Case 12: Obstacles Avoidance Car
Introduction
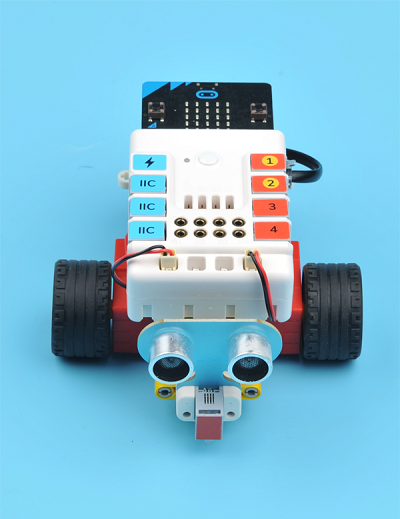
This is an obstacle avoidance car. It detects whether there are obstacles in front of it through the ultrasonic sensor on the front of the car, the car automatically turns when it detects obstacles to avoid collisions.
Quick Start
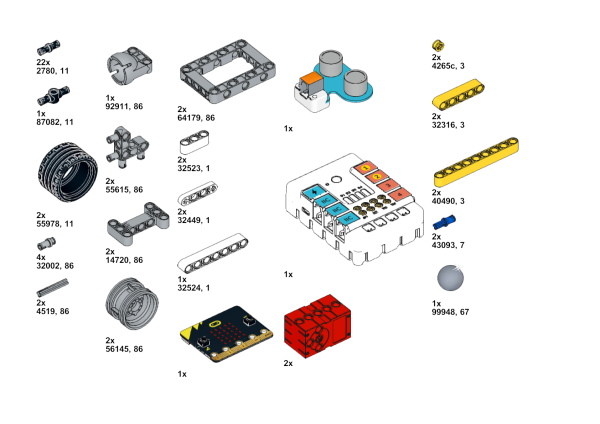
Materials Required
Nezha expansion board × 1
micro:bit × 1
Sonar:bit × 1
Motors × 2
RJ11 wires × 1
Tips: You may need to purchase Nezha Inventor's Kit if you want all the above compoents.
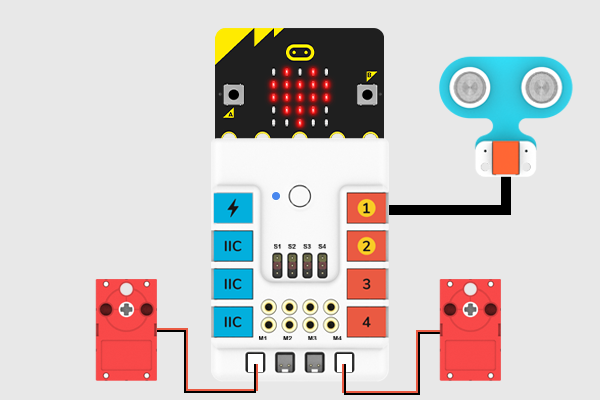
