Case 13 The Dog Robot
Introduction
Dogs are one of man's closest companions and are common pets. They come in different breeds and appearances, including large dogs, medium-sized dogs and small dogs. Dogs usually have four legs, a keen sense of smell and hearing, and they are intelligent, loyal and friendly. Dogs are faithful companions to humans, sharing our joys and sorrows, providing comfort and companionship.
In this lesson, we will explore interesting facts about dogs together and make a mechanical puppy using the Nezha Inventor's Kit V2. Through this project, we will learn how to use motors and other components, understand the basic principles of mechanical dynamics, and develop our creativity and problem-solving skills.
Teaching Objectives
- Learn about the basic characteristics and behavioural habits of dogs.
- Master the basic components and use of the Nezha Inventor's kit V2.
- Learn how to use the motors and other components to create a mechanical puppy.
- Understand the basic principles of mechanical dynamics, such as gearing and motion control.
- Develop teamwork, creativity and problem solving skills.
Teaching Preparation
Teaching Process
Introduce
Introduce students to the background and objectives of mechanical puppy making to stimulate their interest and curiosity.
In this lesson we will explore the wonderful world of mechanical fabrication and make an exciting mechanical puppy together. Are you interested in both mechanics and dogs?
Imagine what a fun experience it would be if we could create a mechanical puppy that could mimic the movements of a real dog! Through this project, we will learn how to make a mechanical puppy using the Nezha Inventor's Kit V2, an exciting STEAM tool.
In making the mechanical puppy, we will cover many interesting points such as mechanical construction, electronic components and programming.
Exploration
Discuss in small groups and get students thinking about how they can make a mechanical puppy using block materials.
- How can the motors and other components in Nezha Inventor's Kit V2 be used to achieve the movement of the mechanical puppy?
