案例09:智能避障行驶
目的
今天我们将使用Cutebot智能赛车制作一辆自动避开障碍物的避障小车!这个小车能够通过传感器检测到障碍物,并自动躲避它们,就像是具备智能思维一样。
想象一下,当我们在道路上行驶时,遇到障碍物时需要及时躲避,以确保安全通行。现在,我们将学习如何使用传感器和编程来实现这一功能。

使用材料
1 x Cutebot套件
1 x 超声波探头(自备或使用Cutebot套装内探头)
软件平台
编程
步骤 1
在MakeCode的代码抽屉中点击高级,查看更多代码选项。
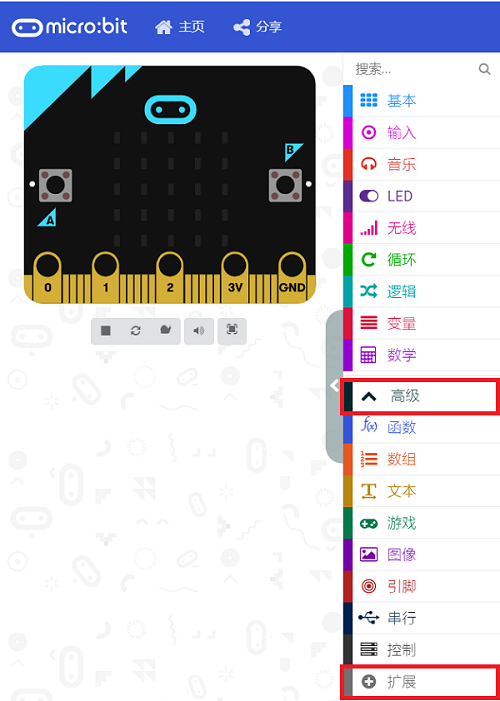
为了给Cutebot套件编程,我们需要添加一个代码库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框。搜索Cutebot,然后点击下载这个代码库。
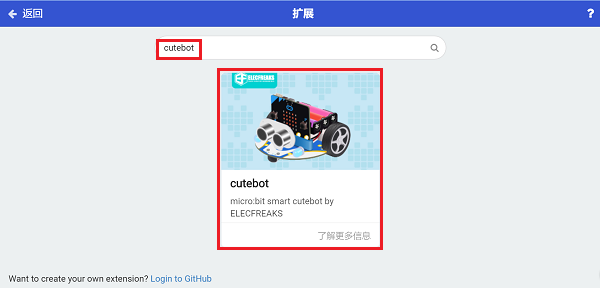
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
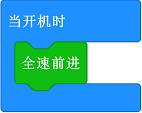
步骤 2
在当开机时积木块中插入全速前进积木块;
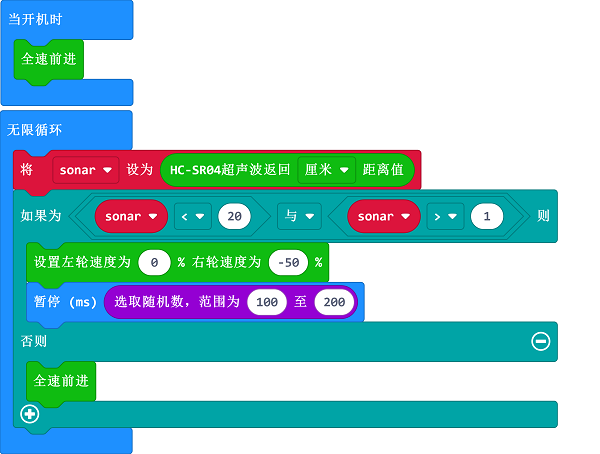
步骤 3
在无限循环积木块中设置一个Sonar变量,用来保存超声波返回的Cm值。
当超声波返回值大于2并且小于20时候,证明前方20CM处已经检测到障碍,设置左轮速度为0,右轮速度-50,向右转向一个随机时间。完成一个右转避障。
如果不是,就全速前进。
程序
请参考程序连接:https://makecode.microbit.org/_YJxYhcT3vC68
你也可以通过以下网页直接下载程序。
---结论
小车全速前进,当检测到20cm之内有障碍物时,向右旋转一个角度,继续前进。
思考
为什么要判断返回值大于2CM。
常见问题
Q:使用cutebot小车时,发现小车本来正常行驶,接入超声波传感器后小车故障,无法行驶。
A:请检查超声波传感器是否插错接口,应该插在sonar接口而不是iic接口。