机械臂与蜂鸣器编程
简介
XGO-lite V2内置了3自由度机械臂和扬声器。本教程将讲解 XGO-lite V2 的机械臂和扬声器编程方式。通过编程控制机械臂的运动和扬声器的音频输出,我们可以实现各种有趣和实用的应用场景。机械臂和扬声器编程是一个非常有挑战性和创新性的领域,需要涉及到机械臂控制、运动规划、音频处理等多个方面的知识。在接下来的讲解中,我们将会介绍机械臂和扬声器编程的基本概念和常见应用,希望这些内容可以为大家带来启发和灵感,激发大家对机器人编程热情。
材料准备
1 × micro:bit XGO Robot Kit V2
开始编程
本教程将通过图形化编程平台:MakeCode 对两款设备进行编程。请打开makecode平台官网链接:MakeCode. 并按下面操作方式进行编程环境准备。
编程环境准备
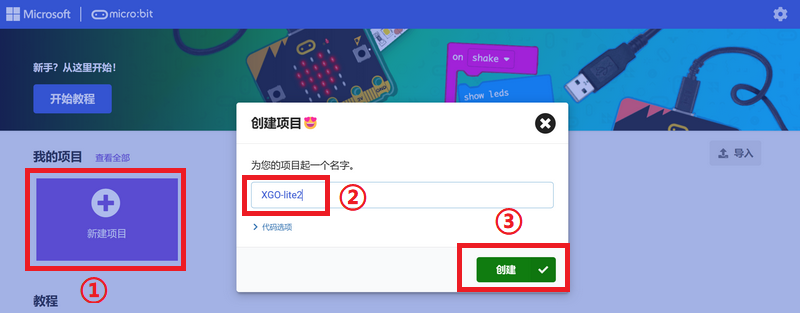
- 点击新建项目,给项目命名并创建
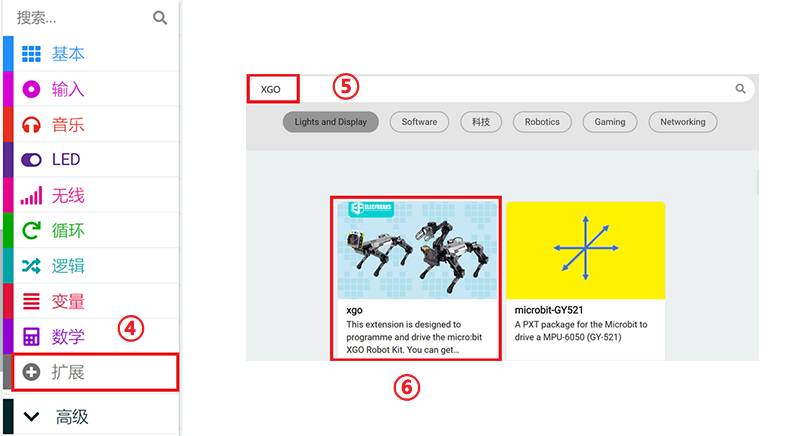
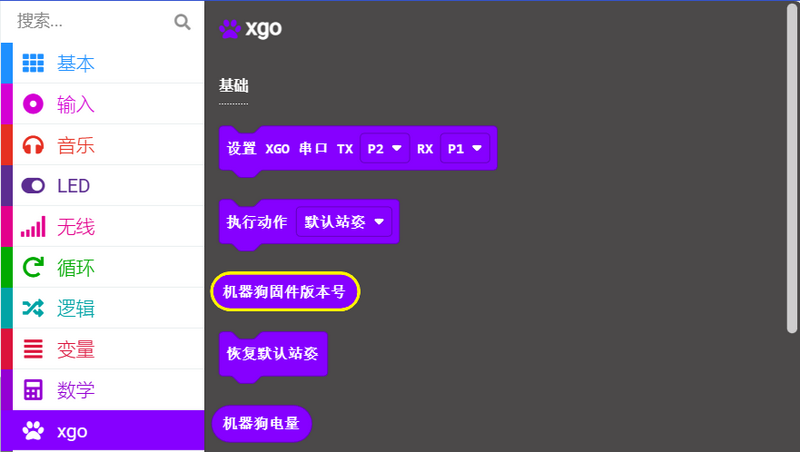
- 点击扩展并在搜索栏搜索XGO,选择XGO库,即可将XGO库加载到makecode平台编程环境
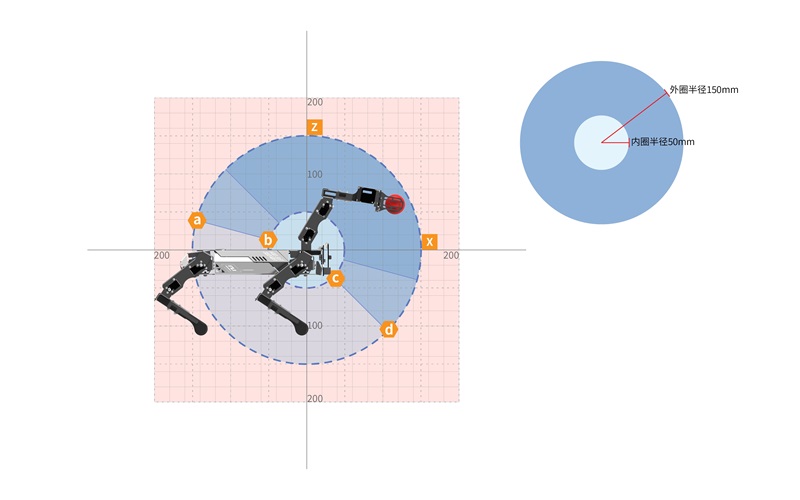
机械臂运动范围
机械臂的末端夹爪是在以X轴为横坐标,以Z轴为纵坐标的平面内运动,而且运动轨迹是由坐标(X,Z)确定。下图是机械臂夹爪运动范围和坐标示意图,只有坐标(X,Z)在蓝色区域内,机械臂才可运动到坐标位置,超出这个范围,机械臂不会运动。
编程示例
