Cases Libraries
Robots Themes

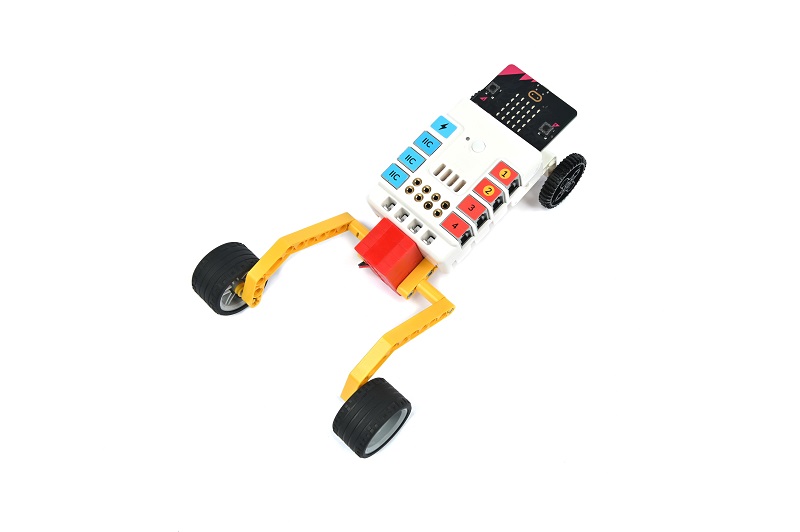
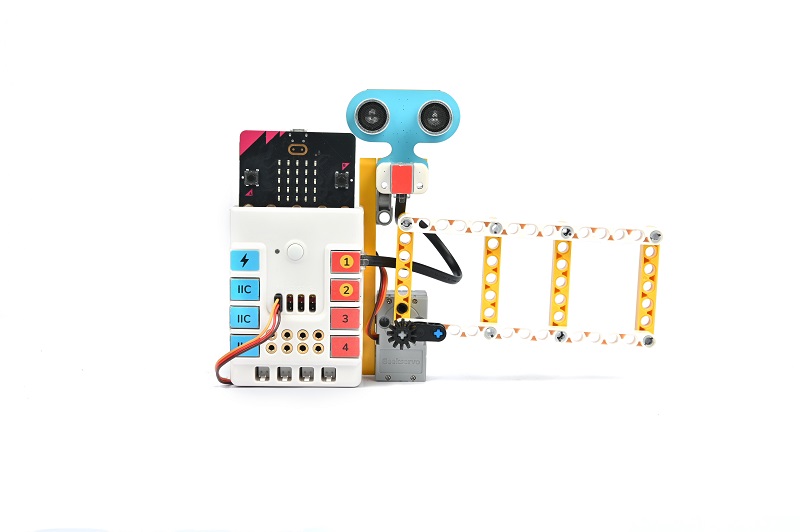
The Pull Ups
Pull-ups are exercises where you use your own strength to pull your body up to a bar and then lower it back down, repeating it several times. It is a great exercise for the body and can make our back, shoulders and arms stronger. Pull-up exercises also make our bodies more upright and toned. In this lesson we will use the Nezha Inventor's Kit V2 to create a robot that can do pull-ups.
The Swimming Robot
Swimming is a sport and skill in which you float in the water by your own power and move forward through the water with the movement of your own limbs. Competitive swimming is the second largest sport in the Olympic Games and includes: butterfly, backstroke (also known as backstroke), breaststroke, jibe (also known as freestyle), four strokes of racing, and synchronised swimming. There are many benefits to swimming, such as toning, cardiorespiratory fitness, relaxation and improved confidence. Swimming is also a low-impact exercise that can reduce joint and bone damage. In this lesson we will use the Nezha Inventor's Kit V2 to create a robot that simulates the sport of swimming.

