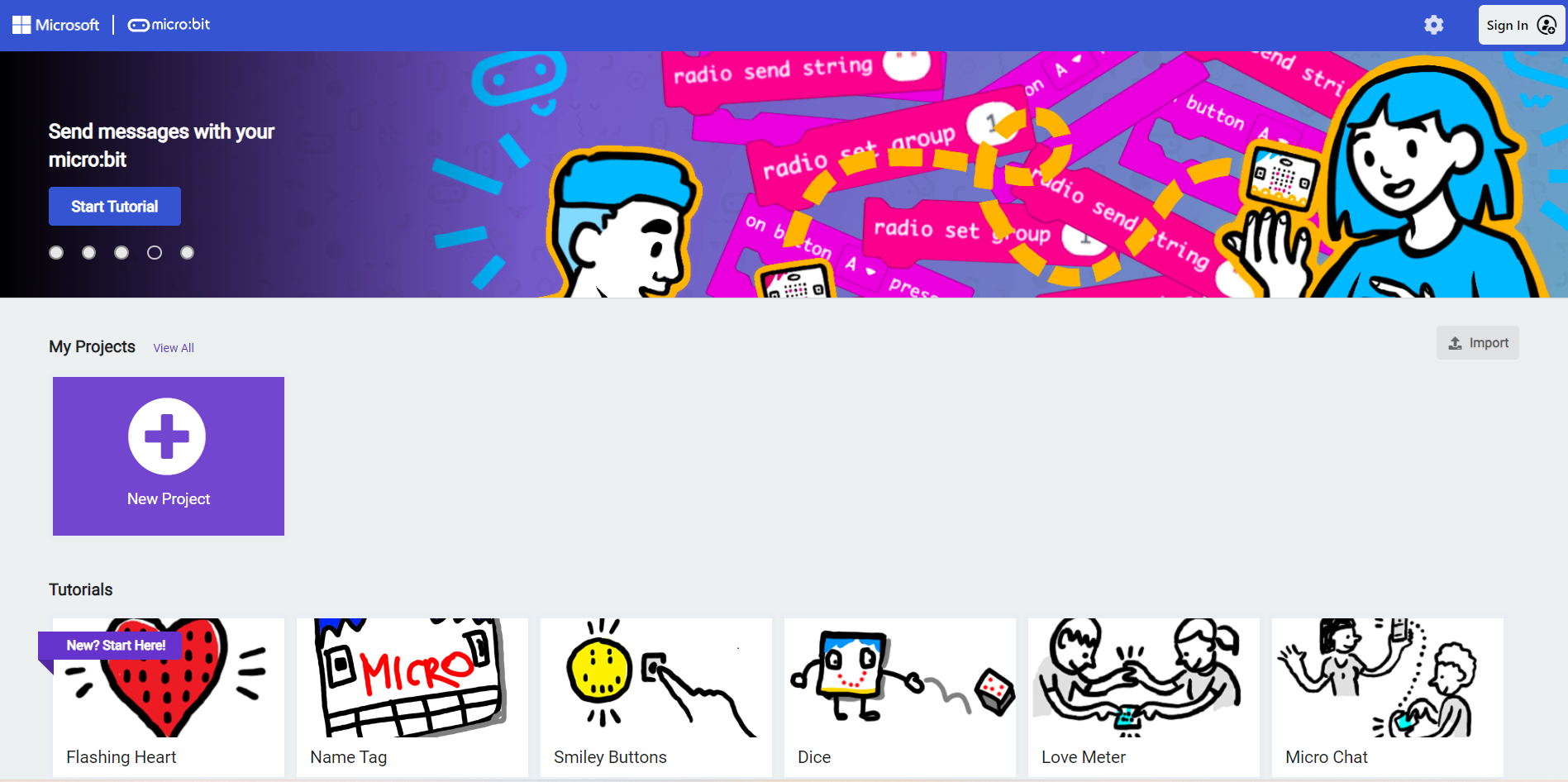
新建项目
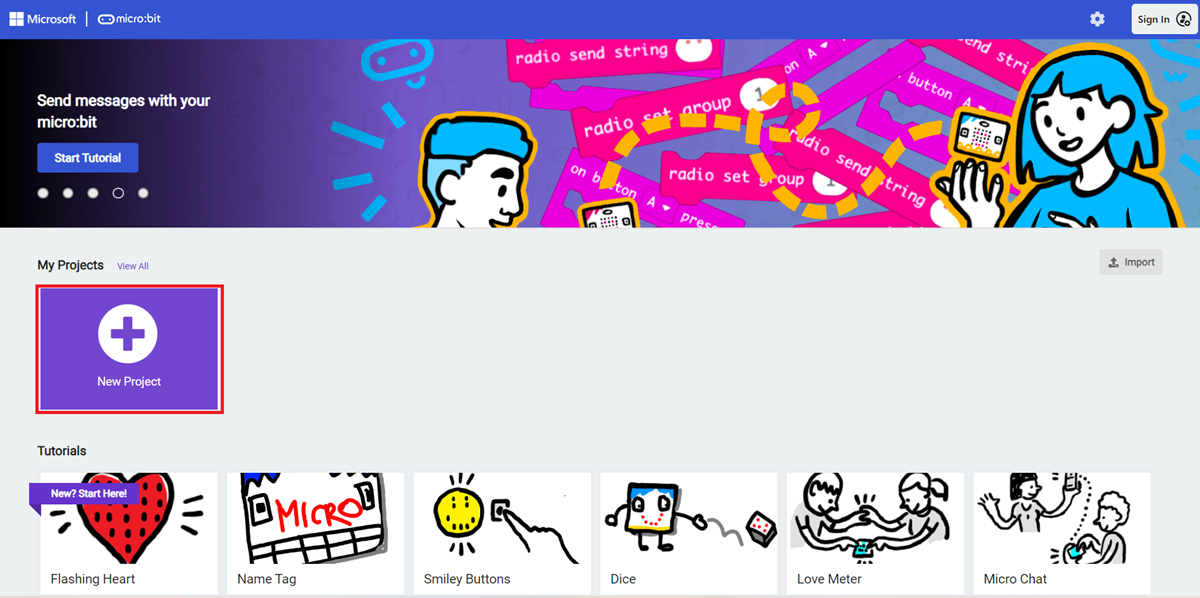
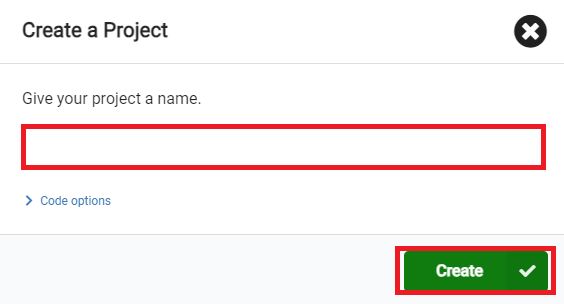
输入项目名称并点击创建。
