常见问题解决办法
机器狗走不直
机器狗是通过陀螺仪纠偏的,开机的时候需要将机器狗放在地面或者桌子上,按下开关后陀螺仪会有3-5s的初始化过程,在此其间切勿移动机器狗,待开关灯常亮后再操作。
如果排除陀螺仪初始化的问题后机器狗行走依然偏差很大,则需要对机器狗重新标定。
重新标定机器狗
当您发现您的机器狗姿态不正常时,如站立姿态时,某条腿严重偏离导致四条腿无法同时着地或者明显身体歪斜,很有可能是由于螺丝松动或舵机滑齿导致初始位置偏离预设值,此时您可以进行初始位置标定,以重新校准机器狗初始位置预设值。
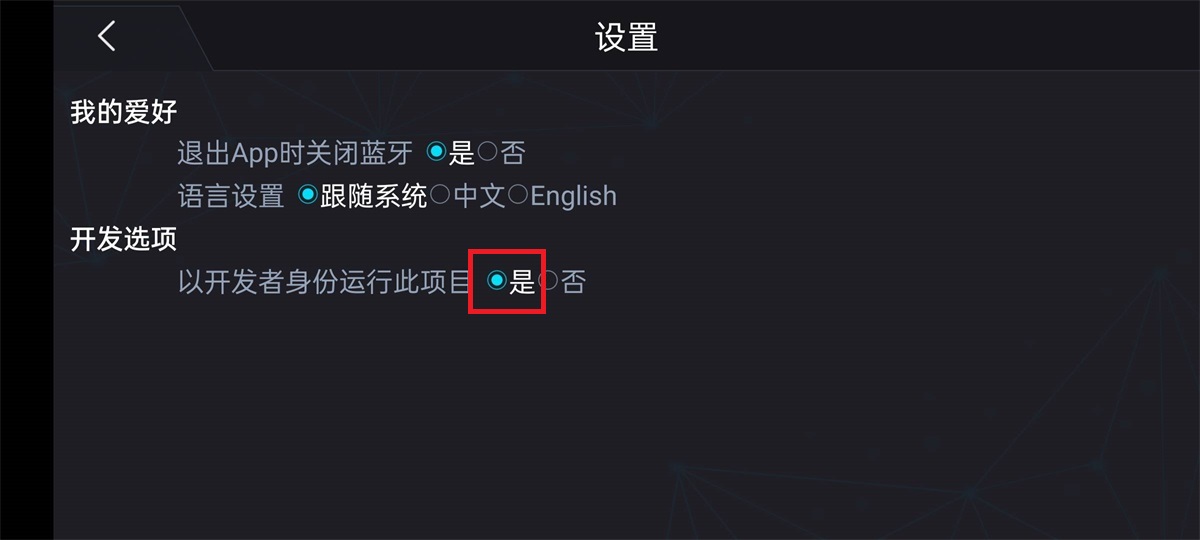
- 打开XGO APP,通过蓝牙连接上机器人后,点击设置按钮按钮,以开发者身份运行,如下图所示。
- 返回主页面,点击标定图标。

- 进入标定页面,点击开始标定。