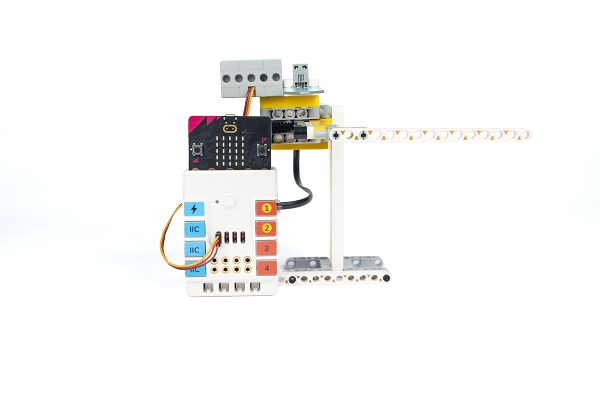
The Weight Lifting Robot
Weightlifting involves lifting a barbell with two discs above your head with both hands and seeing who can lift the heaviest barbell. It sounds easy, but it is actually very difficult because weightlifting requires not only great strength, but also great skill, a very steady balance and a high level of coordination. Furthermore, weightlifting also requires a very strong psychological profile and willpower, as there is a lot of pressure and challenges to face when lifting weights.Lifting weights can make us physically stronger, more flexible and healthier, and it can also make our self-confidence and self-esteem higher.Today we will use the Nezha Inventor's Kit V2 to create a robot that can simulate weightlifting movements.

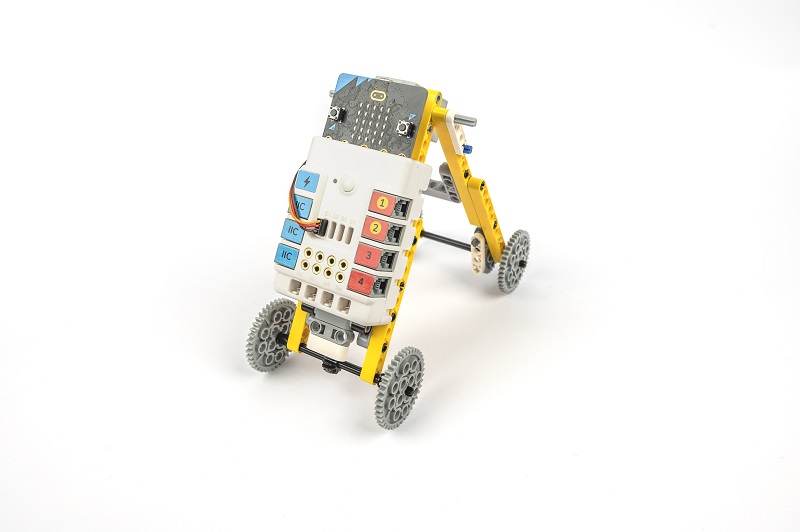
The Unicycle Robot
Unicycle tightrope walking is an extremely challenging and exciting performance art. It combines balance, co-ordination and skill, allowing people to watch in awe as the performers demonstrate extraordinary balance and precise control in a highly stressful environment.In this performance, the performer rides a unicycle (a special vehicle with only one wheel) across a high suspended wire. This wire is usually suspended between two supports and the height and distance needs to be precisely measured and adjusted to ensure the performer's safety.The performers need to maintain their balance during the performance and use subtle body adjustments to keep the unicycle stable on the wire. They need to be highly focused and ready to respond to challenges posed by external factors such as wind, vibrations or small changes in their own posture. Even the slightest imbalance can cause a performer to fall or lose their balance.We're building a unicycle robot today with the Nezha Inventor's Kit V2.

The Kaleidoscope Robot
Kaleidoscope painting is an art form inspired by traditional kaleidoscope installations. In this type of painting, artists use a variety of colourful materials and techniques to create fascinating kaleidoscopic effects. They create optical illusions and visual feasts through detailed patterns, cyclical geometric shapes and strong colour contrasts. Kaleidoscope paintings often reveal gorgeous and mysterious images that bring the viewer a psychedelic and wondrous artistic experience.In this lesson, students will learn how to use the Nezha Inventor's Kit V2 to create a kaleidoscopic robot that can draw different patterns. Through this case, we will learn the principles of motor control, programming concepts and the integration of art and science. Through hands-on building and practice, students will develop creativity, problem-solving skills and teamwork.

The Dance Robot
Dancing is an expressive and artistic body language. Through graceful movements and a sense of rhythm, dancers are able to convey emotions, stories and ideas. There are many different forms of dance, including contemporary, ballet, jazz and street dance. Whether it is a professional performance on stage or a free dance at a large family gathering, dancing can evoke passion and joy within people. It is not only a form of physical expression, but also a form of cultural transmission and communication. Dancing is a way to build physical fitness and improve co-ordination, and it also gives people the opportunity to relax and release stress. Whether you are a dancer or an audience member, dancing is a wonderful artistic feast that allows people to enjoy the beauty and joy that dance brings.This course aims to introduce students to the principles of motor control, the use of gearing and the effect of the centre of gravity on balance through the creation of a dancing robot with the Nezha Inventor's Kit V2. Students will have hands-on experience building a dancing robot and learn how to use gearing and control motors to achieve the robot's dancing movements. Through this project, students will develop creativity, problem-solving skills and teamwork ability.