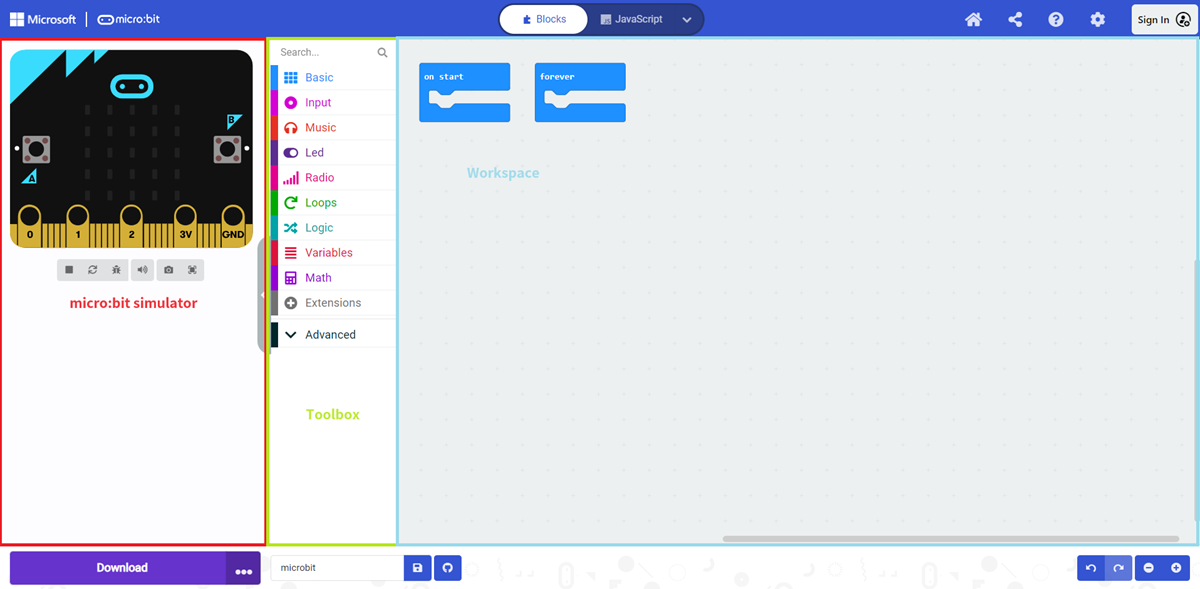
进入编辑器界面后我们可以看到Micro:bit Simulator,Toolbox,Workspace。
添加软件库
在makecode编程界面的Toolbox点击Extensions。

