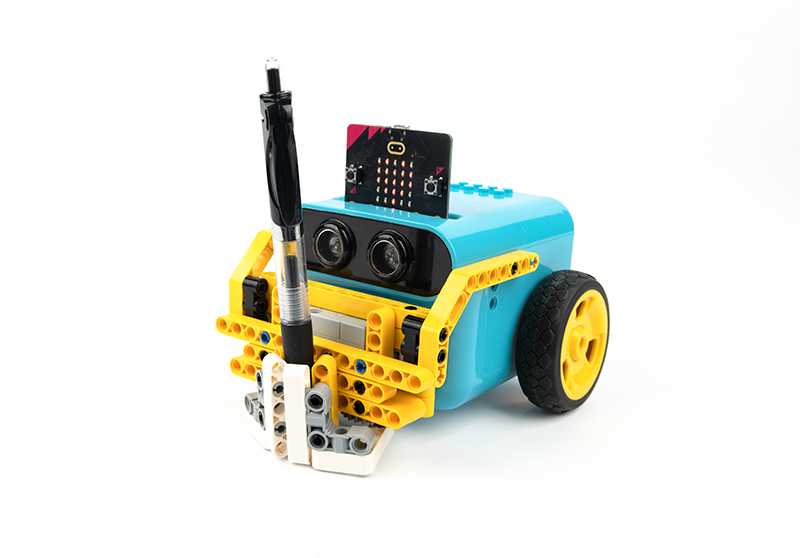
TPbot Mechanical Claw
Purpose
To build a TPBot with the Mechanical claw.
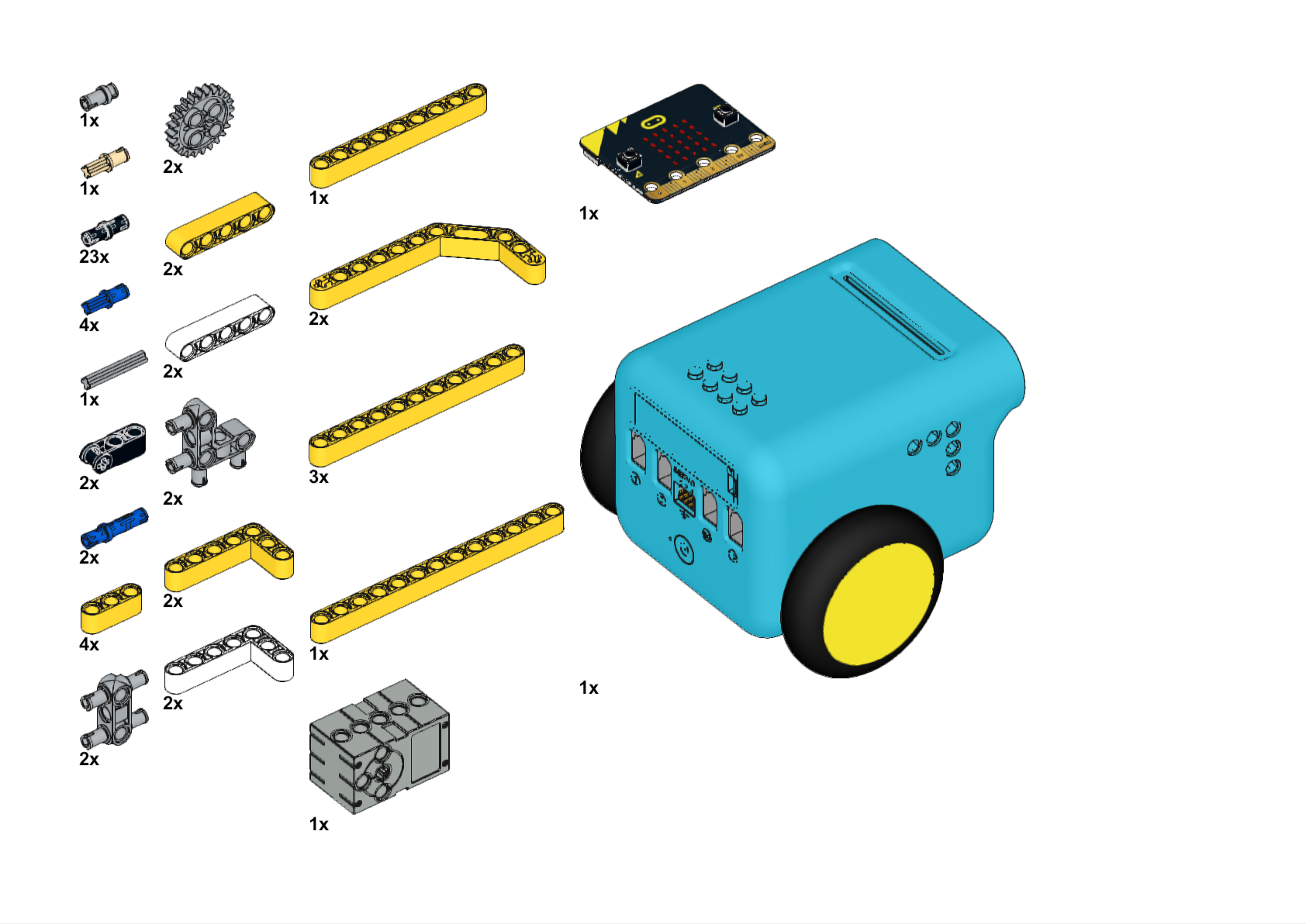
Materials Requested
Bricks Pack
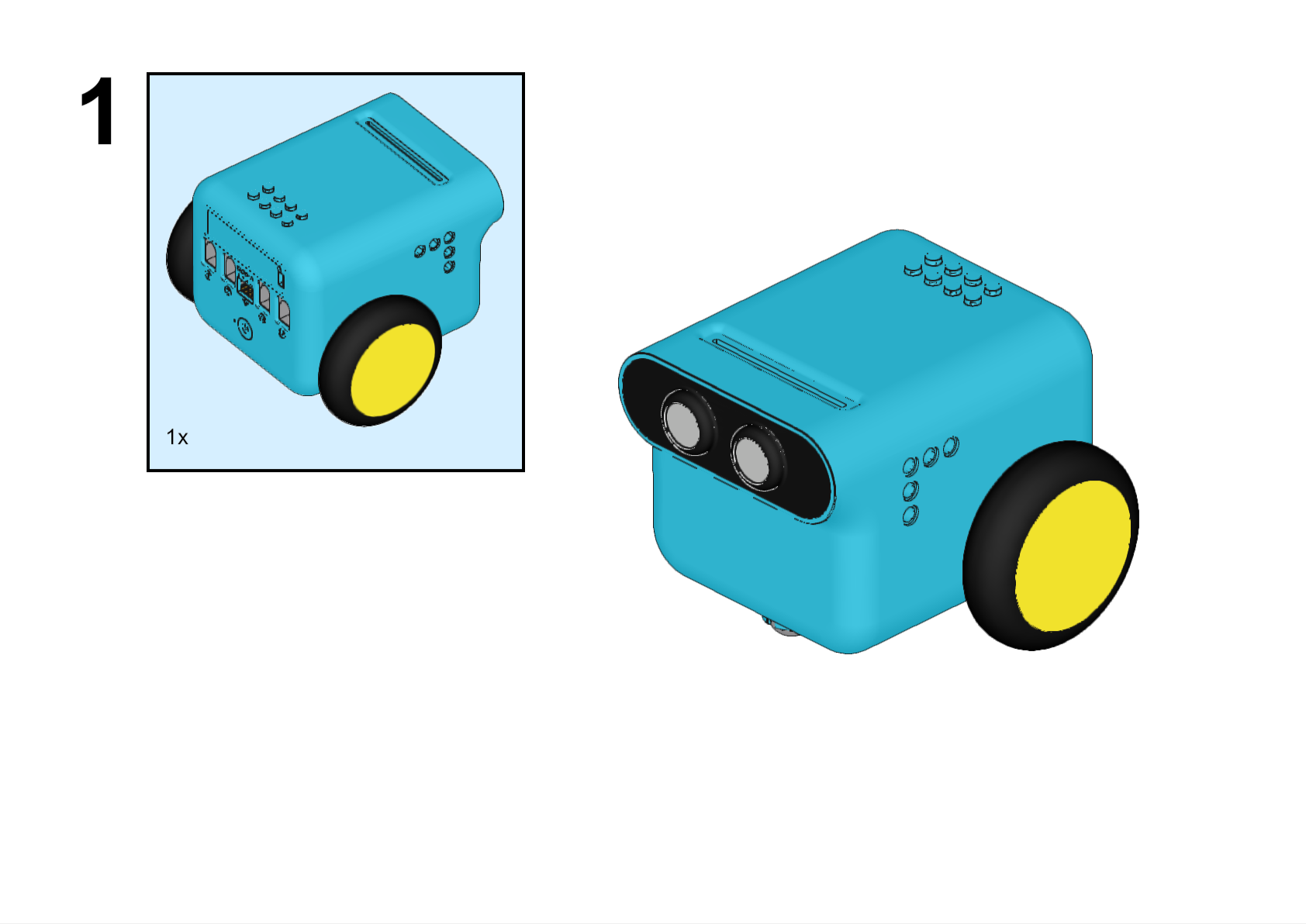