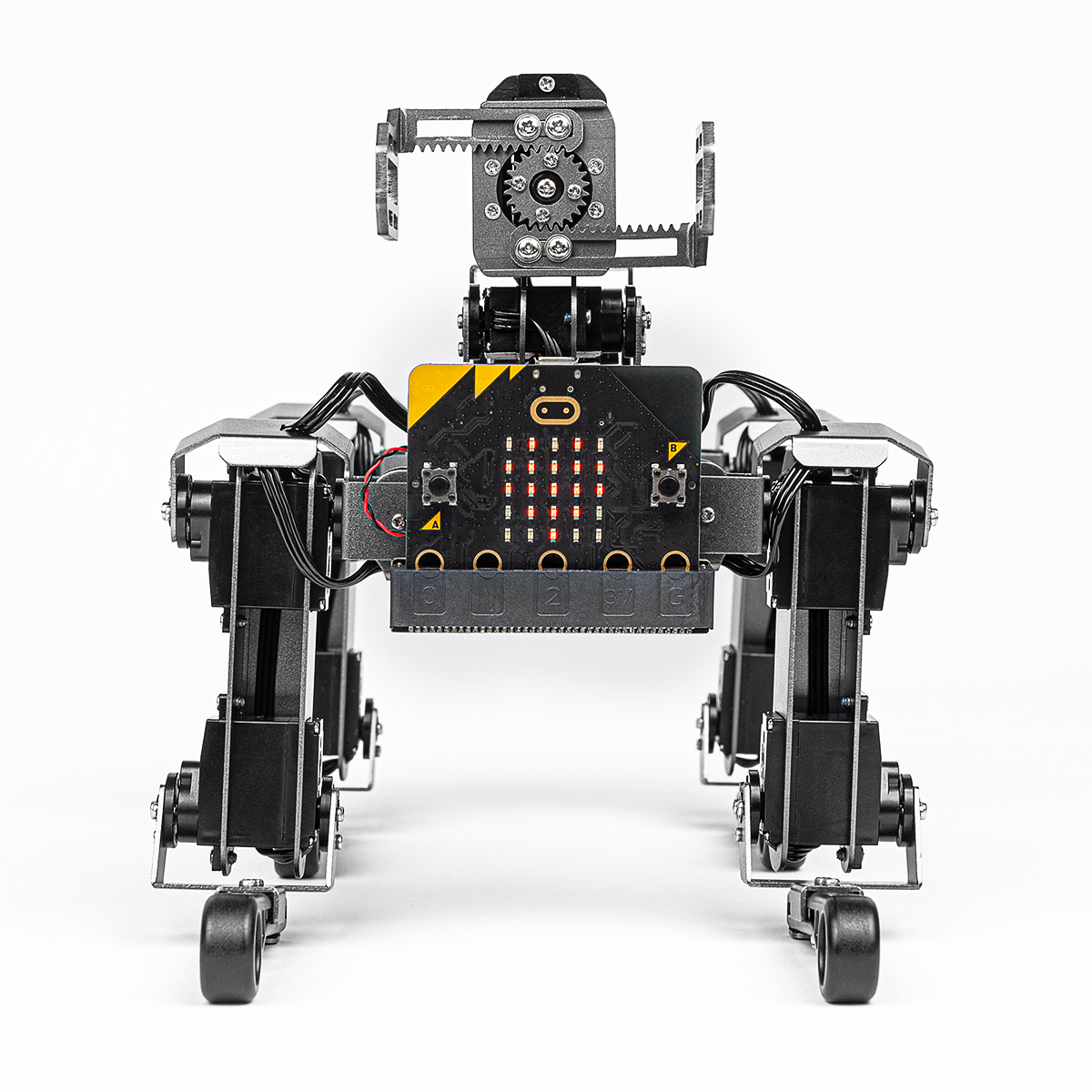
- 此时机器狗的舵机将不再输出力矩,允许您转动所有关节。将机器狗按照下图姿势摆放,注意,使每条腿肩部垂直于身体,大腿垂直于地面,小腿垂直于大腿,将夹爪打开至最大量程,机械臂折叠放在背上,摆放是否垂直将直接影响机器狗工作时的姿态。