The Crawling Robot
Crawling is a common form of locomotion in the animal world. We can observe that many animals such as snakes, spiders and geckos have a unique way of crawling. They move forward through coordinated body movements, contraction and extension of their muscles and friction with the ground. The way these animals crawl has a certain regularity, but also shows their individual characteristics and flexibility.The aim of this course is to introduce students to the principles of motor control and the application of gearing by creating an example of a crawling robot. Students will use the materials in Nezha Inventor's Kit V2 to build a crawling robot and learn how to achieve the crawling action of the robot by controlling the motors and gearing. Through this project, students will develop creativity, problem solving skills and teamwork spirit.

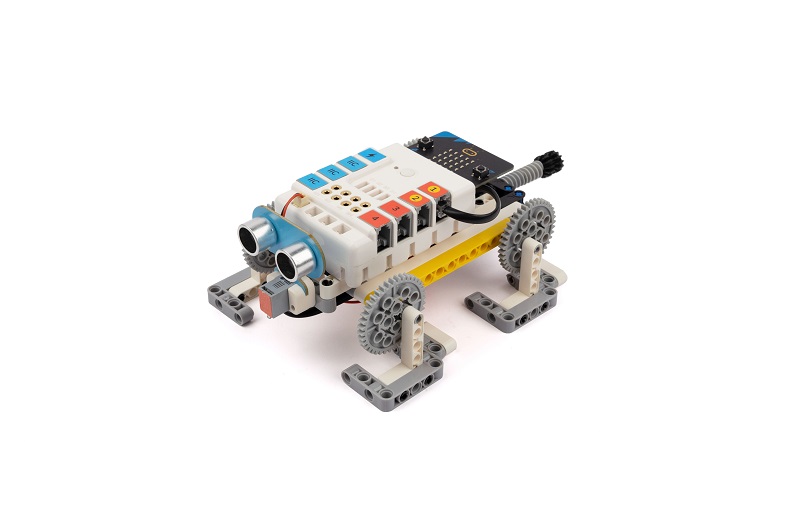
The Walking Robot
Walking is one of the most basic and common forms of locomotion in the animal world. We can observe that many animals such as humans, cats and dogs have their own unique way of walking. They achieve a stable walking movement by moving their limbs in a coordinated manner and adjusting their body balance. Different animals have different gait and posture, showing their own characteristics and flexibility.In this project, we will try to imitate the walking movements of animals by designing and building a robot that can simulate their steps. Using the materials in Nezha Inventor's Kit V2, we will build the structure of the robot and control its movement with a motor. At the same time, we will learn and apply the principles of gearing to achieve coordinated movements and walking motions of the robot.
Animals Themes

The Scorpion Robot
Scorpions are striking arthropods that belong to a family of arachnids. They live in all corners of the earth, including desert, forest and grassland environments. Scorpions usually have a long body and a pair of curved tails, often with a venomous stinger at the end. Their physical appearance shows a variety of colours and patterns, ranging from light yellow to dark brown or black.Scorpions feed on insects, arachnids and other small invertebrates. They have a well-developed sensory system, especially their antennae and eyes, which help them locate and capture prey in the dark. The scorpion's venomous stinger contains toxins and is generally used for defence and to capture food.We'll be making a scorpion today with the Nezha Inventor's Kit V2.
The Mechanical Crawler
Caterpillars are small insect larvae which usually have soft and hairy bodies. Caterpillars are the larval stage of insects such as butterflies and moths, in which they prepare to become adults by feeding and growing. The caterpillar's body consists of a number of segments, each with a pair of legs through which they crawl.Caterpillars crawl by wriggling through their bodies. Their legs move alternately, thus propelling the body forward. This way of crawling allows the caterpillar to crawl freely on a variety of surfaces such as leaves, branches and the ground.We will use the Nezha Inventor's Kit V2 to create a mechanical crawler that mimics the way a caterpillar moves.

The Crab Robot
Crabs are creatures that live in the sea and fresh water and have hard shells and powerful pincers. Crabs move mainly by walking laterally and they crawl through the coordinated movement of their legs. In this lesson we will learn about the characteristics and behaviour of crabs and try to make a mechanical crab that mimics the crab's crawl.