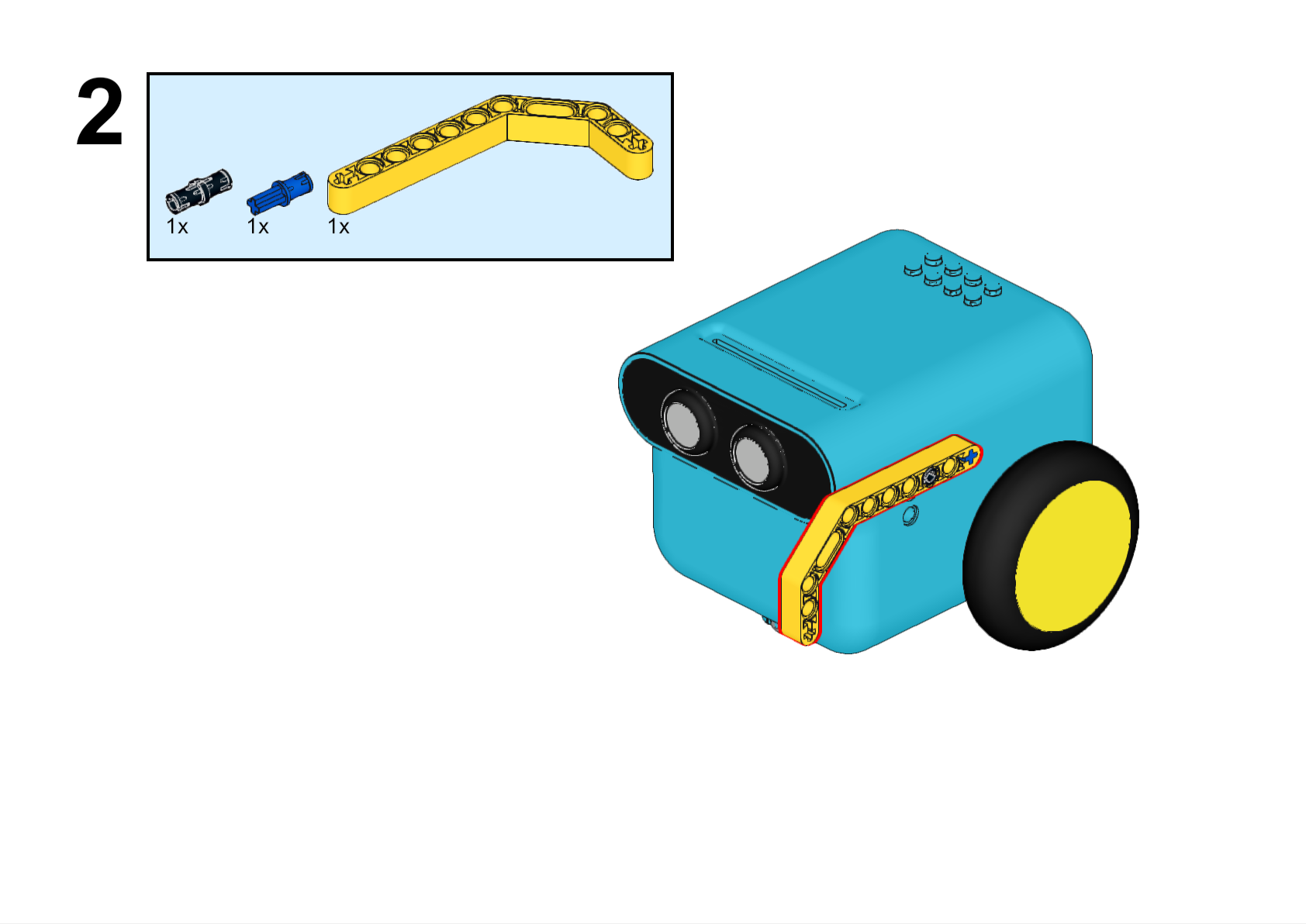
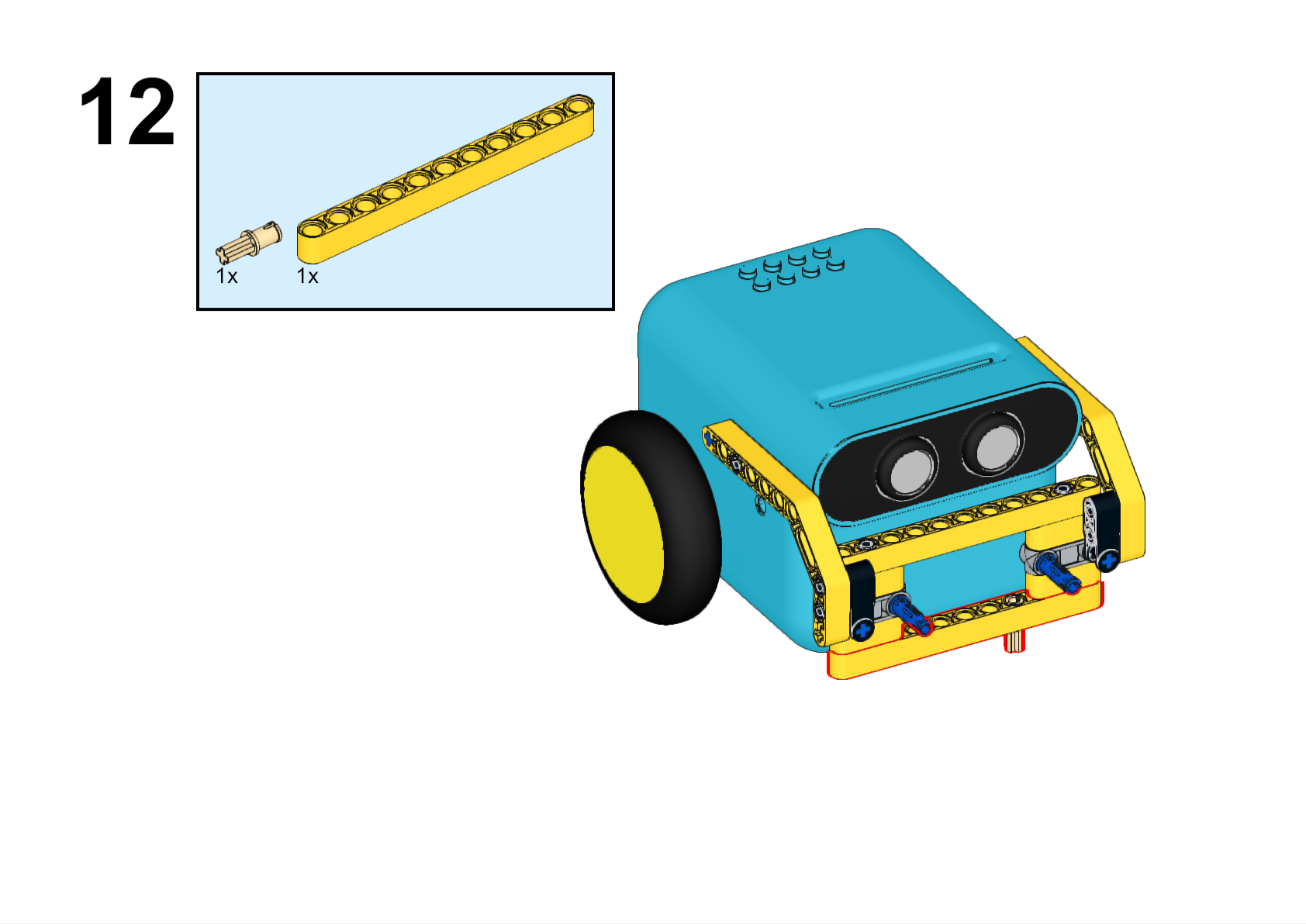
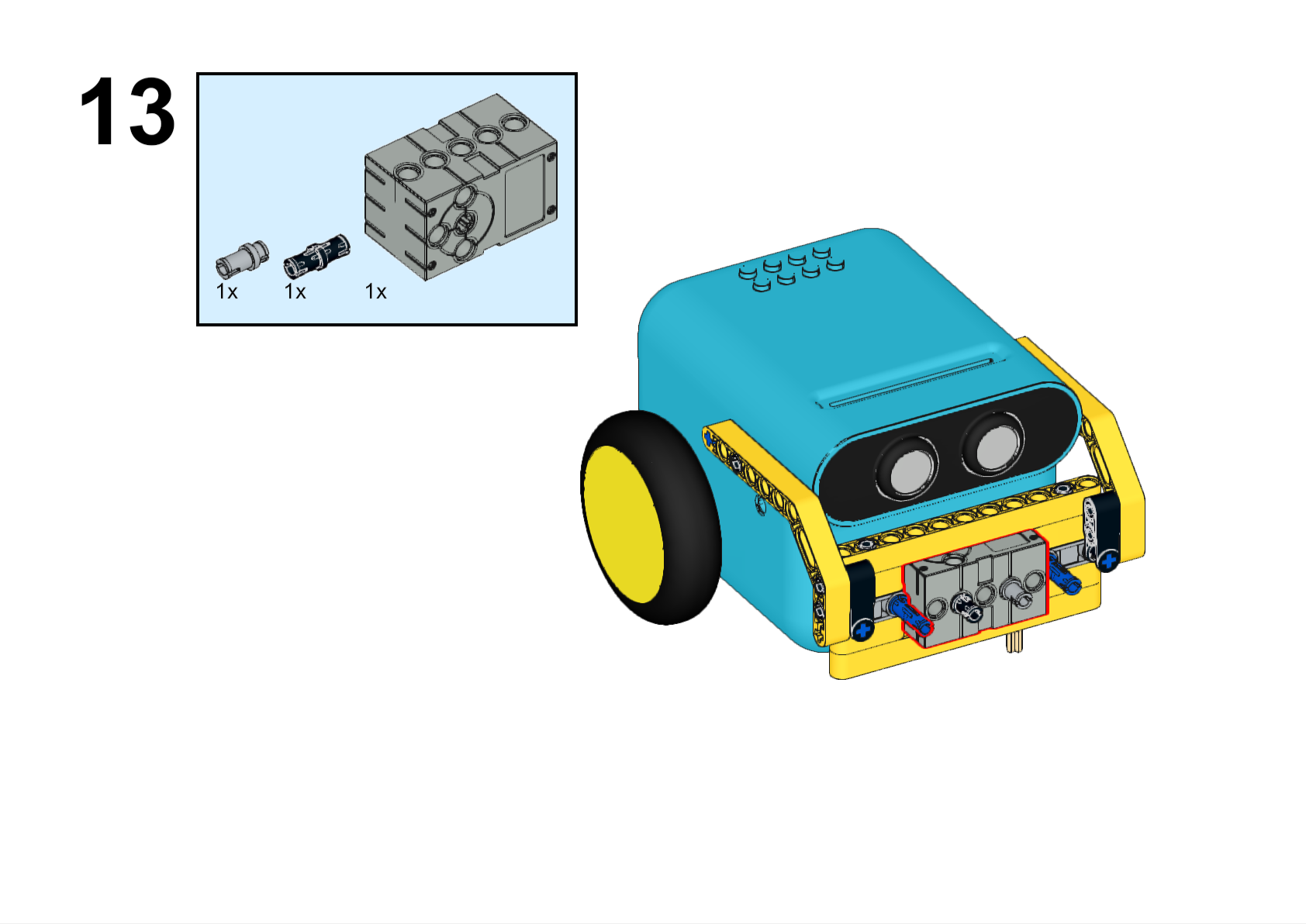
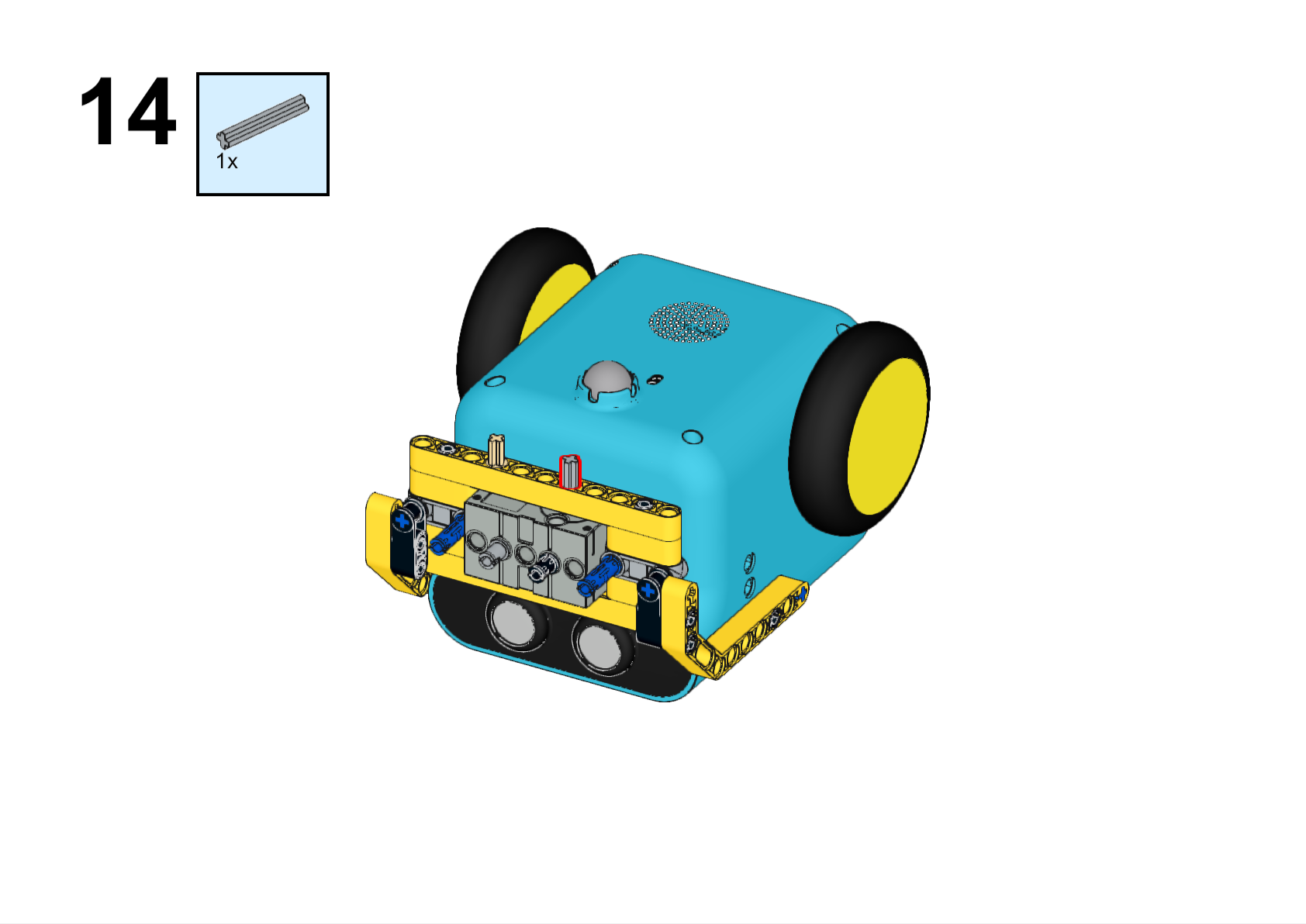
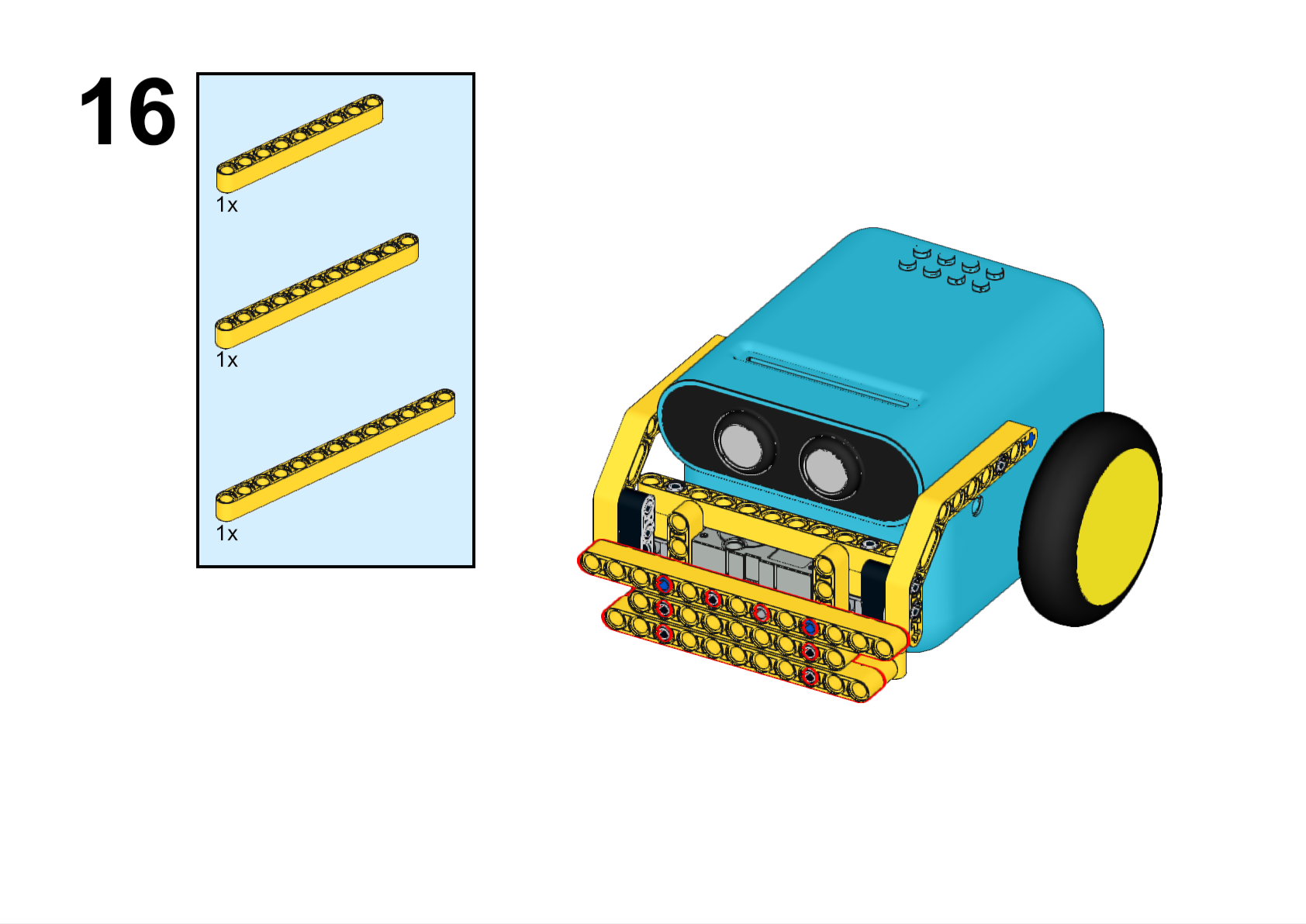
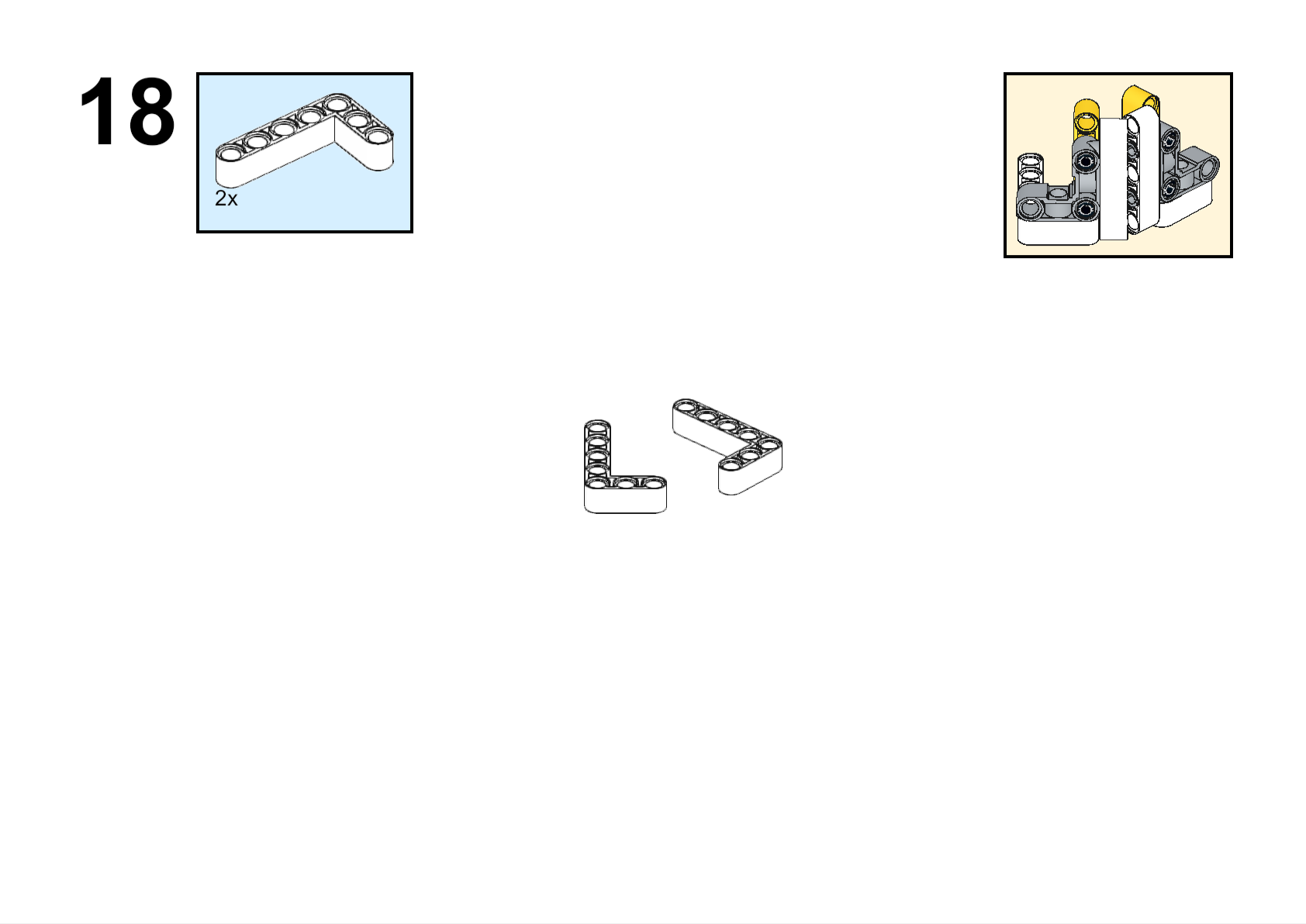