- 摆放标准后,在标定界面中点击“完成标定”按钮,10秒后机器狗将恢复初始站立姿势。


更换舵机
以更换膝关节舵机为例,图示更换舵机。注意:机器狗舵机共有15个不同的ID,必须使用相同ID替换。
舵机更换视频教程链接:https://www.elecfreaks.com/download/xgo/XGO-LITE2_servo_replacement.mp4
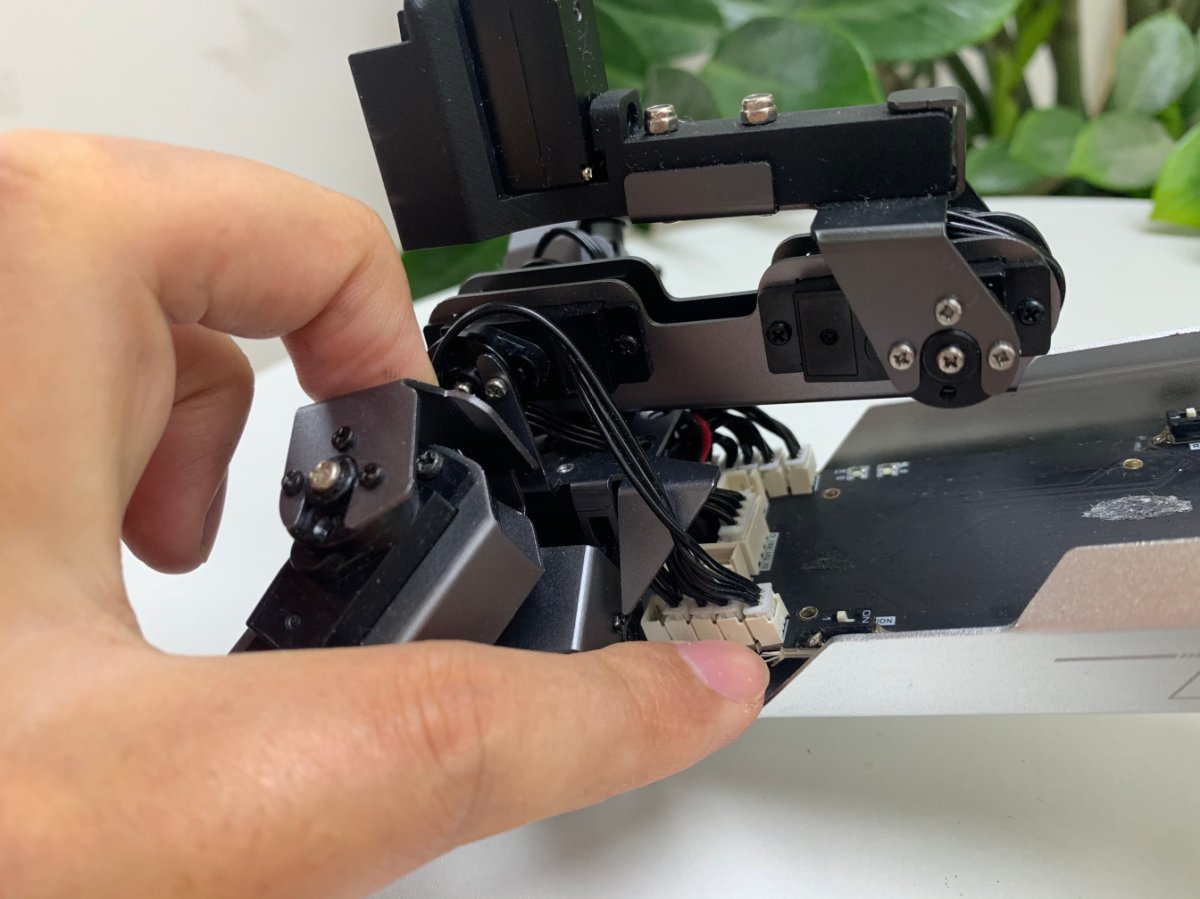
