Case 08: Run Along the Black Line
Purpose
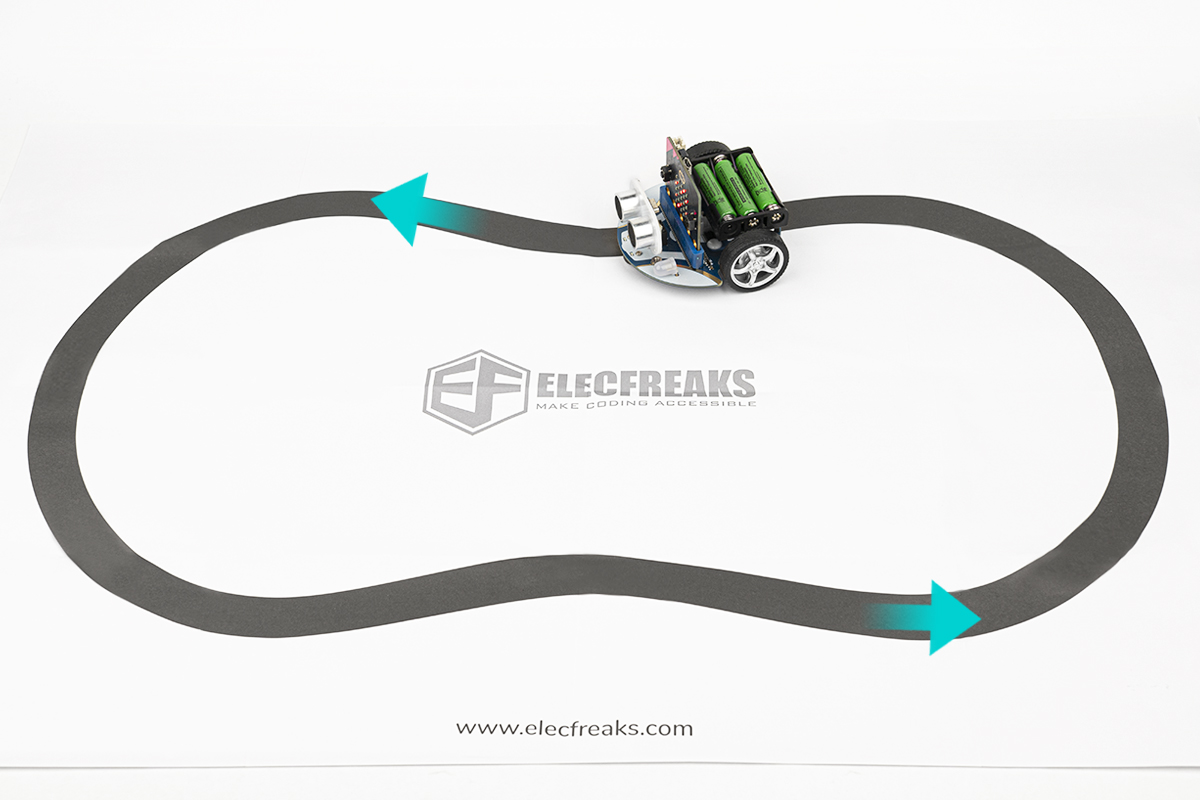
The Cutebot runs along the black line.
Materials
1 x Cutebot kit
1 x Line-tracking Map(Homemade or enclosed in the Cutebot kit
Software Platform
Programming
Step 1
Click the "Advanced" to see more choices in the MakeCode drawer.
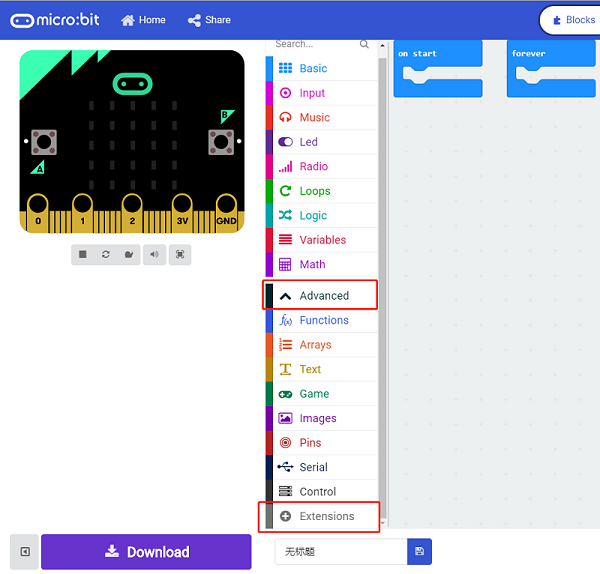
A codebase is required for Cutebot programming, click “Add Package” at the bottom of the drawer, search Cutebot in the dialogue box and download it.
Note: If you met a tip indicating incompatibility of the codebase, you can continue with the tips or build a new project there.
