Software Library Documentation
The micro:bit XGO-Rider uses the micro:bit as the main control board, and its programming platform uses the makecode platform. To facilitate users to program and use the micro:bit XGO-Rider, ELECFREAKS team has developed an independent programming library file specifically for the micro:bit XGO-Rider. The following will introduce the function and parameter range of each programming command in detail:
| Function | Order | Parameter | Detailed explanation |
|---|---|---|---|
| Basic Control | 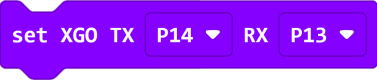 | Parameter 1 type: drop-down options Parameter 1 range: default P14 Parameter 2 type: drop-down options Parameter 2 range: default P13 | Set the communication serial port between micro:bit and XGO-Rider, the default is TX: P14, RX: P13. |
 | Parameter 1 type: drop-down options Parameter 1 range: normal mode, cyclical pattern1, cyclical pattern2. | Set the performance mode of XGO-Rider. XGO-Rider will perform a set of actions. | |
 | Parameter 1 type: drop-down options Parameter 1 range: playPendulum,AdvanceAndRetreat, upsAndDowns,TetragonalSnake, LiftRotation,CircularSloshing | Set XGO-Rider to perform standard actions. | |
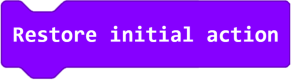 | No | Set XGO-Rider back to its initial state. | |
 | Return value: number Return value range: 0~100 | Get the current charge level of XGO-Rider. | |
 | Return value: string | Get the current firmware version number of XGO-Rider. | |
 | Parameter 1 type: drop-down options Parameter 1 range: all, 1, 2, 3, 4 Parameter 2 type: drop-down options Parameter 2 range: 16 common colors | Set the color of XGO-Rider's lamp. | |
 | Parameter type: string Parameter range: a~z,A~Z,_<br / | Set the Bluetooth name of XGO-Rider. | |
 | Parameter 1 type: number Parameter 1 range: 0~255 Parameter 2 type: number Parameter 2 range: 0~255 Parameter 3 type: number Parameter 3 range: 0~255 | Set the color of the rainbow light ring on the XGO-Rider driver board. | |
| Steering gear control |  | Parameter Type: Drop-down options Parameter Range: On/Off | Set whether the dynamic balance state of the XGO-Rider is turned on. If the dynamic balance state is turned on, the XGO-Rider will adjust its posture in real time to maintain body balance. |
 | Parameter Type: Drop-down options Parameter Range: Enter/Complete | Set XGO-Rider to enter calibration mode and complete calibration. Calibration means resetting the initial angle of the XGO-Rider's servo. After entering the calibration state, the user can adjust the servo angle by himself. After completing the calibration, XGO-Rider will maintain the state of calibration in the default stance. | |
 | Parameter type: drop-down options Parameter range: roll/pitch/yaw | Get the angle data of the XGO-Rider body in the roll/pitch/yaw directions. | |
 | Parameter type: number Parameter range: -20~20 | Set the height of the XGO-Rider body for rising and falling adjustments. | |
 | Parameter 1 type: number Parameter 1 range: -100~100 | Set the left and right tilt angle of the XGO-Rider body. | |
| Motion Control |  | Parameter 1 type: drop-down option Parameter 1 range: forward/backward Parameter 2 type: number Parameter 2 range: 0~100 Parameter 3 type: number Parameter 3 range: 0~ | Set XGO-Rider to run forward or reverse at a set speed for a set time. |
 | Parameter 1 type: drop-down option Parameter 1 range: clockwise/counterclockwise Parameter 2 type: number Parameter 2 range: 0~100 Parameter 3 type: number Parameter 3 range: 0~ | Set the XGO-Rider to run clockwise or counterclockwise at a set speed for a set time. | |
 | Parameter 1 type: number Parameter 1 range: 2~4 | Set up the XGO-Rider to squat and raise/lower in a set timed cycle. | |
 | Parameter 1 type: number Parameter 1 range: 2~4 | Set the XGO-Rider to rock left and right at a set time period. |