The Prawns Robot
Prawns are invertebrates that live in the water and have hard shells and long tentacles. Prawns move in a sweeping motion, clearing their surroundings of food with their powerful pincers and arms. In this lesson we will learn about the characteristics and behaviour of Prawns and try to make a mechanical prawn that resembles a shrimp in shape.
The Dog Robot
Dogs are one of man's closest companions and are common pets. They come in different breeds and appearances, including large dogs, medium-sized dogs and small dogs. Dogs usually have four legs, a keen sense of smell and hearing, and they are intelligent, loyal and friendly. Dogs are faithful companions to humans, sharing our joys and sorrows, providing comfort and companionship.In this lesson, we will explore interesting facts about dogs together and make a mechanical puppy using the Nezha Inventor's Kit V2. Through this project, we will learn how to use motors and other components, understand the basic principles of mechanical dynamics, and develop our creativity and problem-solving skills.
Fun Cases
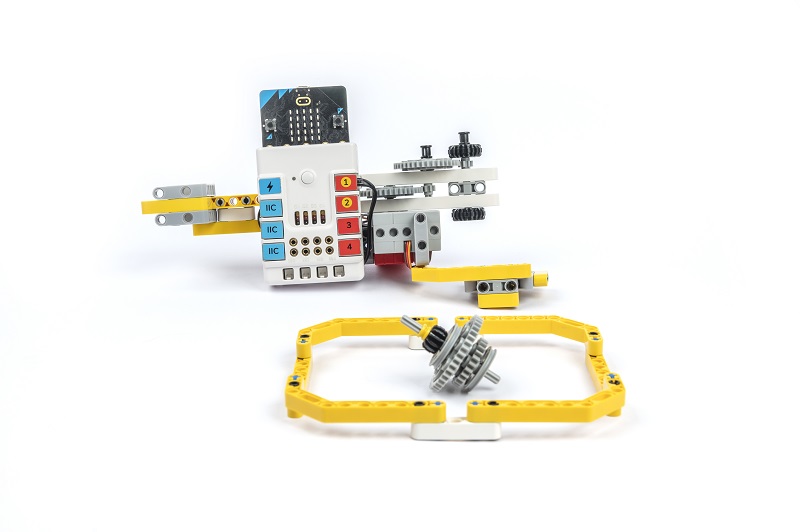
The Gyro Launcher
A gyro is a spinning toy that has many interesting properties. Have you ever heard of a gyroscope? A gyroscope can keep spinning steadily, sometimes even standing on a spiky top and spinning! In ancient times, gyros were also used as a tool for games and competitions. In this lesson we will learn about gyroscopes and try to make a gyro launcher to help us speed up and stabilise the rotation of the gyroscope.

The Robotic Arm
A robotic arm is a mechanical device that can mimic the movements of a human arm. It can play an important role in industry, medicine, science and other fields. In this course we will learn the basic principles of a robotic arm and use the Nezha Inventor's Kit V2 to create a powerful robotic arm.
The Seesaw
A seesaw is a classic amusement ride that is able to use the principle of leverage to achieve balance at both ends. In this lesson we will learn how a seesaw works and use Nezha Inventor's Kit V2 to create a seesaw that can swing.
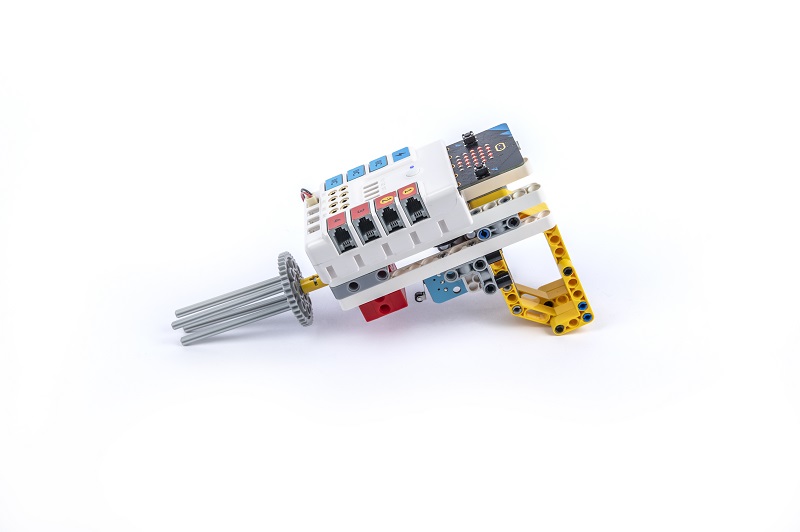
The Egg Beater
A whisk is a common kitchen tool that quickly and efficiently breaks up eggs and makes them fluffy and homogeneous. In this lesson, we will learn together how to make a fun whisk using the Nezha Inventor's Kit V2.