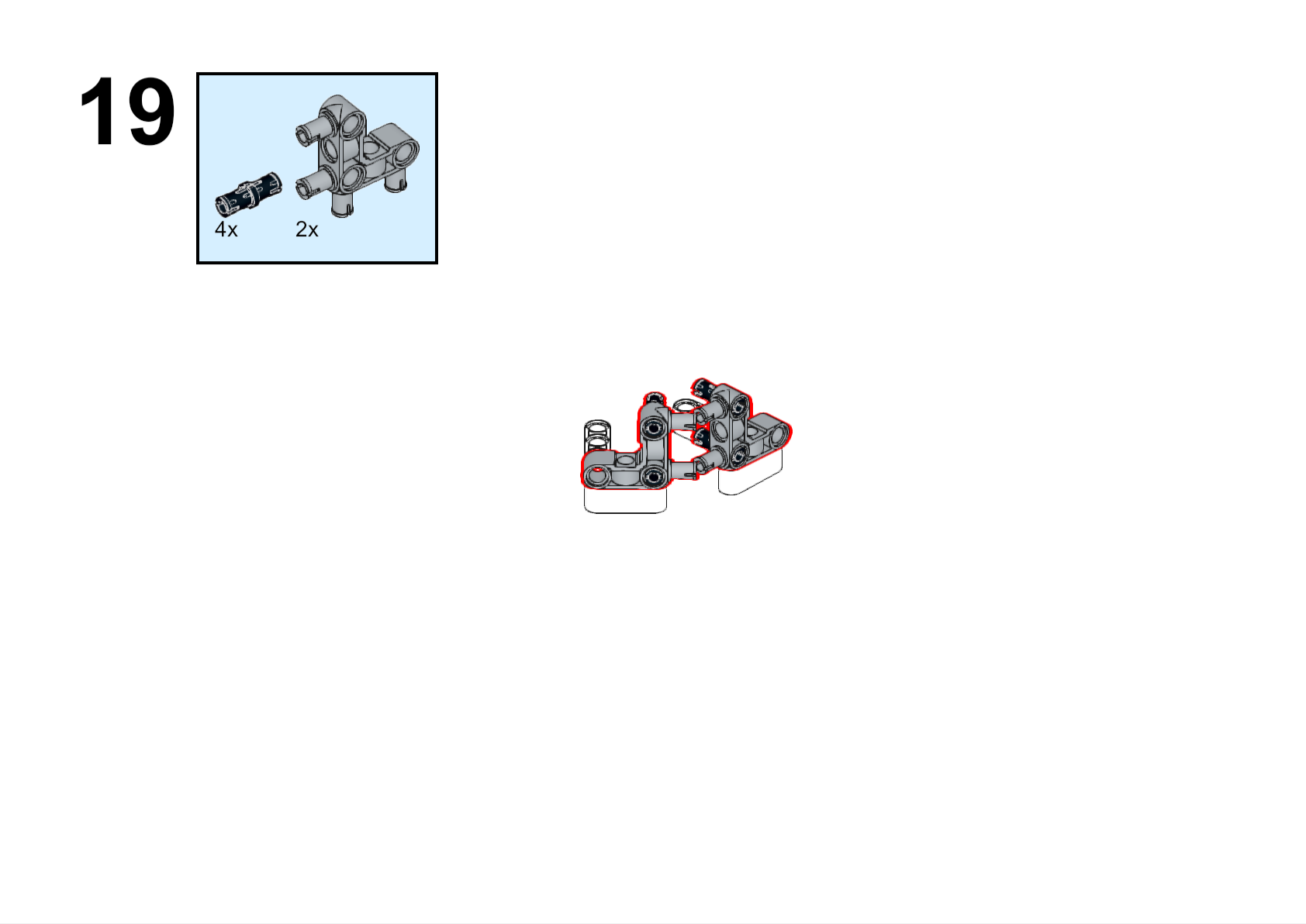
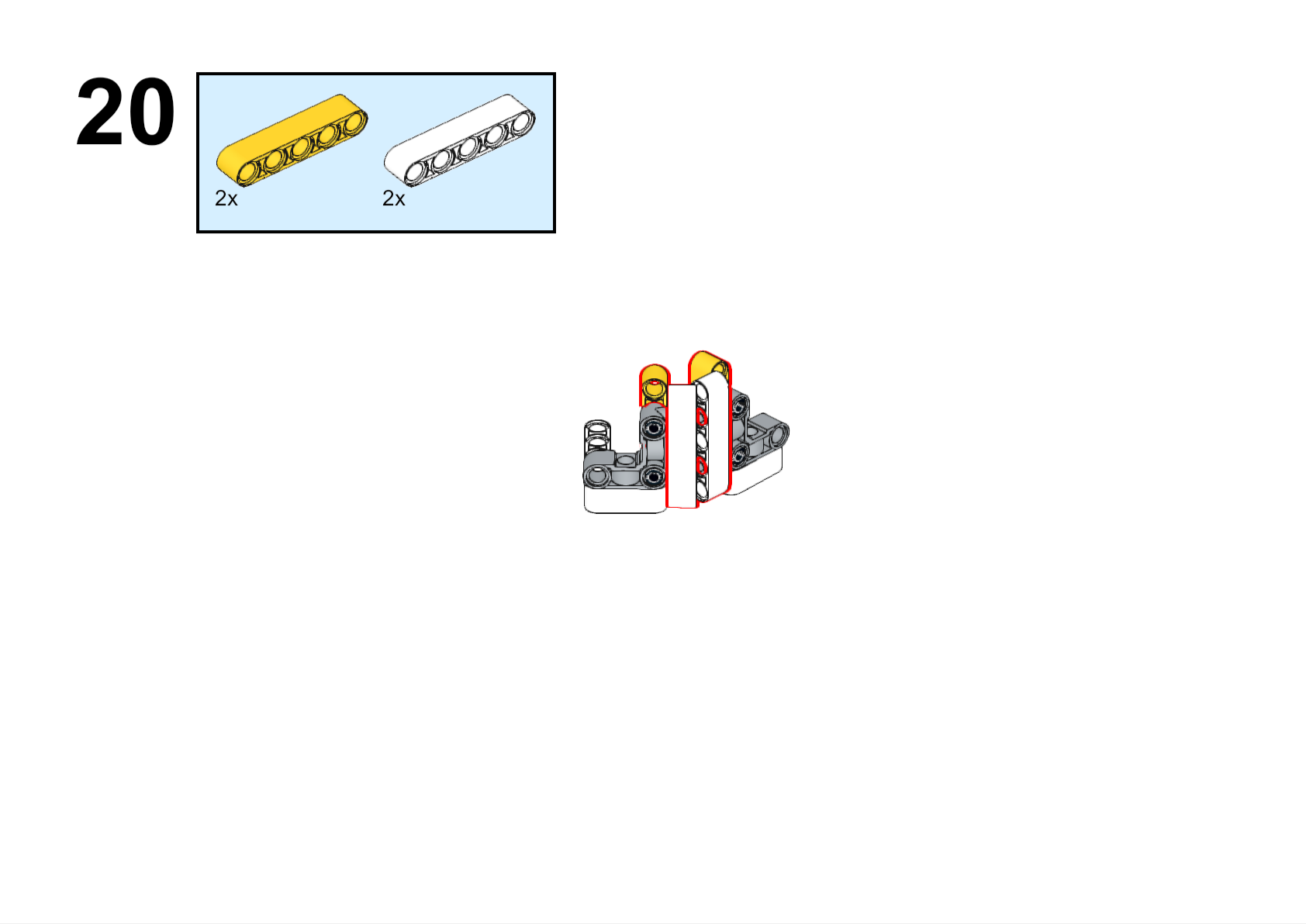
Assembly Steps
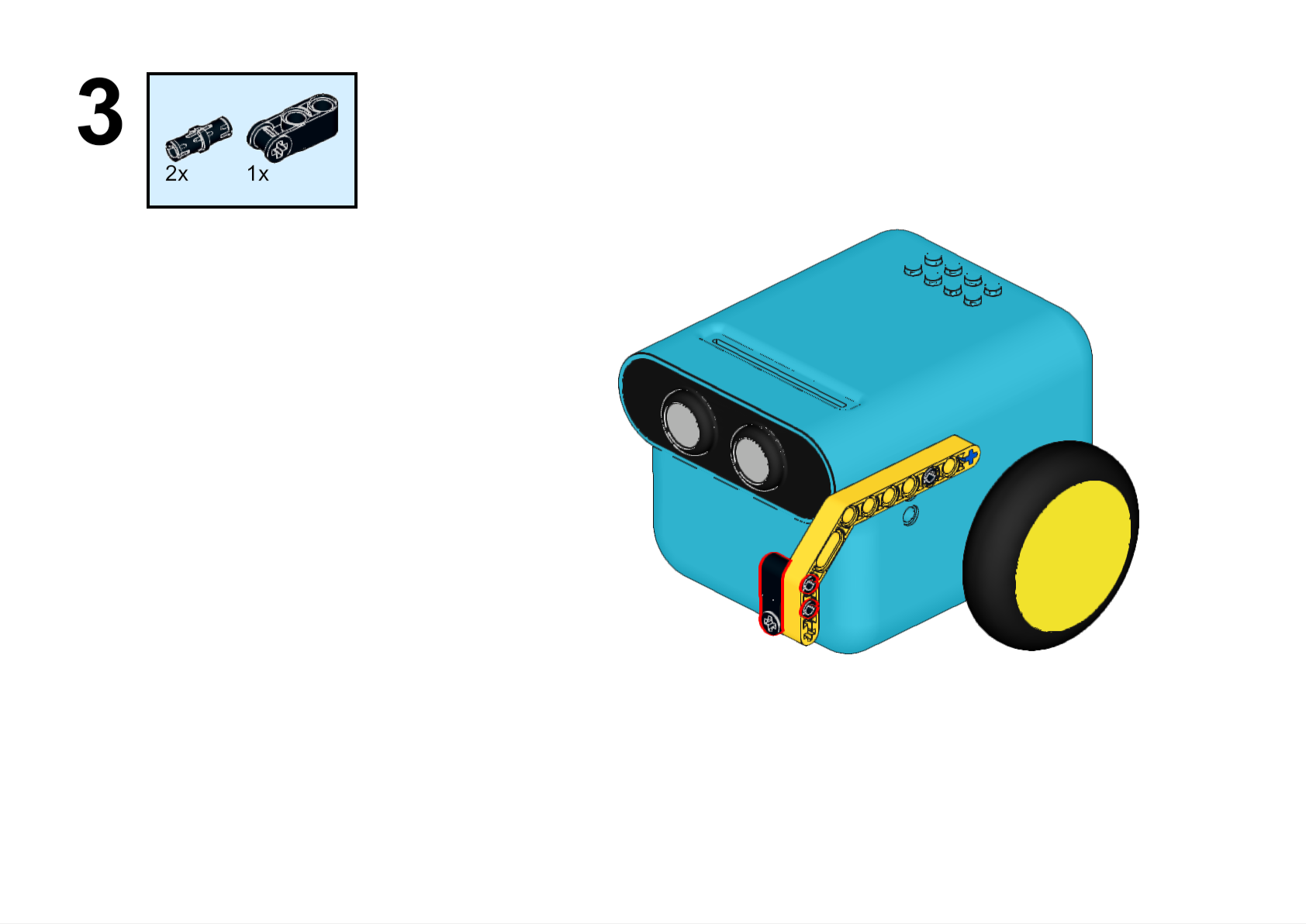
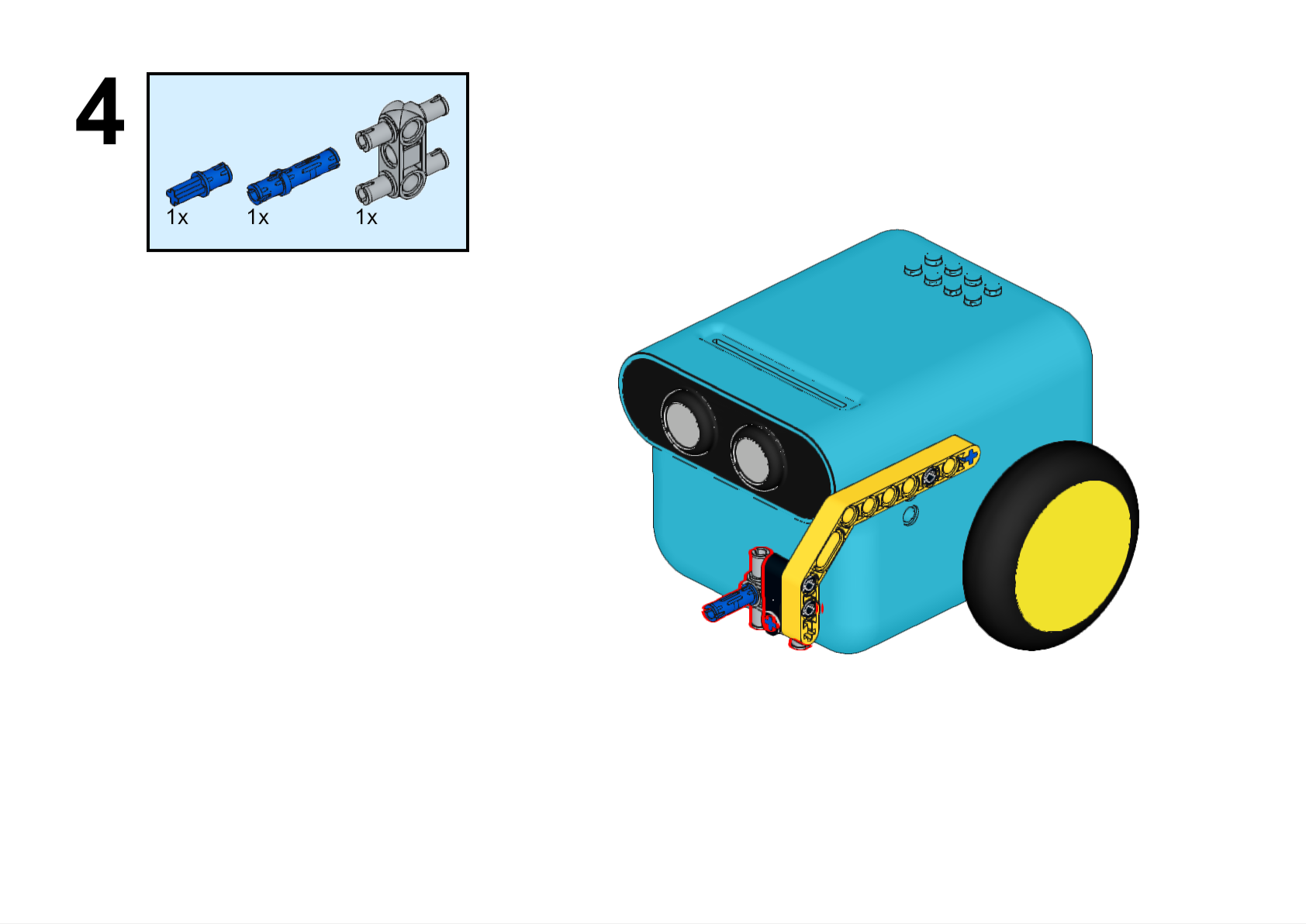
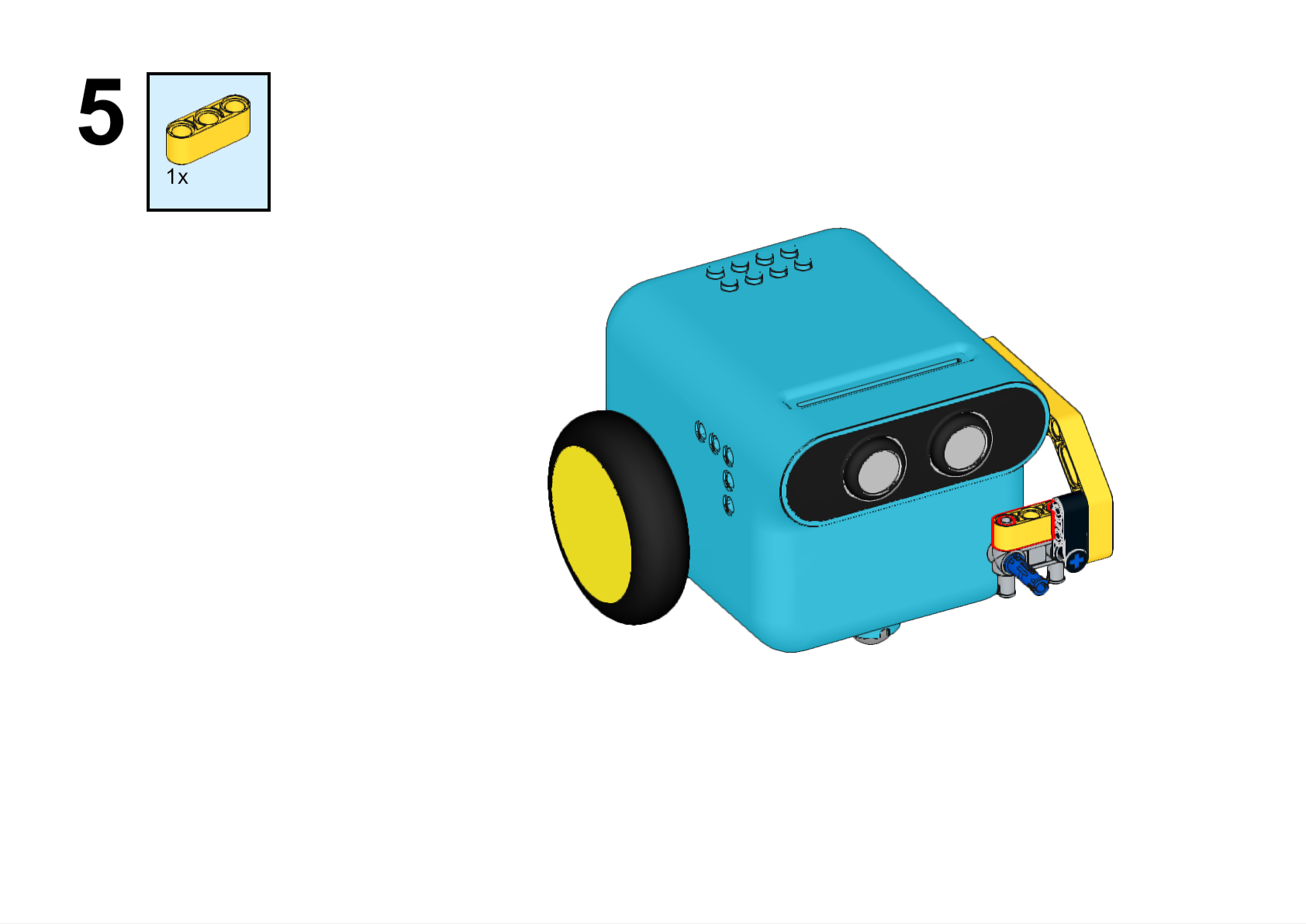
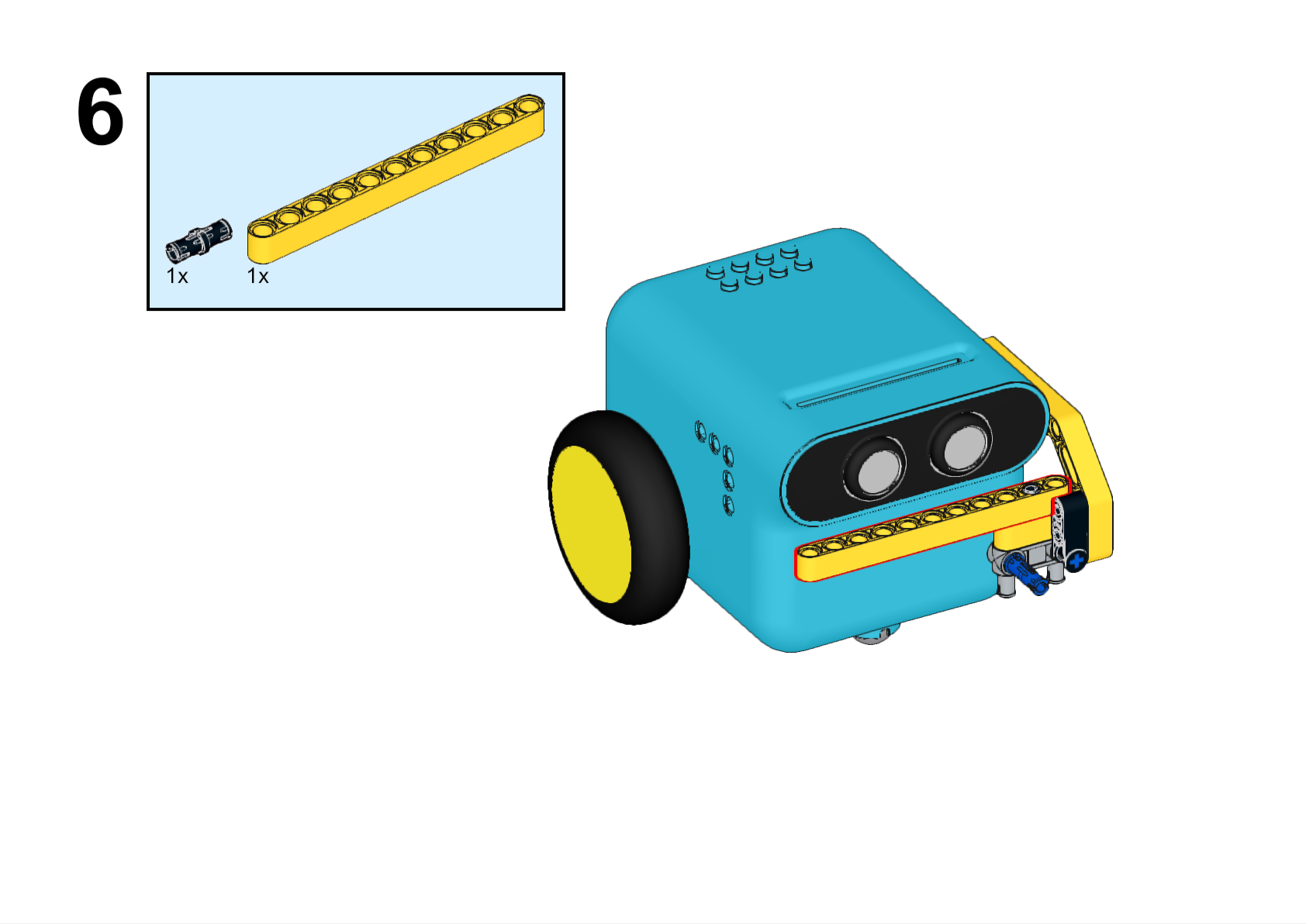