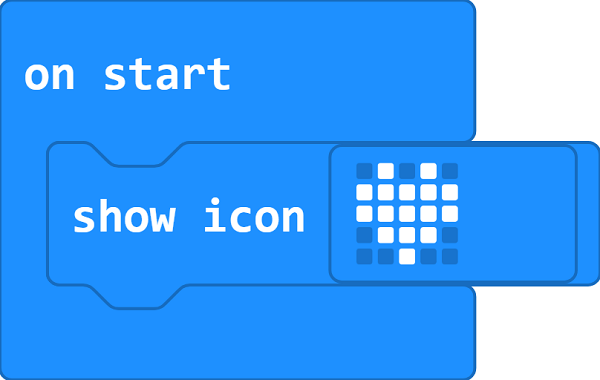
Step 2
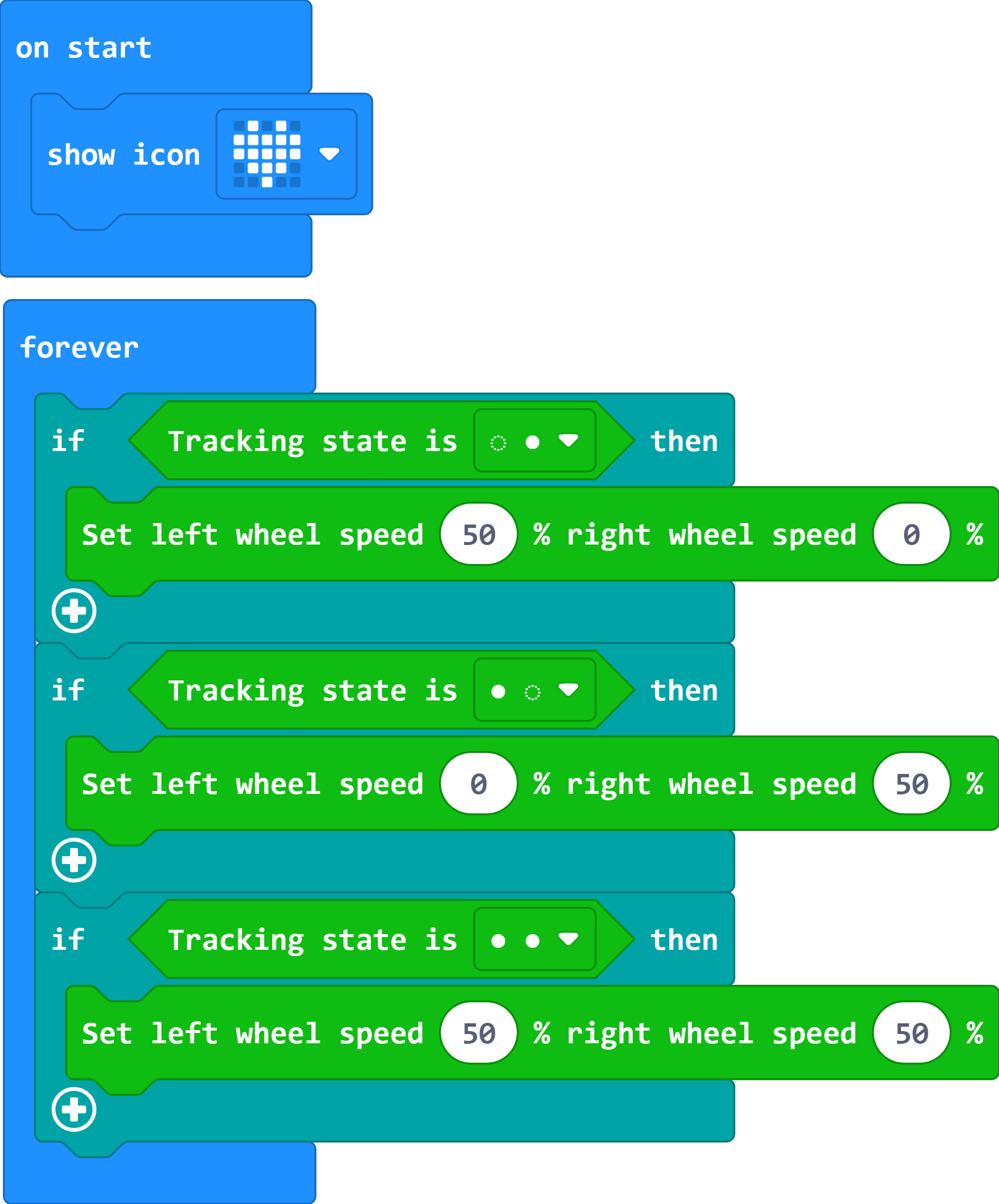
Choose "show icon" in the On startbrick.
Step 3
Drag three if bricks into the Forever brick.
Judge if the status of line-tracking sensors is ○ ●, saying the left probe doesn't detect the black line while the right probe detects the black line.
Set the left wheel speed to 50 and right to 25, make a right turn by the different speed of the two wheels and go back to the black line.
Judge if the status of line-tracking sensors is ● ○ and make a left turn to go back to the black line.
When the status is ● ● that means the Cutebot runs along with the black line at the speed of 50.
Programming
Links: https://makecode.microbit.org/_1A0PqrDTDTp3
You can also download it directly below:
Result
The Cutebot runs along the black line and will adjust to run back to the black line if any deviation happens.
Exploration
How to program to make the Cutebot run in the white background of the map excluding the black line circle part?