The Oscillating Fan
The oscillating fan is a common household appliance that is capable of distributing the wind more widely by swinging its head. In this lesson, we will learn how to make a bobbing fan that can automatically bob and spin its head using the Nezha Inventor's Kit V2.
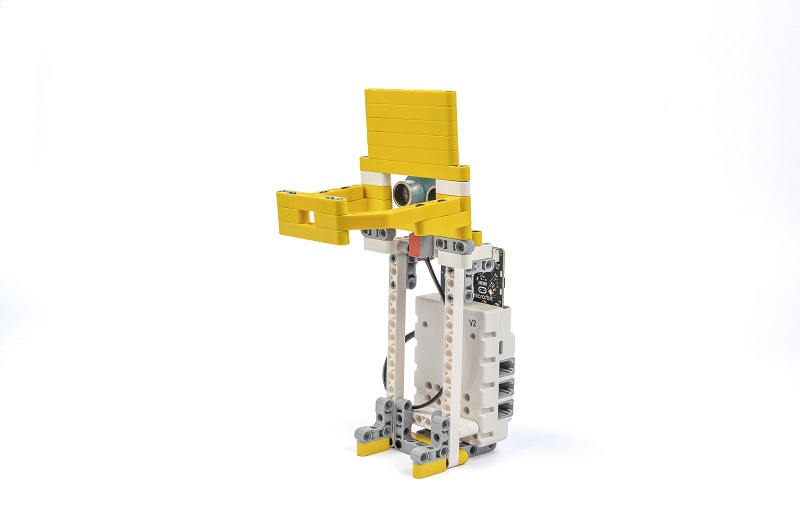
Counting Basketball Frame
In this project, we will use Nezha Inventor Kit V2 to make a model basketball hoop that will automatically count the number of goals scored. We will learn how the ultrasonic sound sensors work, the circuit connections, programming and apply them to the model basketball hoop.

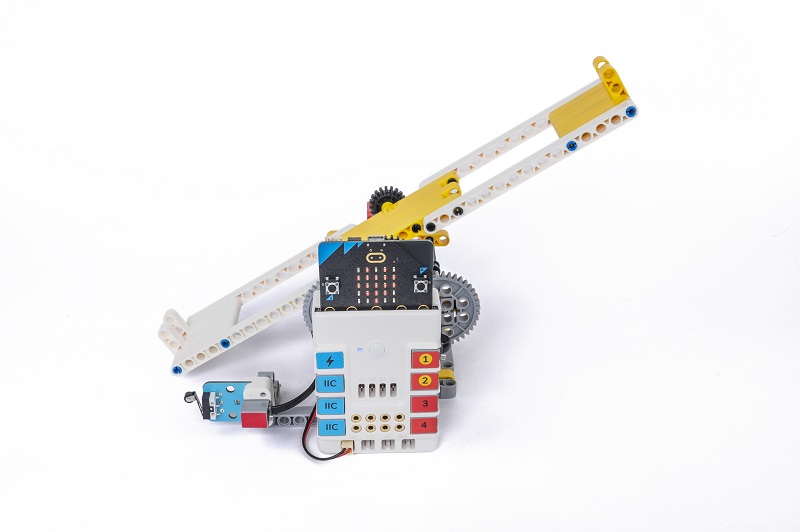
The Shooting Device
A shooting device is a device that helps us to shoot baskets automatically. In this lesson we will learn about the leverage principle and create a simple shooting device using Nezha Inventor's Kit V2. We will learn how the leverage principle works and how to use it to achieve the action of shooting a basketball.
Cart Themes

The Forklift 1
A forklift truck is a mechanical device used to carry and lift objects. In this lesson, we will learn about the ease of deformation of parallelograms and the parallelism of opposite sides after deformation, and build a simple forklift truck mechanism using Nezha Inventor's Kit V2. We will explore the properties of parallelograms and how they can be used to design and build a mechanical structure that enables the movement of a forklift truck.