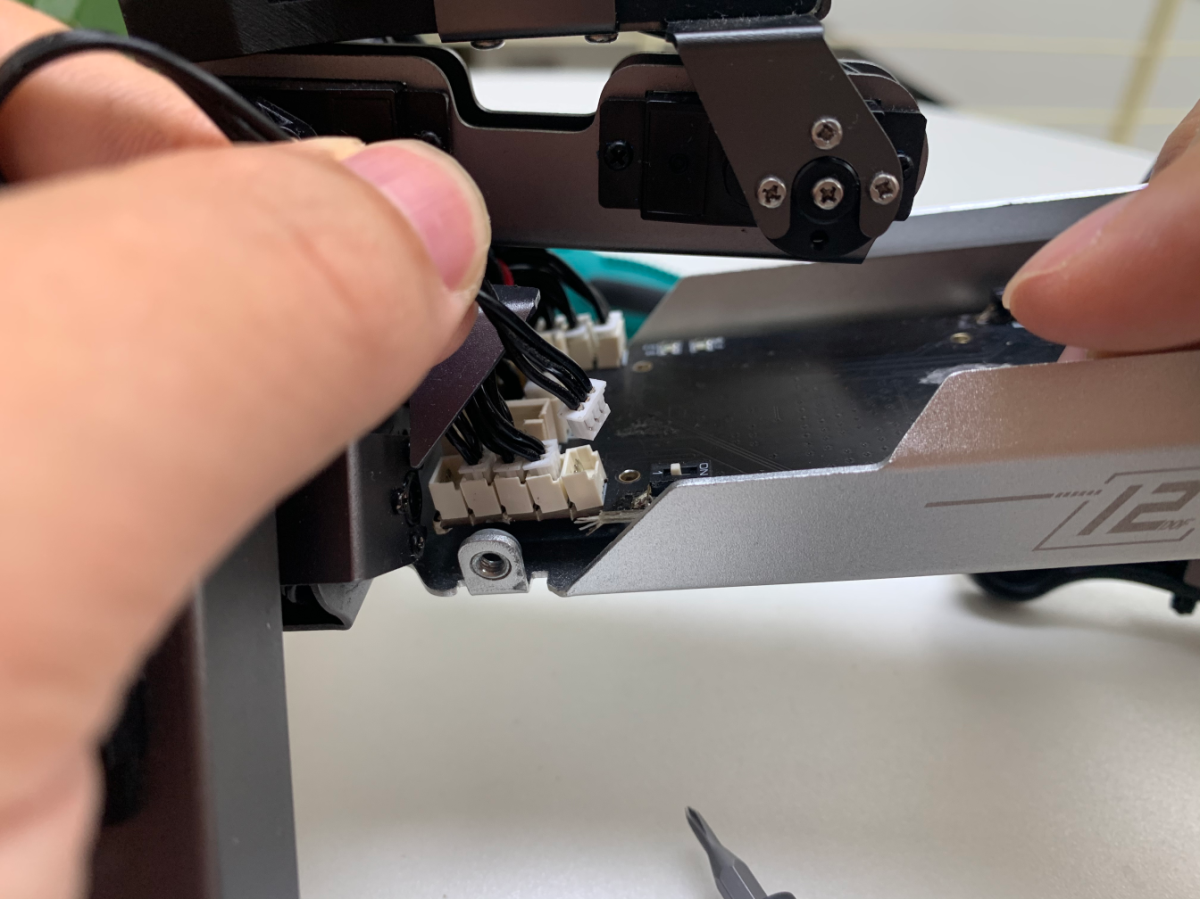
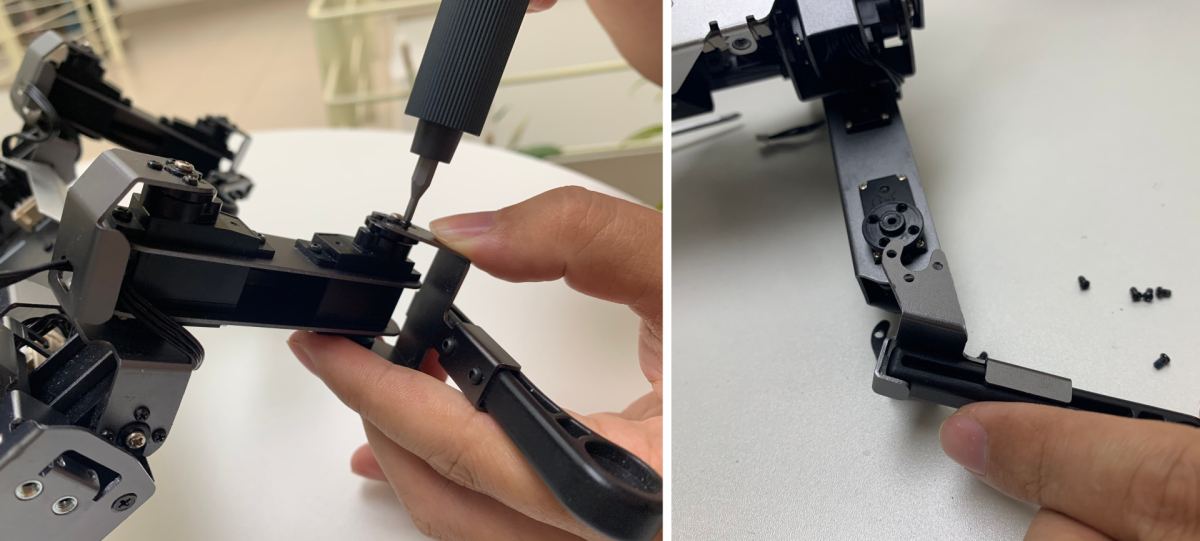
步骤一,打开机器狗后盖,从驱动板上拔掉损坏的膝关节舵机线。
步骤二,拆掉膝关节舵机主副舵盘的舵盘螺丝,把小腿取下来。
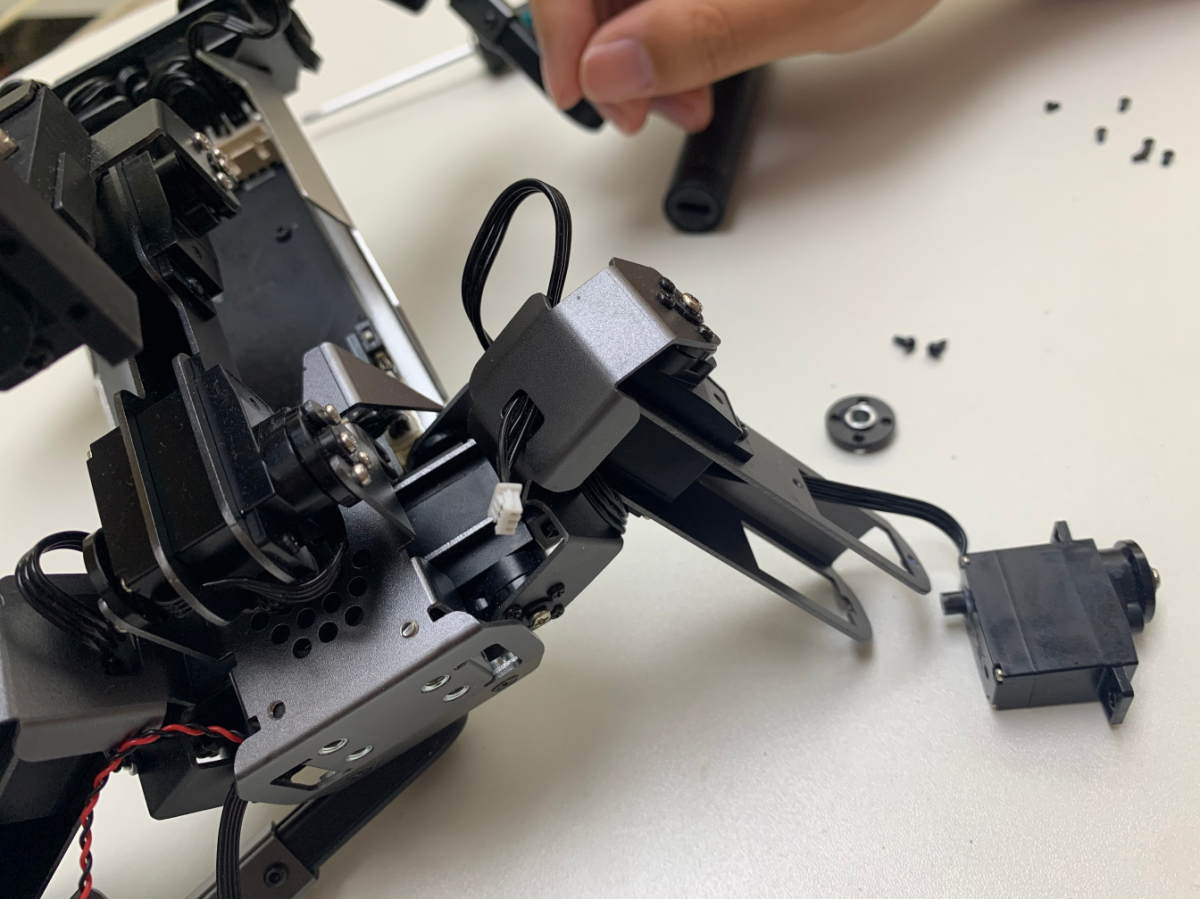