在弹出页面搜索cutebot,并点击选择cutebot的软件库。

软件积木块解释
| 积木块 | 功能 | 参数 |
|---|---|---|
 | 设置小车左轮或右轮的速度 | 参数一:数值 数值范围:-100~100 参数二:数值 数值范围:-100~100 |
 | 设置小车以固定速度朝某个方向运行指定时间 | 参数一:下拉选项 可选项:前进、后退、左、右 参数二:整数 数值范围为-100~100 参数三:自然数 |
 | 设置小车全速前进 | |
 | 设置小车全速后退 | |
 | 设置小车全速左转 | |
 | 设置小车全速右转 | |
 | 设置小车立刻停车 | |
 | 设置小车车头灯为预设颜色 | 参数一:下拉选项 可选项:右侧RGB、左侧RGB、全部 参数二:下拉选项 选项:  |
 | 以RGB模式设置小车车头灯颜色 | 参数一:下拉选项 可选项:右侧RGB、左侧RGB、全部 参数二:自然数 数值范围:0 ~ 255 参数三:自然数 数值范围:0 ~ 255 参数四:自然数 数值范围:0 ~ 255 |
 | 关闭小车车头灯 | |
 | 判断两个巡线传感器的状态 | 参数一:下拉选项 可选项:黑黑、白黑、黑白、白白 |
 | 分别判断两个巡线传感器的状态 | 参数一:下拉选项 可选项:左、右 参数二:下拉选项 可选项:找到、丢失 |
 | 当小车的巡线头检测到对应状态时,执行内部程序 | 参数一:下拉选项 可选项:左、右 参数二:下拉选项 可选项:找到、丢失 |
 | 检测小车前方障碍物的距离 | 参数一:下拉选项 可选项:厘米、英寸 |
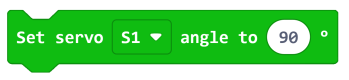 | 设置连接到指定接口的180°舵机转动到指定角度 | 参数一:下拉选项 可选项:S1、S2 参数二:自然数 数值范围:0 ~ 180 |
 | 当接收到红外信号时,执行内部程序 | |
 | 判断接收到的红外信号信息 | 参数一:下拉选项 可选项:Menu、Up、Left、Right、Down、OK、Plus、Minus、Back、0、1、2、3、4、5、6、7、8、9 |
软件积木块简介及示例
设置小车左轮或右轮的速度。
示例程序:https://makecode.microbit.org/_bV3cyW8JDPp7

