Design a rope skipping robot to simulate rope skipping movements and understand the characteristics and construction methods of gear transmission.
Understand the characteristics and construction methods of gear transmission
Inspire interest in engineering and robotics.
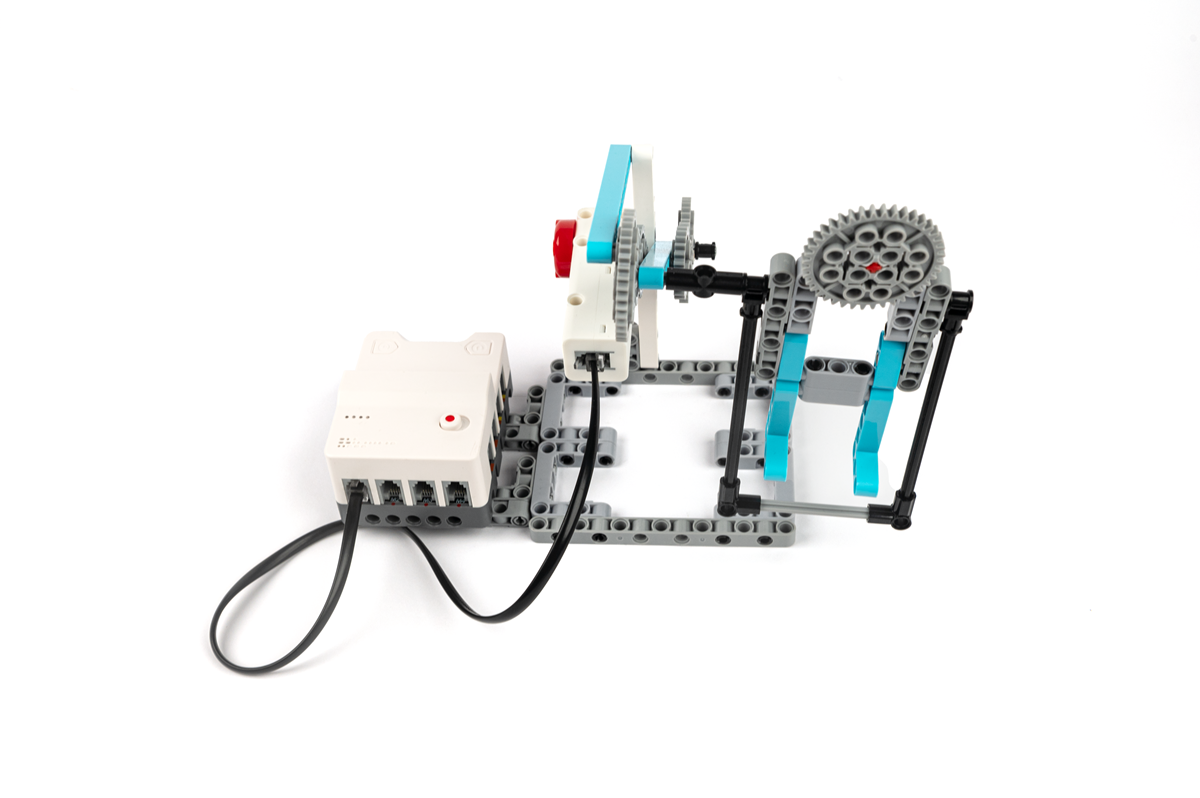
Welcome children to join our wonderful STEAM journey! Today, we will explore how to make a rope skipping robot without programming. The core of this project is to use the clever application of gear transmission structure. In this project, we will learn basic mechanical design principles and understand how to control the movement of the robot through simple mechanical transmission. You can create a rope skipping robot without complex programming knowledge, just assembly and adjustment. Let's start this exciting STEAM learning journey together to stimulate your creativity and problem-solving ability!
What are the characteristics of gear transmission?
How to build a gear transmission.