- How can the movements of the mechanical puppy be controlled by programming it to mimic the behaviour of a real dog?
- Is the movement of the mechanical puppy affected by the centre of gravity and gearing? How can we optimise the design to achieve better movement?
Practice
Work in groups to create a mechanical puppy from block materials according to your own design.
Build a mechanical puppy out of blocks according to your own design.
Examples
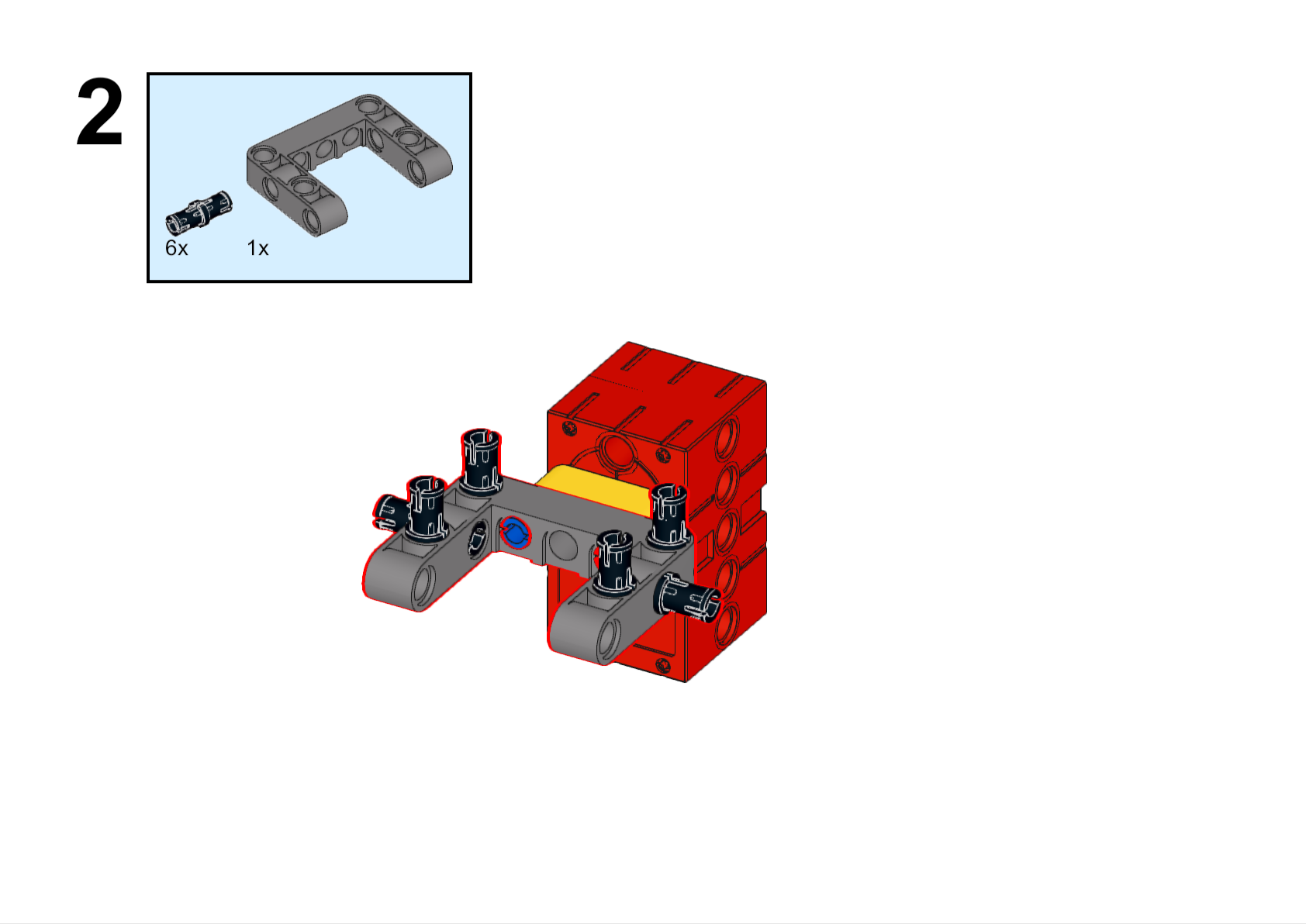
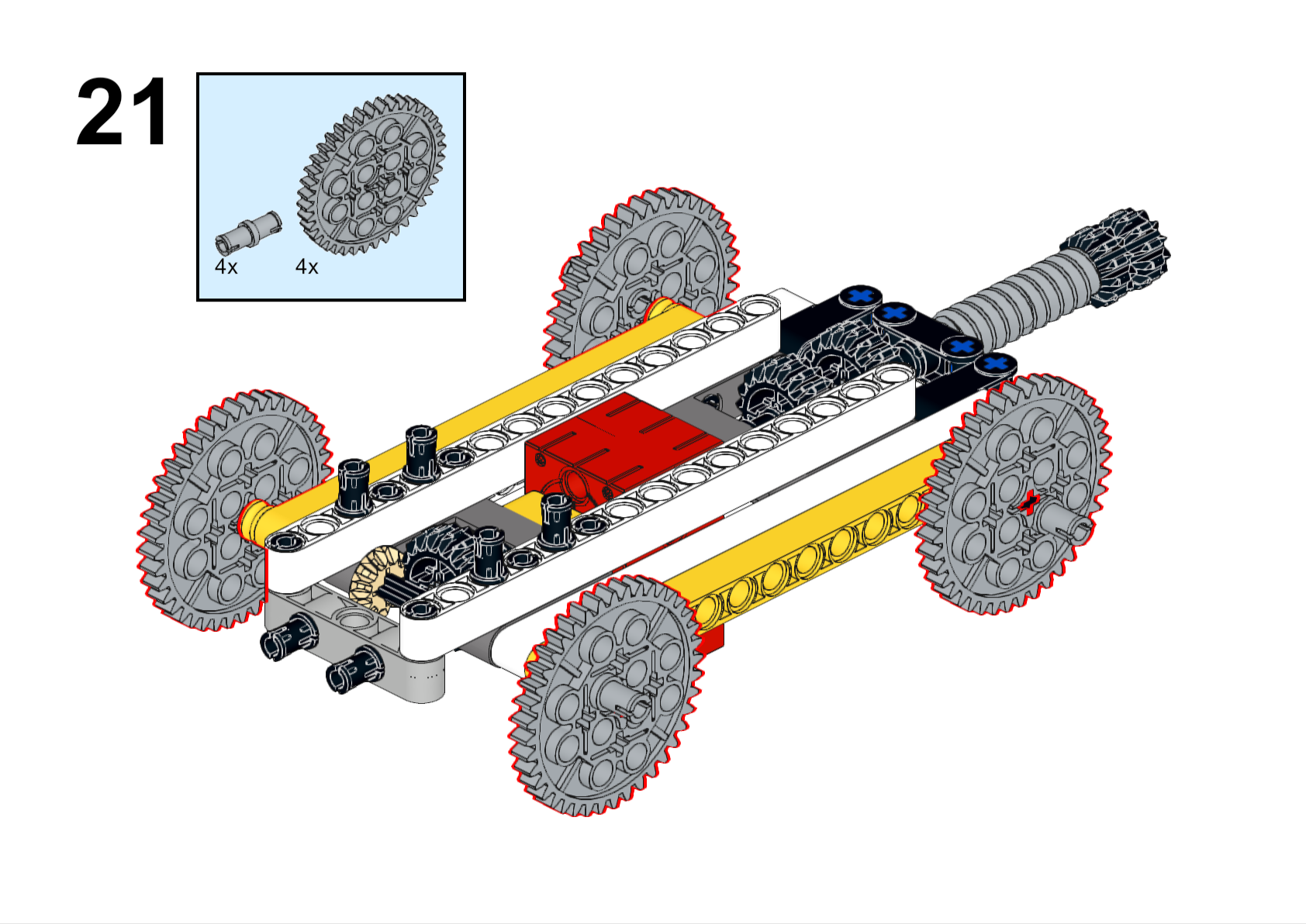
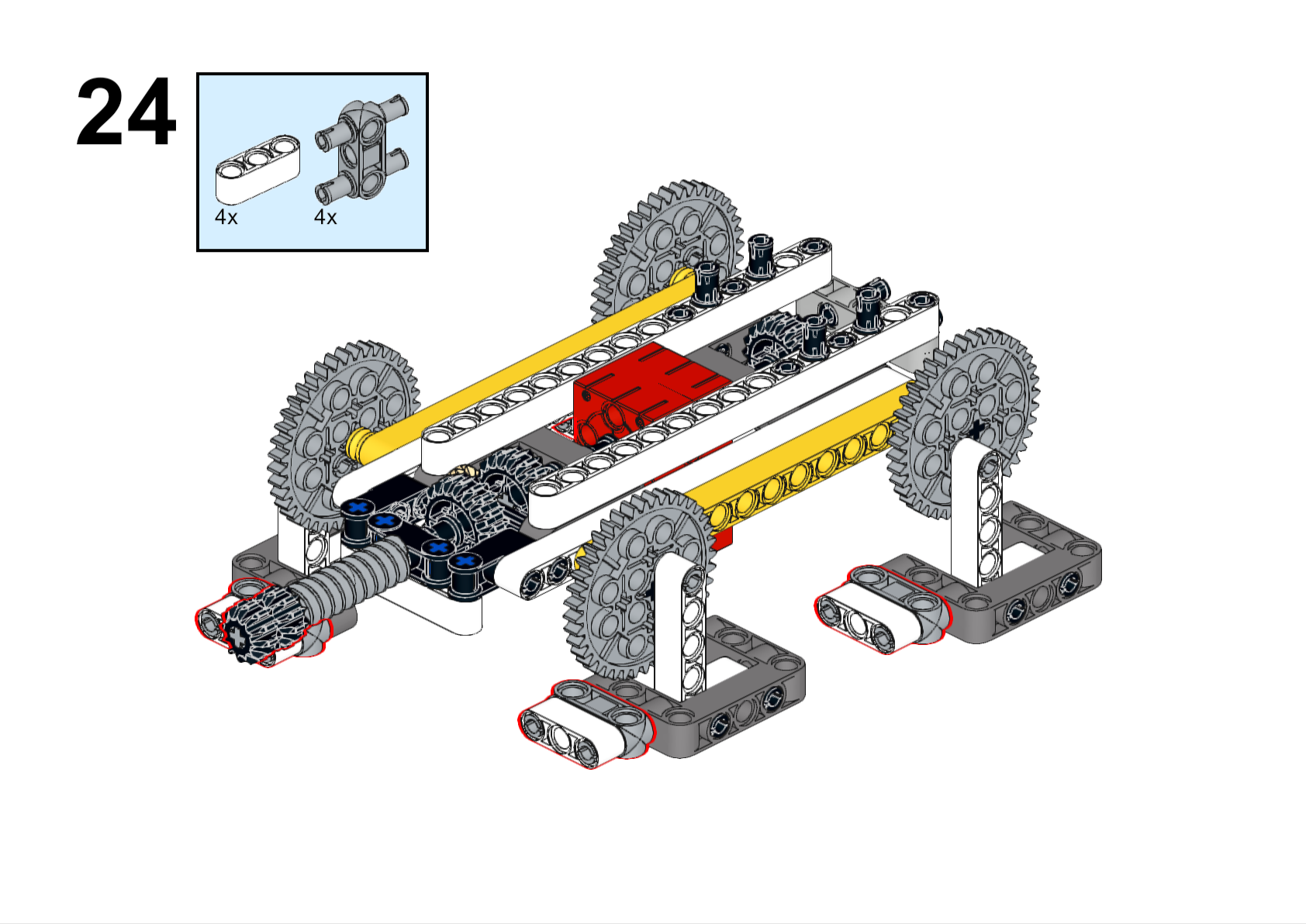
Assembly Steps






















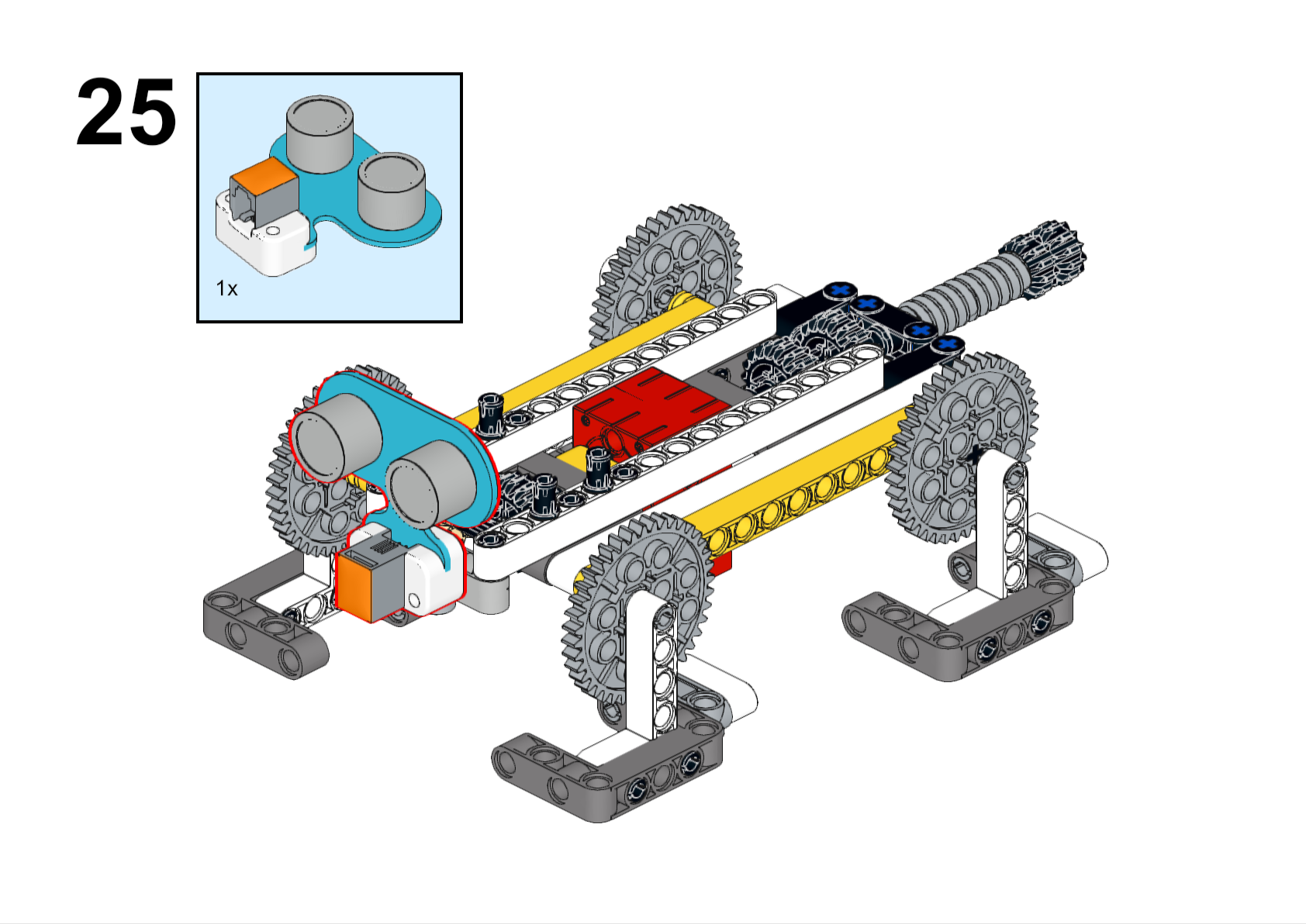

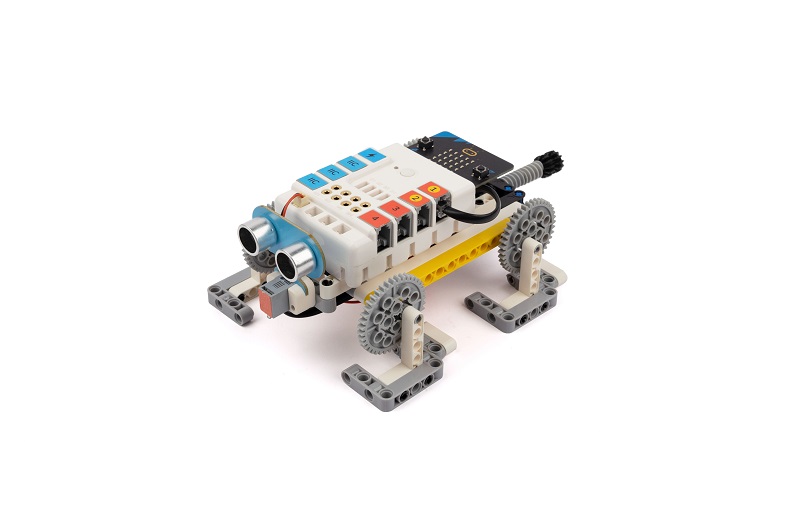
Completed
Hardware Connections
Connect the sonar:bit to J1 port and the motor to M1 port on Nezha expansion board.