步骤三,取下损坏的舵机,注意不要使劲拉扯舵机线。

步骤四,把膝关节舵机线穿过对应的位置,并把舵机固定在大腿钣金上。
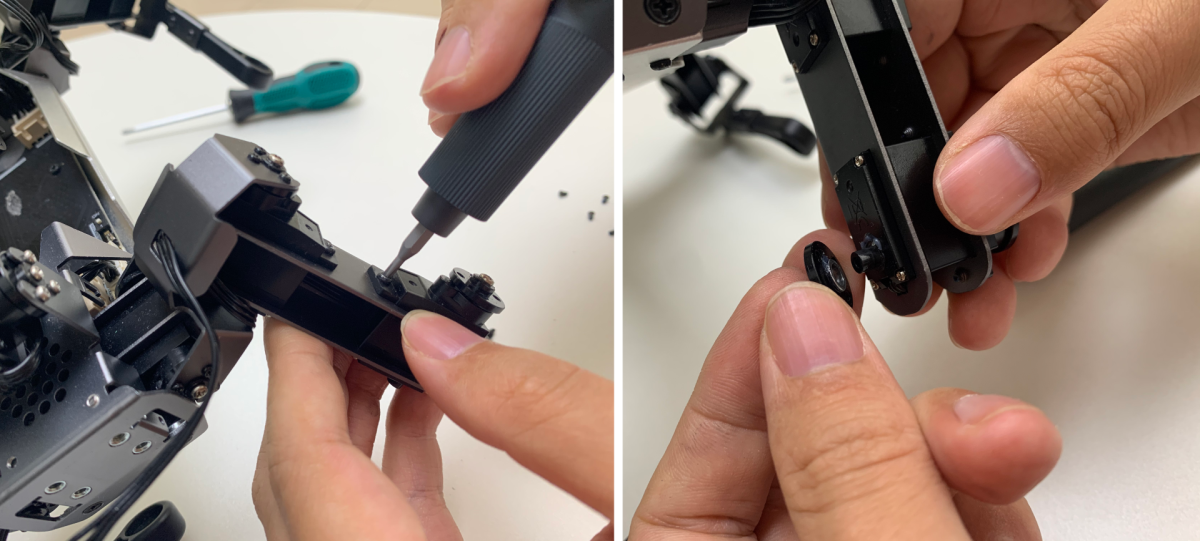
步骤五,把小腿固定在主副舵盘上,注意小腿和大腿需要形成90°直角。

步骤六,把线插在主板上,关闭机器狗上盖,开机并重新标定机器狗。