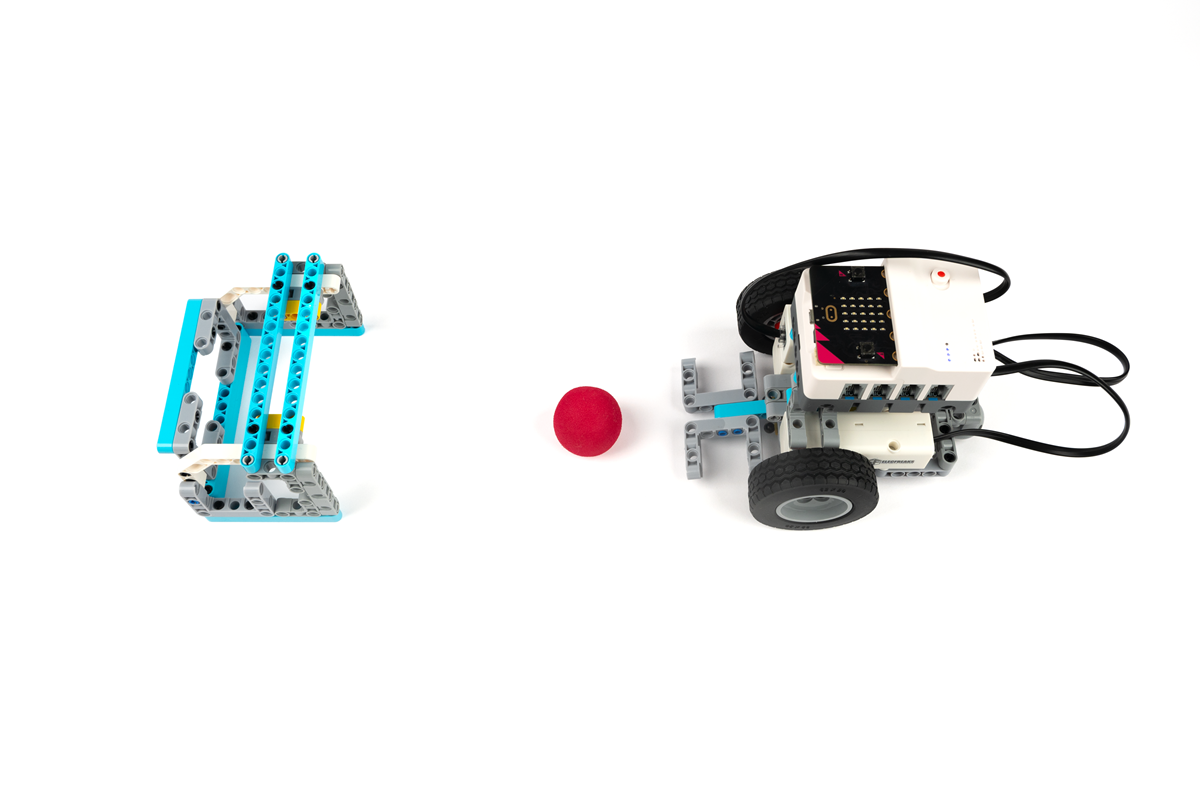
Micro:bit Related ProductsBuilding BlocksNezha Pro Sport Kit(EF08428)案例八:射门机器人On this page案例八:射门机器人案例简介设计一款射门机器人。教学准备名称图示哪吒Pro运动套装教学目标了解makecode的基本使用程序下载方式课程引入欢迎小朋友们加入我们的STEAM奇妙旅程!今天,我们将一起探索如何制作一个射门机器人。在这个项目中,我们将学习到如何通过简单的机械传动来控制机器人的运动。不需要复杂的编程知识,只需动手组装和调整,你就能创造出一个射门机器人。让我们一起开启这段激动人心的STEAM学习之旅,激发你的创造力和解决问题的能力!学习探究micro:bit程序下载方式搭建步骤射门机器人搭建球门搭建硬件连线将三个智能电机分别连接到哪吒Pro扩展板的M1、M2、M3接口。硬件连线图代码编程进入“makecode.microbit.org”,点击新建项目。在弹出窗口输入项目名称并点击创建。点击代码抽屉中的扩展。在弹出界面输入nezha pro并点击搜索图标,在显示nezha pro软件库后点击。同样的方式加载PlanetX软件库。示例程序程序链接:https://makecode.microbit.org/_Jxyg1qifi1F3你也可以通过以下网页直接下载程序。下载程序使用 USB 线连接 PC 和 micro:bit V2。连接成功后,电脑上会识别出一个名为 MICROBIT 的盘符。点击左下角的,选择Connect Device。点击。点击。在弹出窗口选择 BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的 micro:bit 就已经连接成功。点击下载程序案例演示按下micro:bit上面的按键A即可让射门机器人向前移动一段距离,并踢出足球。总结分享扩展知识