Programming
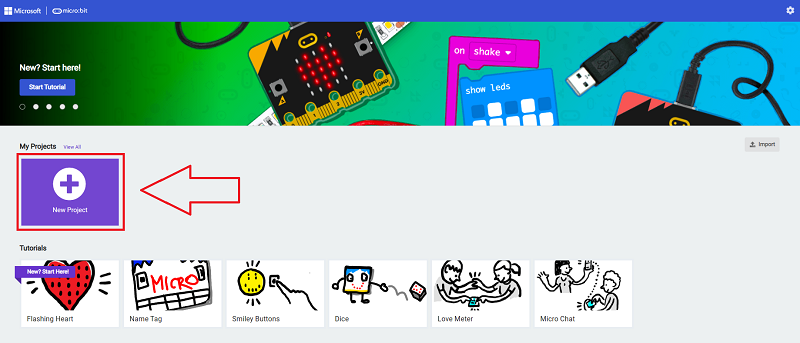
Go to makecode
Create new projects
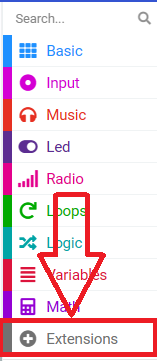
Click extensions
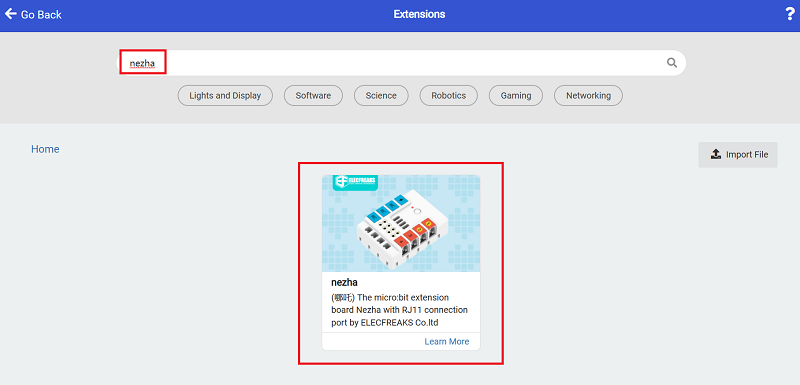
Search wih PlanetX to add the package.
Code

Link: https://makecode.microbit.org/_YLpbA6EebiM9
You can download it directly:
Demonstration
Present in groups and compare the results and effectiveness of each group.
Result
The mechanical dog walks forward and stops automatically when it encounters an obstacle.

Relection
Share in groups so that students in each group can share their production process and insights, summarise the problems and solutions they encountered, and evaluate their strengths and weaknesses.