The Forklift 2
A forklift truck is a mechanical device that can carry and lift objects. In this course we will learn about the rack and pinion drive and build a simple model of a forklift truck using Nezha Inventor's Kit V2. We will explore the principles and applications of the rack and pinion drive and understand its role in a forklift mechanism.
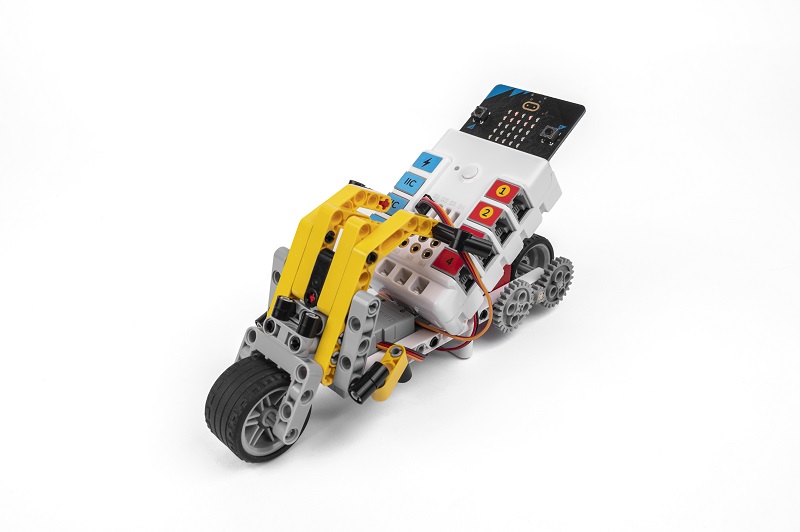
The Motorcycle
Motorcycles are a unique and swift form of transport. In this course we will learn about gearing and build a simple motorbike model by using the Nezha Inventor's Kit V2.

The Excavator
An excavator is a powerful construction vehicle that enables a great deal of excavation and handling work. In this course, we will learn about worm gears and build a simple model of an excavation vehicle by using the Nezha Inventor's Kit V2. We will explore the principles and applications of the worm gear drive and learn how it works in an excavation vehicle.
The Obstacle Avoidance Car 1
In this course, we will work together to build a smart obstacle avoidance vehicle, using the Nezha Inventor's Kit V2 and ultrasonic sound sensors to enable the vehicle to automatically detect and avoid obstacles in front of it. Through this project, we will learn how ultrasonic sound sensors work and apply them to the design and construction of real robots.

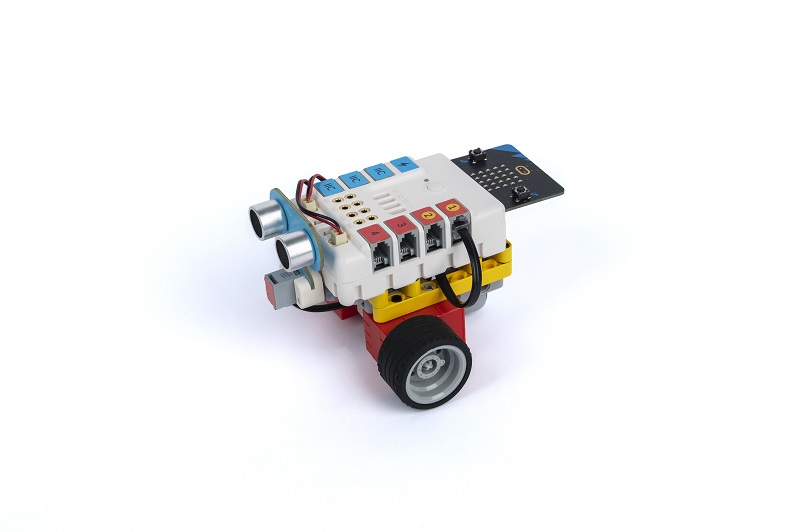
The Obstacle Avoidance Car 2
In this course, we will work together to build a smart obstacle avoidance vehicle, using the Nezha Inventor's Kit V2, an ultrasonic sound sensor and the technology of a tiller to control steering. We will learn how the ultrasonic sound sensor works and understand how it helps the robot to sense its surroundings, as well as explore the knowledge points of the car's front axle structure to enable the vehicle's steering function. Through this project, we will develop creativity, problem solving and teamwork skills while learning about the application of robotics and the principles of mechanical construction.