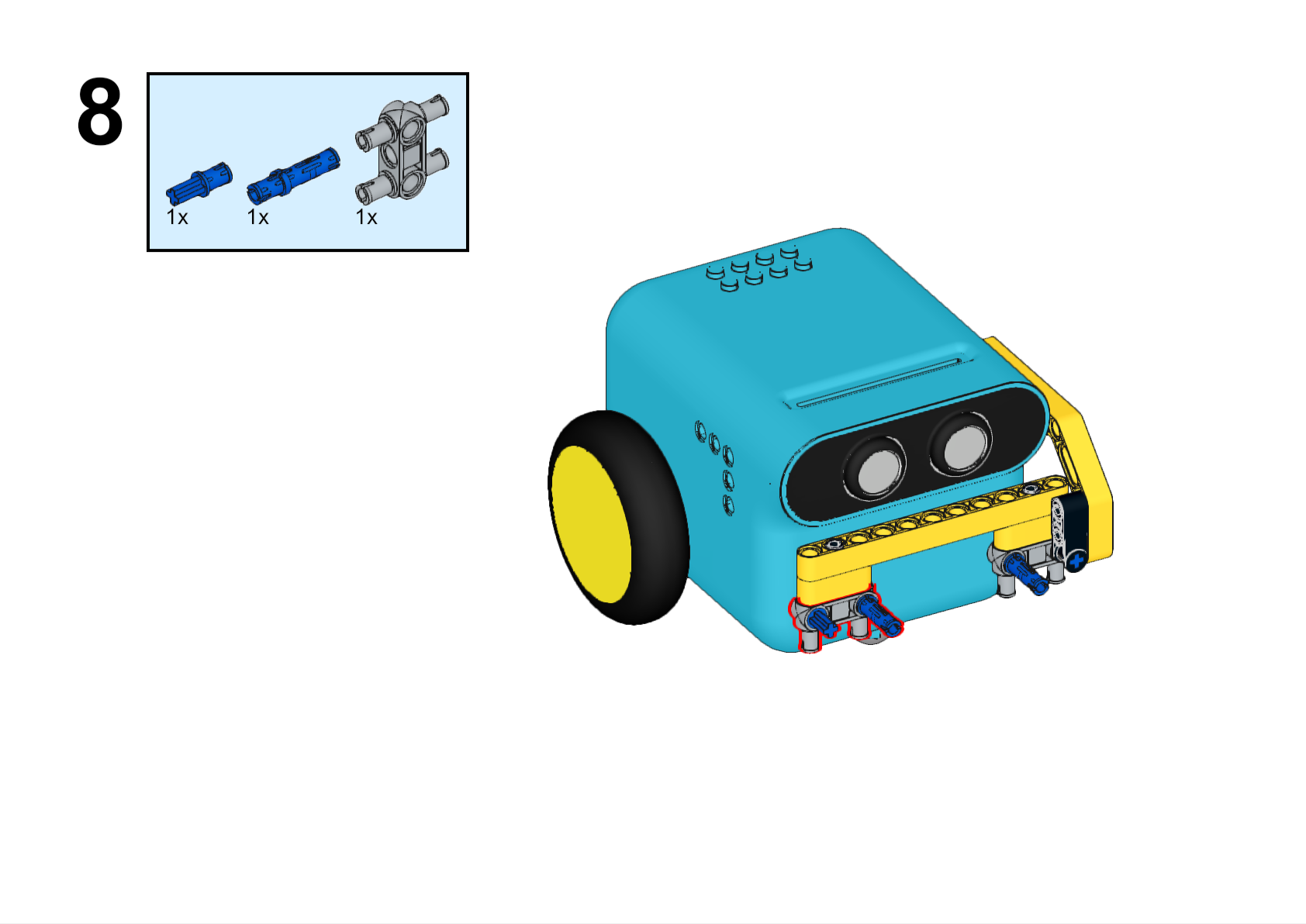
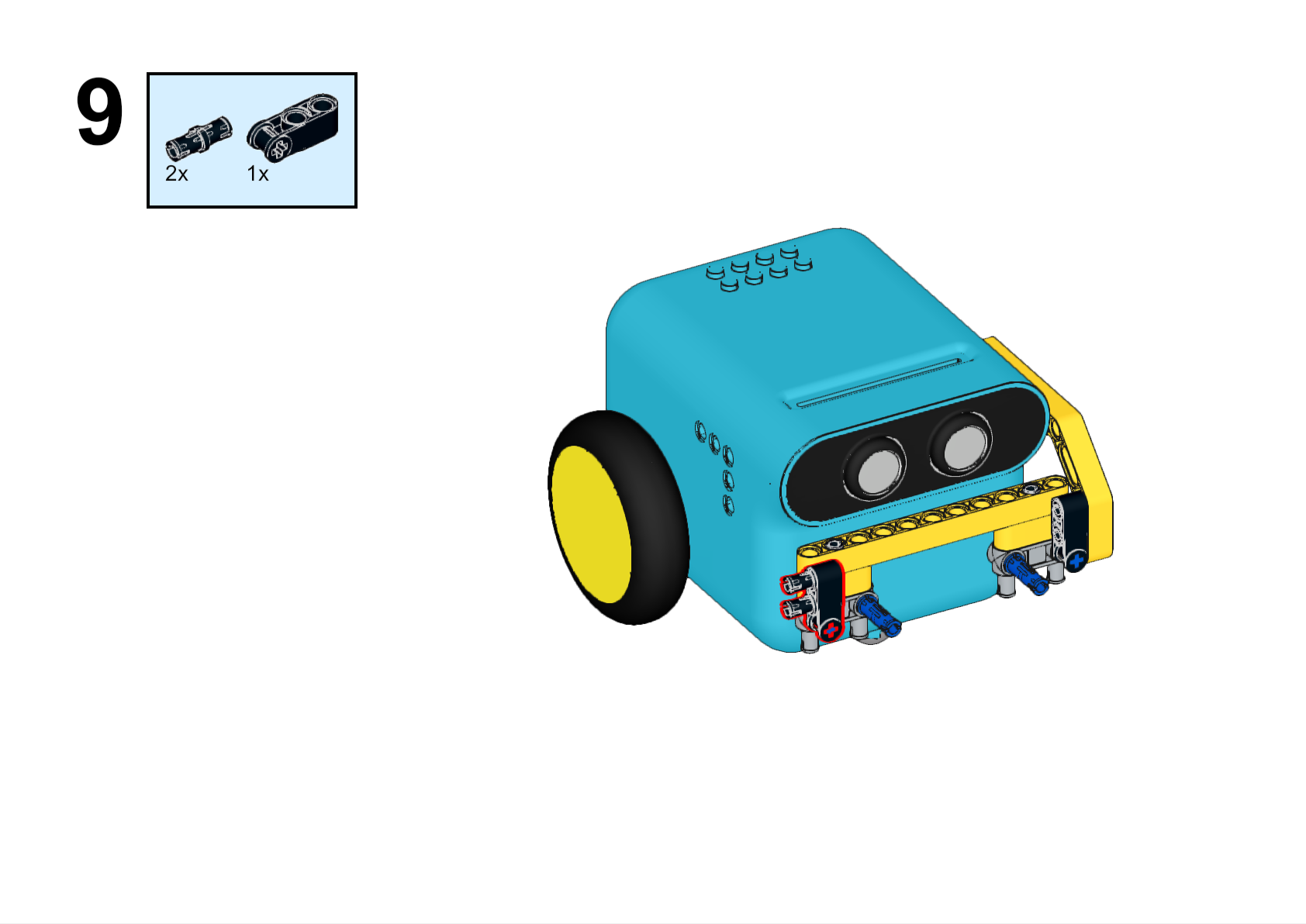
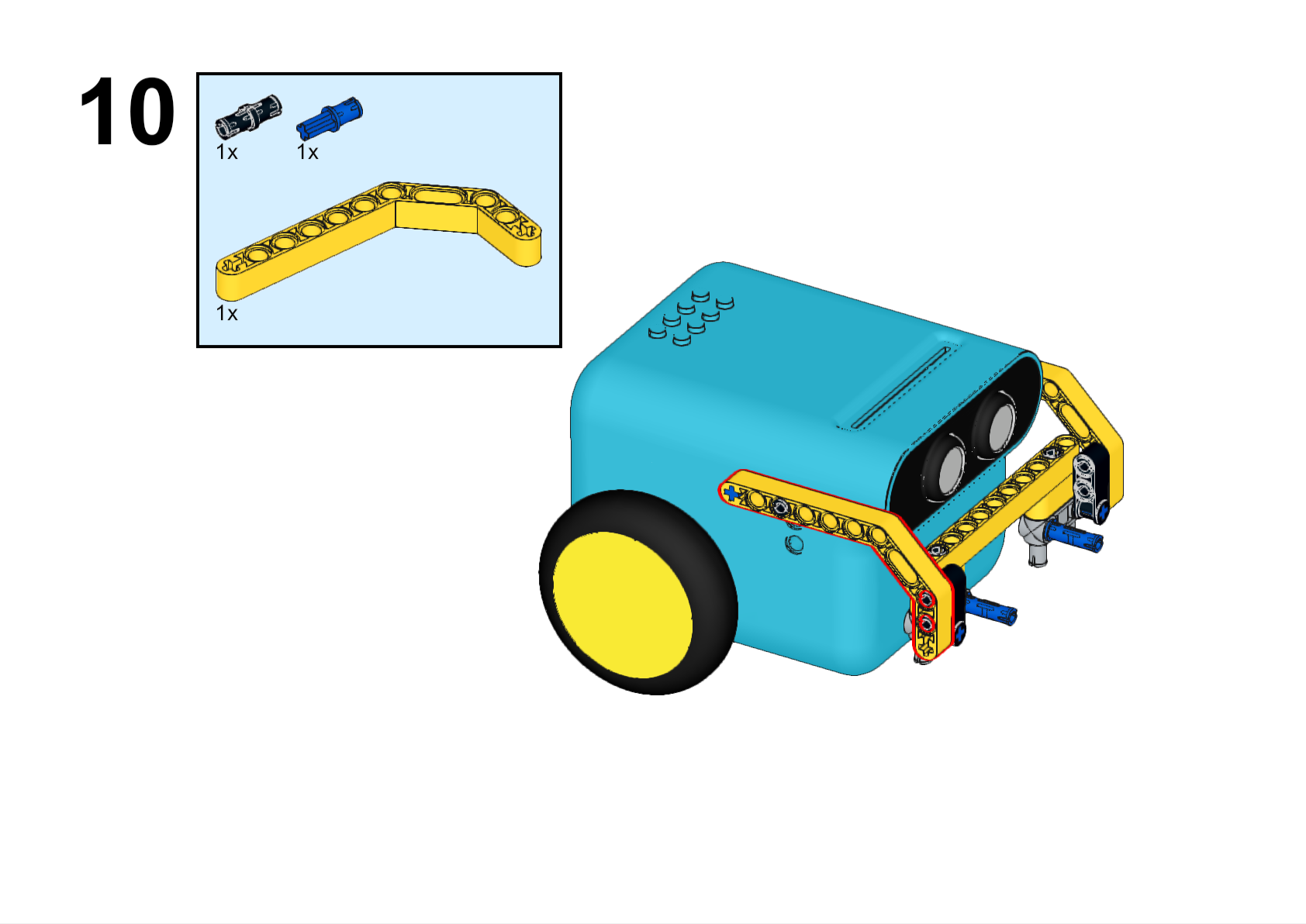
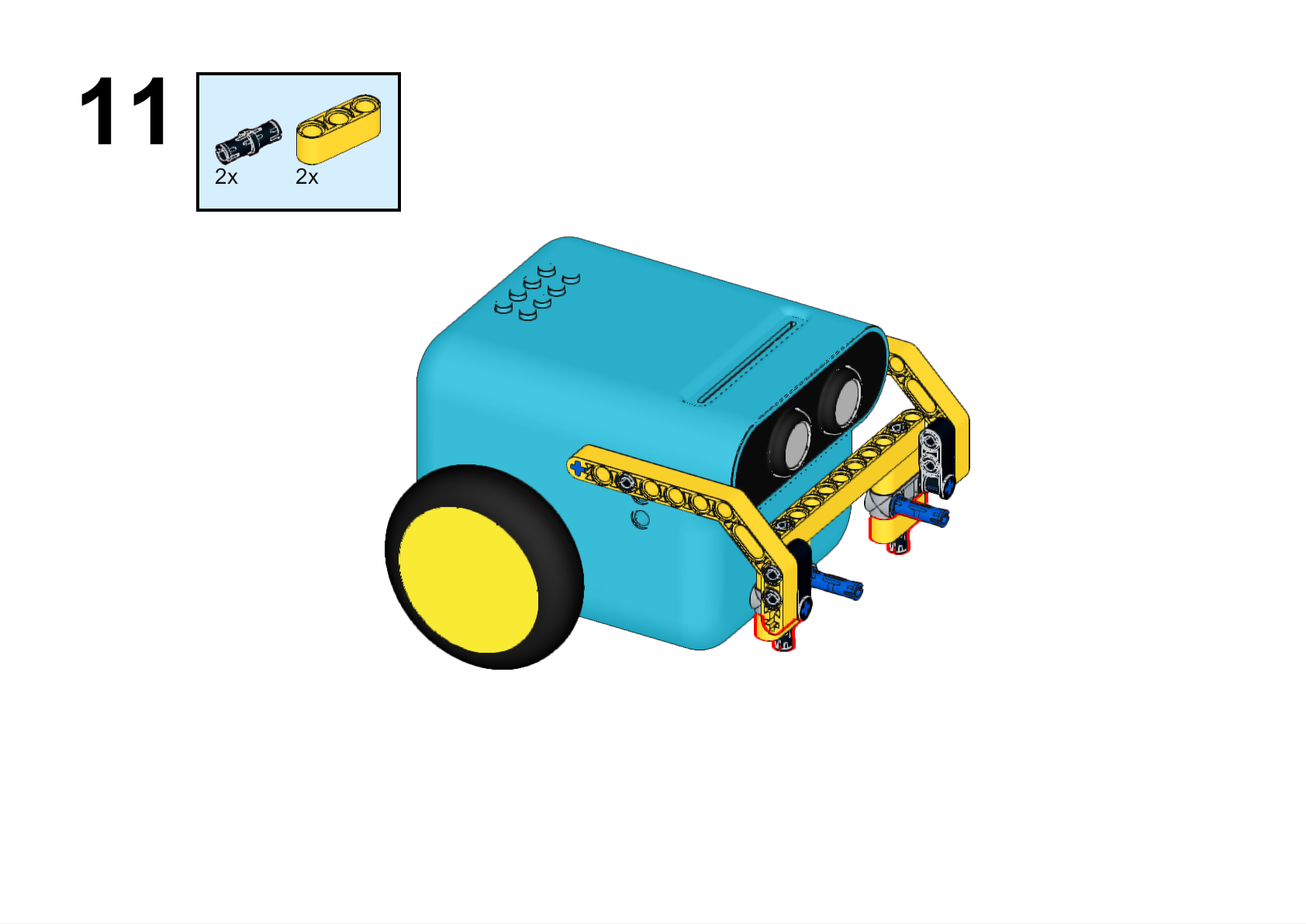

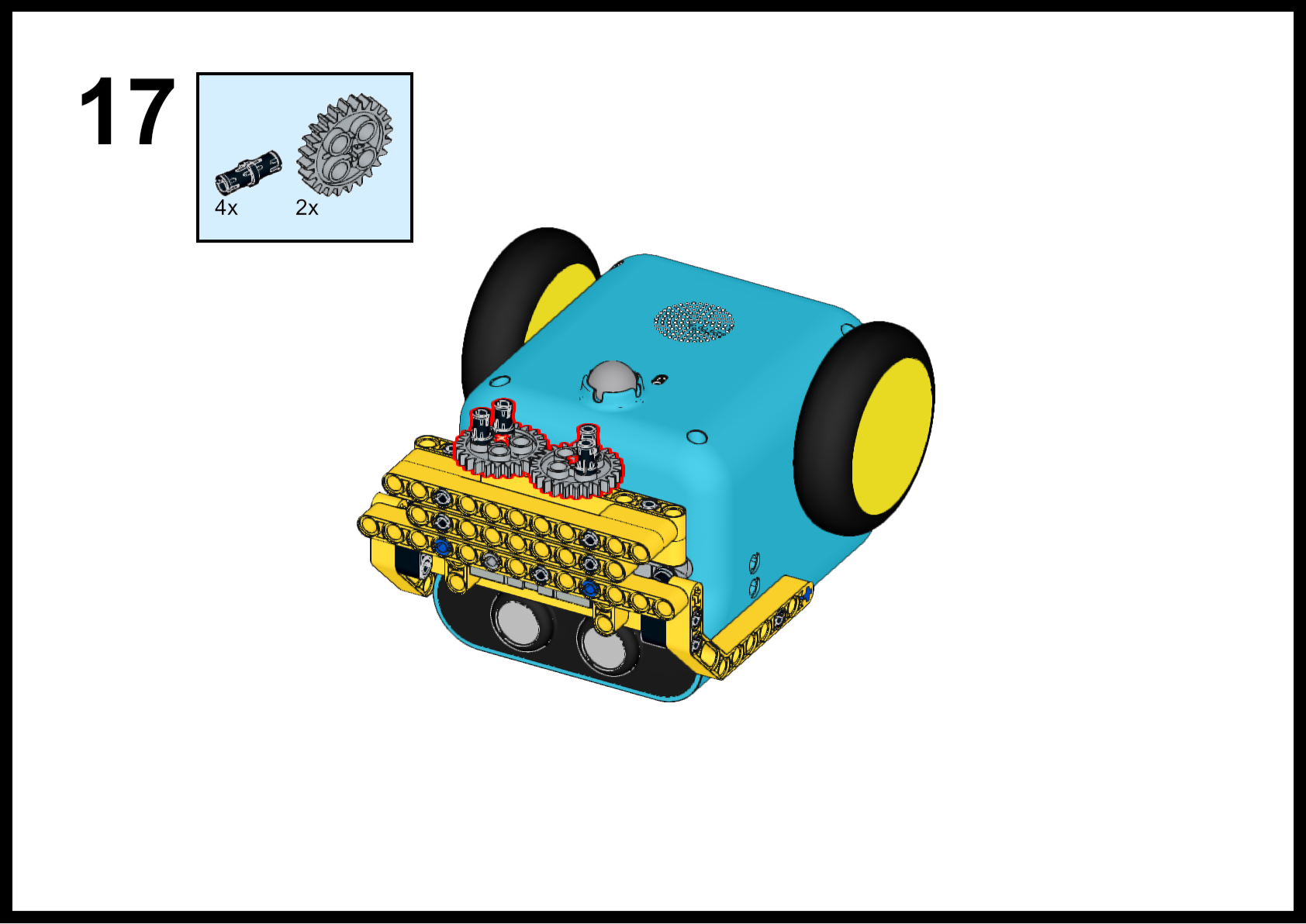