你也可以通过以下网页直接下载程序。
如何将程序下载到micro:bit?
使用USB线连接PC和micro:bit V2。
连接成功后,电脑上会识别出一个名为MICROBIT的盘符。
点击左下角的 ,选择
,选择Connect Device。
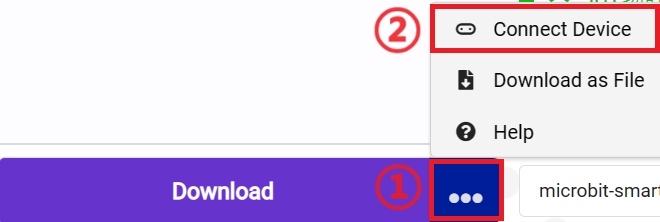
点击 。
。
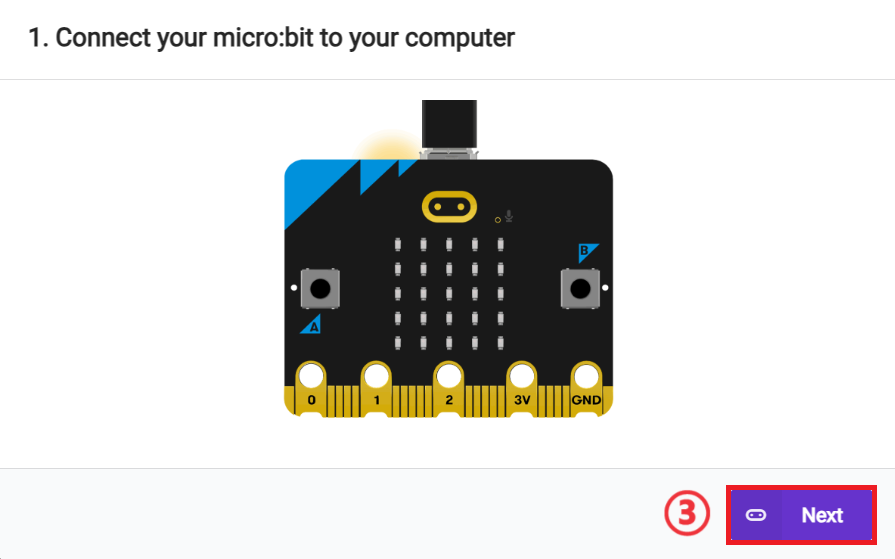
点击
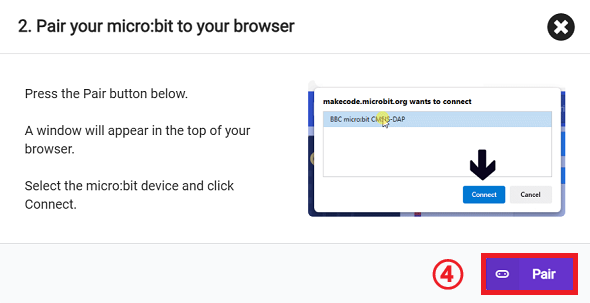
在弹出窗口选择BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的micro:bit就已经连接成功。

点击下载程序。

结果
按下micro:bit的按键A,小车以100%的速度向前行驶。
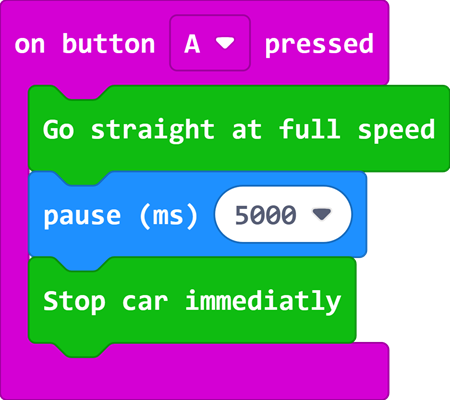
设置小车以固定速度朝某个方向运行指定时间。
示例程序:https://makecode.microbit.org/_6sc5d0ij3WL9