The Smart Line Following Car
This course will take students to build a line following car that will enable the vehicle to follow a black line using the Nezha Inventor's Kit V2 and dual line following sensors. Through this project, students will learn about the working principles and applications of line following sensors, develop problem solving skills and creative thinking, and learn about the use of robotics in automated navigation.

The Obstacle Avoidance Line Following Car
In this project we will use the Nezha Inventor's Kit V2 to build a smart cart that can not only patrol along a black line, but also avoid obstacles while doing so. We will learn how the dual line following sensors and ultrasonic sound sensors work and apply them to the creation of the cart.
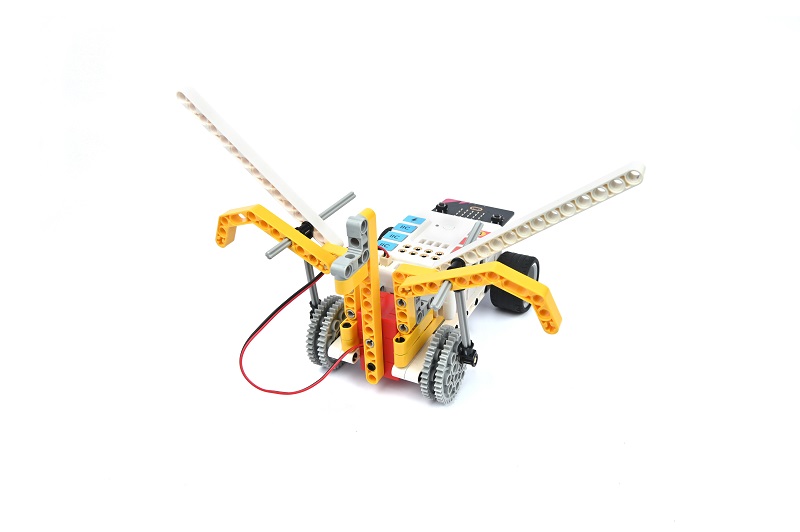
The Flying Car
In this project we will use the Nezha Inventor's Kit V2 to build a winged cart that simulates the flight movements of a bird. We will learn about mechanical construction, motor control and creative design and apply them to the creation of the cart.
Smart Life Themes
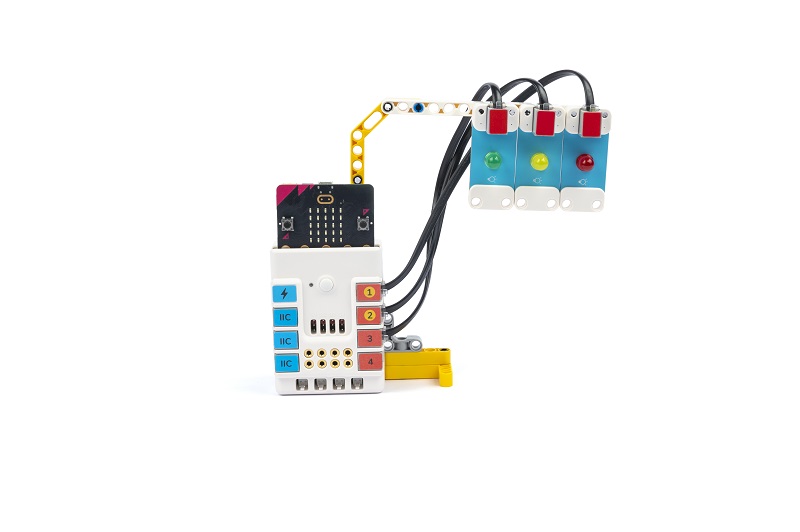
The Traffic Light
In this project we will be making a model of a traffic light using the Nezha Inventor's Kit V2. We will learn about the control and programming of LED lights and apply them to the production of a traffic light.
The Ultrasonic Sound Gate
In this project we will be making an ultrasonic gate model using the Nezha Inventor's Kit V2. We will learn how ultrasonic sensors work, programming and other knowledge and apply it to the model of the gate.
The Smart Clothes Rack
In this project, we will use the Nezha Inventor's Kit V2 to make a model of a smart drying rack. We will learn how the soil moisture sensor works, programming and other knowledge and apply it to the model drying rack. The drying rack automatically contracts when rain is detected by the soil moisture sensor above the unit, and extends when the soil moisture sensor above the unit does not detect rain.