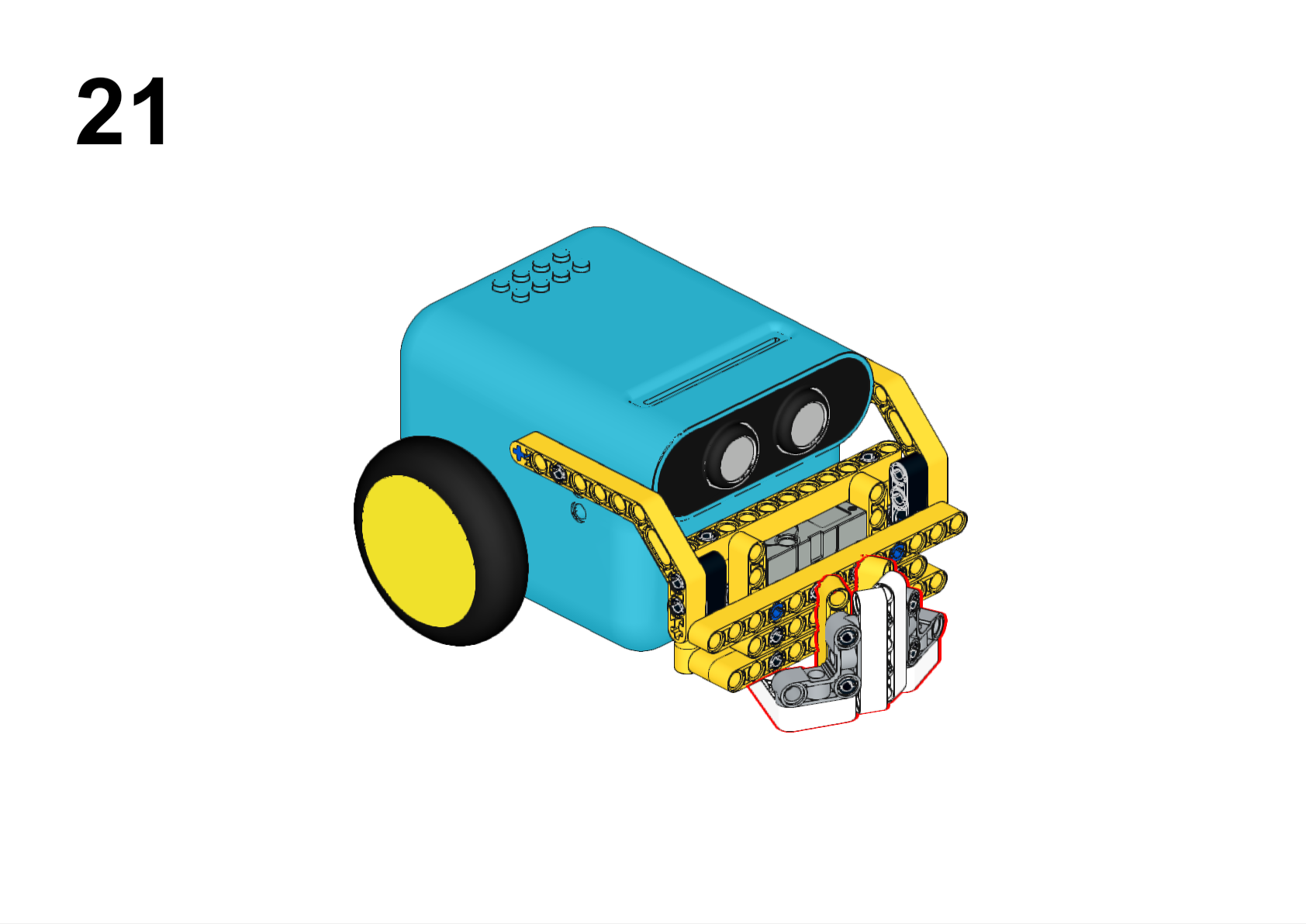
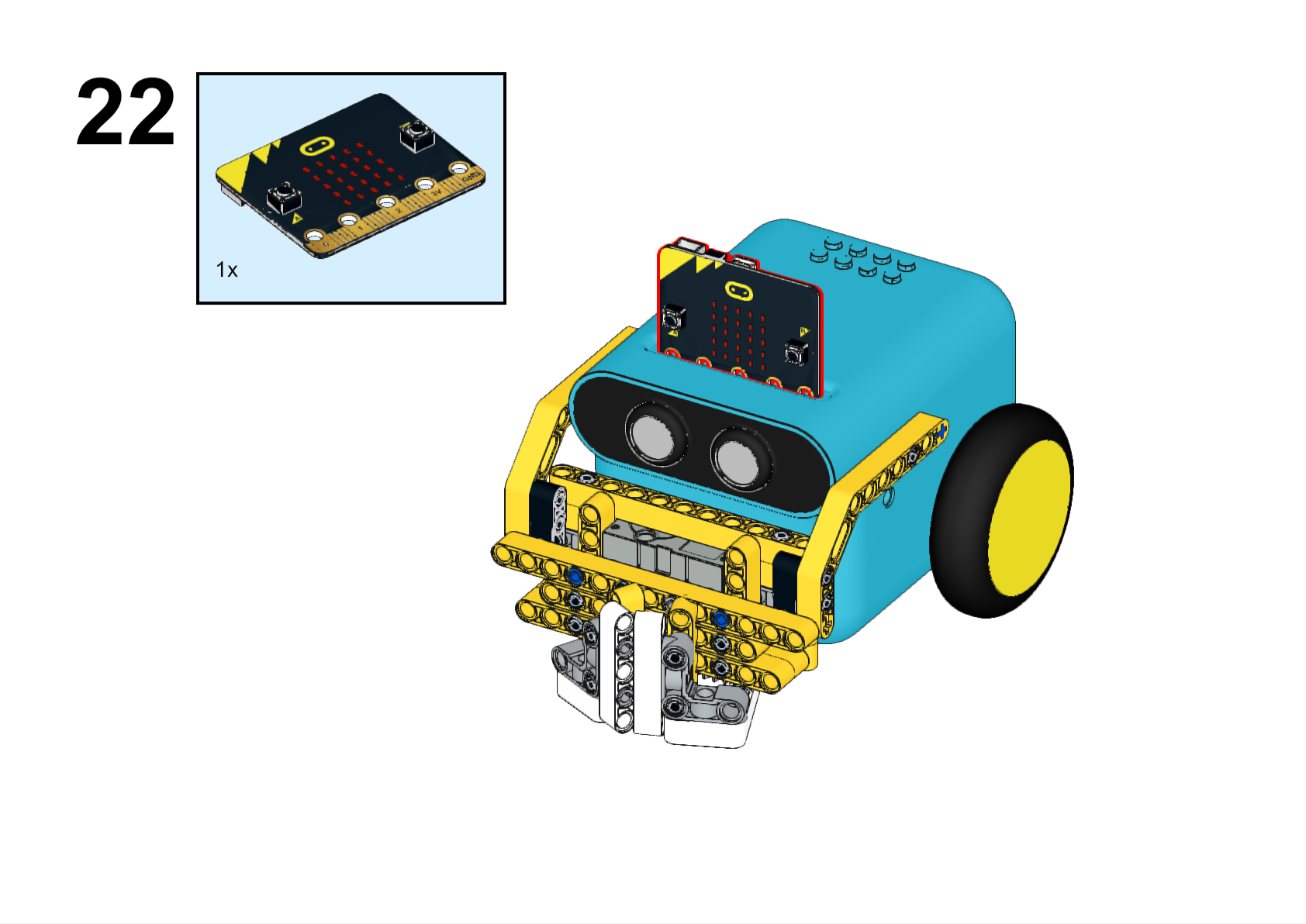
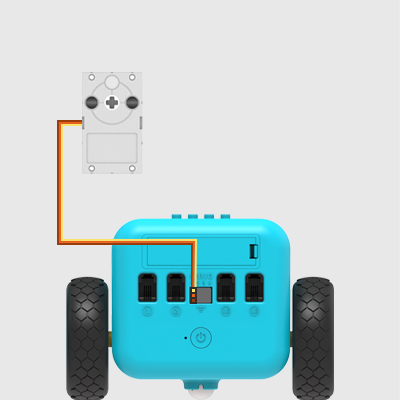
Hardware Connections
Connect the 360° servo to servo 1 port on the TPBot.
Software
Program
Click "Advanced" in the makecode drawer to see more choices.