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车以50%的速度朝前行驶5秒后停下。
设置小车全速前进。
示例程序:https://makecode.microbit.org/_eup6qgbb2gYz

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车全速前进。
设置小车全速后退。
示例程序:https://makecode.microbit.org/_acjeice30TKp

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车全速倒退。
设置小车全速左转。
示例程序:https://makecode.microbit.org/_0PfPA7f83Rmo

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车向左转。
设置小车全速右转。
示例程序:https://makecode.microbit.org/_Pz2ebkPvH8p1

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车向右转。
设置小车立刻停车。
示例程序:https://makecode.microbit.org/_XDDPKvarbfrK
你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车全速向前行驶5秒,然后停车。
设置小车车头灯为预设颜色。
示例程序:https://makecode.microbit.org/_FxxXC2e6LTHF

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车LED车头灯显示红色。
以RGB模式设置小车车头灯颜色。
示例程序:https://makecode.microbit.org/_DJTUyJiesU9q

你也可以通过以下网页直接下载程序。
结果:按下按键A后,小车LED车头灯显示绿色。
关闭小车车头灯。
示例程序:https://makecode.microbit.org/_ersCDADdWWV4

你也可以通过以下网页直接下载程序。
结果:开启电源后,小车车头灯显示蓝色灯光,按下按键A后,小车LED车头灯熄灭。
判断两个巡线传感器的状态。
示例程序:https://makecode.microbit.org/_8dbgTr2ku0Ko

你也可以通过以下网页直接下载程序。
结果:开启电源后,当小车两个巡线头都检测到黑色区域时,micro:bit显示爱心图标,当小车两个巡线头都检测到白色区域时,micro:bit显示笑脸图标。
分别判断两个巡线传感器的状态。
示例程序:https://makecode.microbit.org/_PwmF7fP6agxC

你也可以通过以下网页直接下载程序。
结果:开启电源后,当小车左侧巡线头都检测到黑线时,micro:bit显示爱心图标,当小车右侧巡线头都检测到黑线时,micro:bit显示笑脸图标。
当小车的巡线头检测到对应状态时,执行内部程序。
示例程序:https://makecode.microbit.org/_cpLdyi79t9pb

你也可以通过以下网页直接下载程序。
结果:开启电源后,当小车左侧巡线头都检测到黑线时,micro:bit显示爱心图标
检测小车前方障碍物的距离。
示例程序:https://makecode.microbit.org/_czUc7rFp4Eu2

你也可以通过以下网页直接下载程序。
结果:开启电源后,micro:bit显示小车前方障碍物与小车的距离
设置连接到指定接口的180°舵机转动到指定角度。
示例程序:https://makecode.microbit.org/_99PFCsWEFbTR

你也可以通过以下网页直接下载程序。
结果:通过A、B按键控制连接到S1的舵机的转动角度。
当接收到红外信号时,执行内部程序。
注意:此案例需要搭配红外遥控器进行测试。
示例程序:https://makecode.microbit.org/_LV7E45CaML5t

你也可以通过以下网页直接下载程序。
结果:当接受到红外信号时,显示爱心图标。
判断接收到的红外信号信息。
注意:此案例需要搭配红外遥控器进行测试。
示例程序:https://makecode.microbit.org/_7hm0LUXxAYjR

你也可以通过以下网页直接下载程序。
结果:当接受到Menu被按下的红外信号时,显示笑脸图标。
关于cutebot的更多案例,请查看:https://wiki.elecfreaks.com/en/microbit/microbit-smart-car/microbit-smart-cutebot/