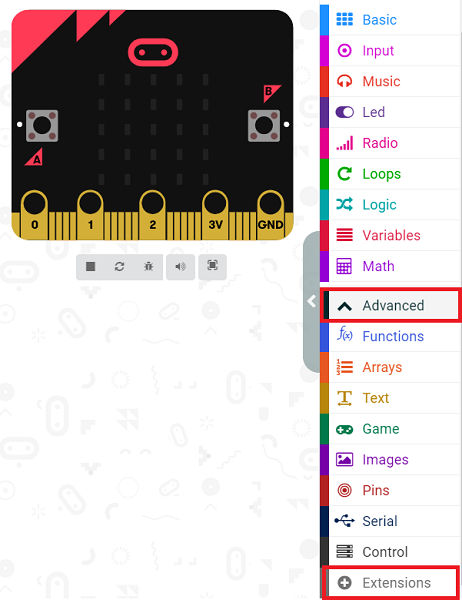
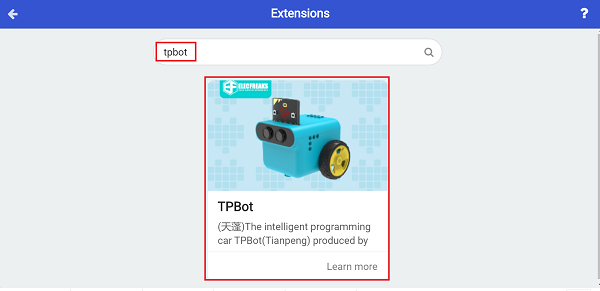
For programming the TPBot, we need to add the extensions. Click "Extensions" at the bottom of the drawer and search with tpbot in the box, then download it.
Samples program
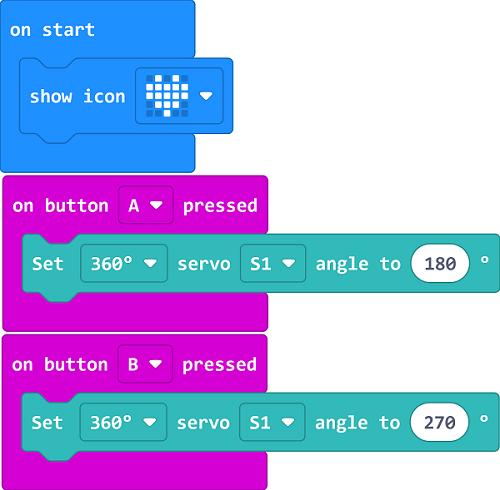
While on start, set to show an icon, while pressing button A, set the servo connecting to S1 to drive to 225 degrees; while pressing button B, set the servo to drive to 255 degrees.
Program
Reference link: https://makecode.microbit.org/_KkpX7WXgicLp
You may download it directly here:
Conclusion
While pressing button A, the claw grasps the object; while pressing button B, the claw releases it.