Connection Diagram
Connect the sonar:bit to J1, the two motors to M1&M4 on the Nezha expansion board as the picture shows.
Assembly Video
Video reference: https://youtu.be/k8eaTQSVsfk
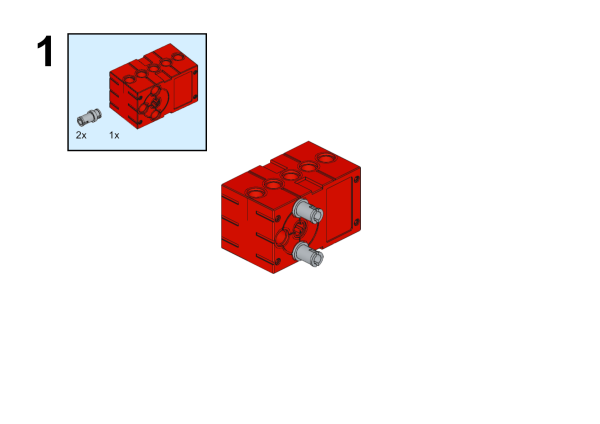
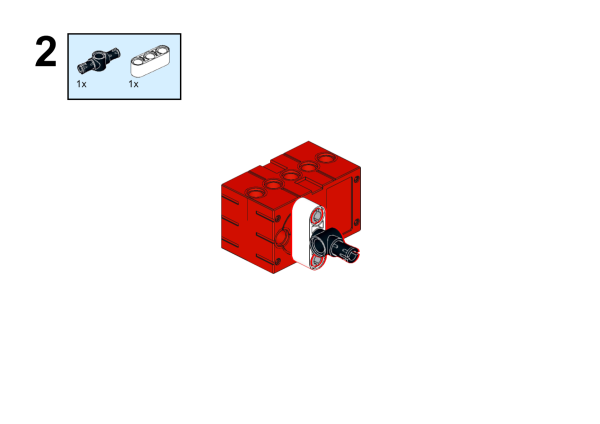
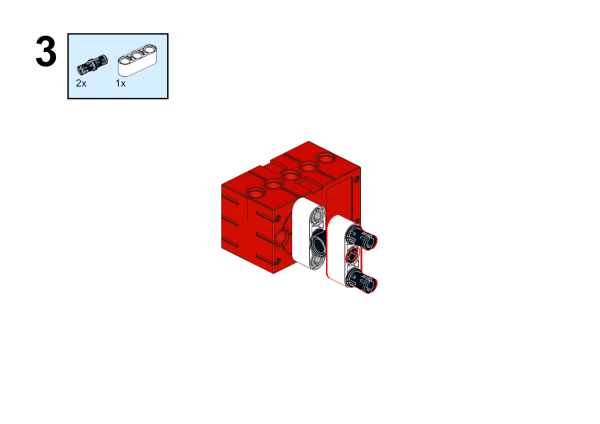
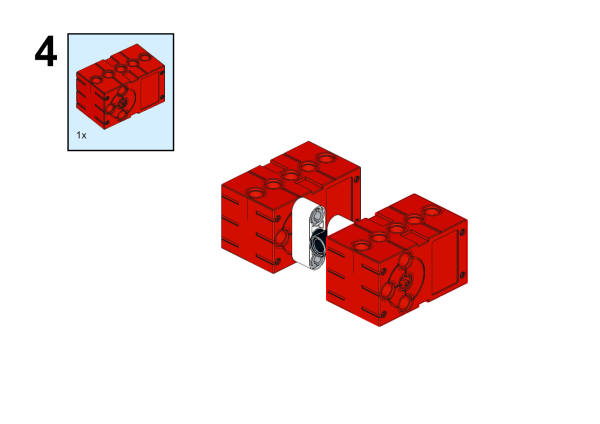
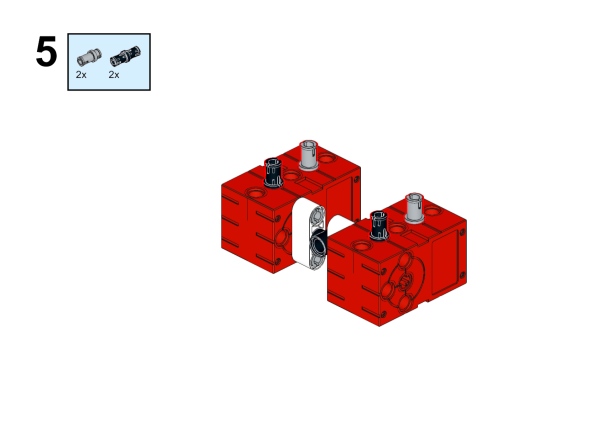
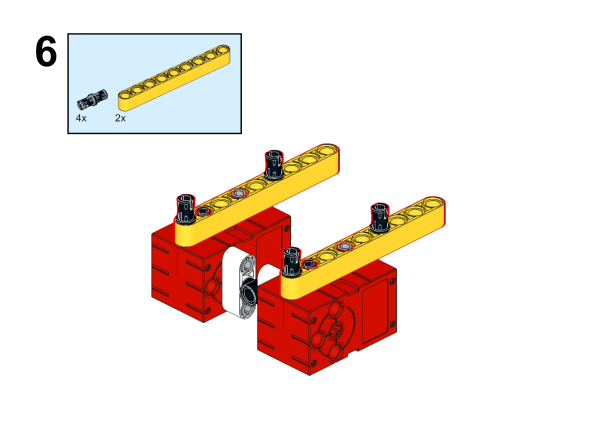
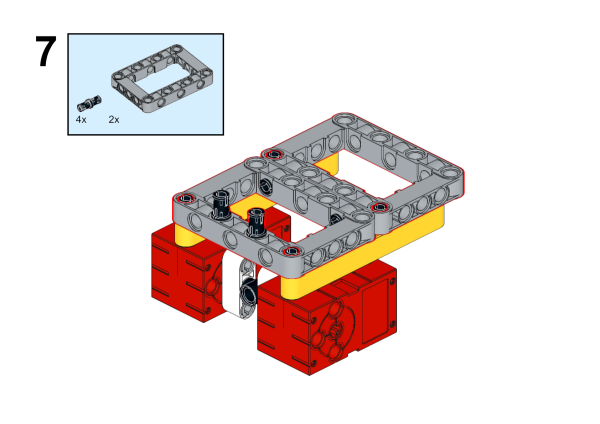
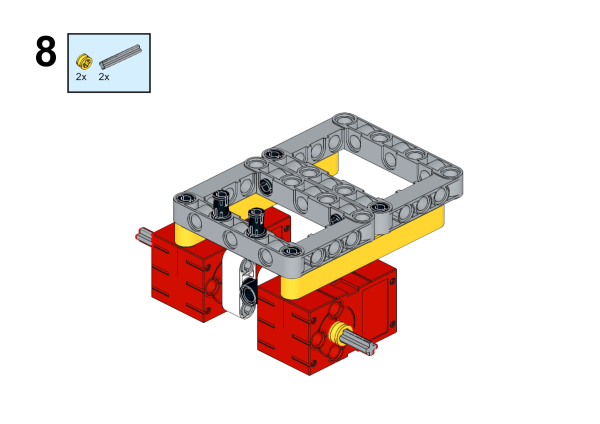
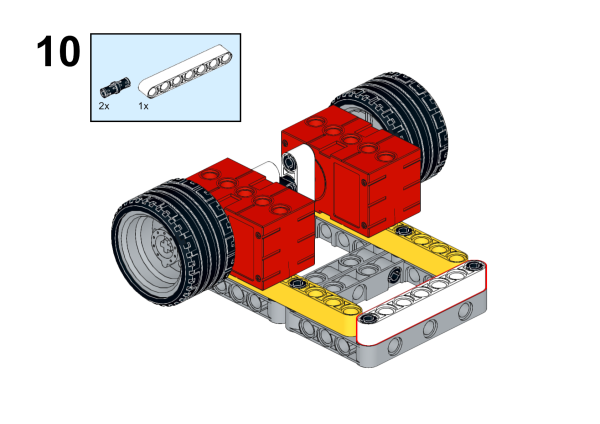
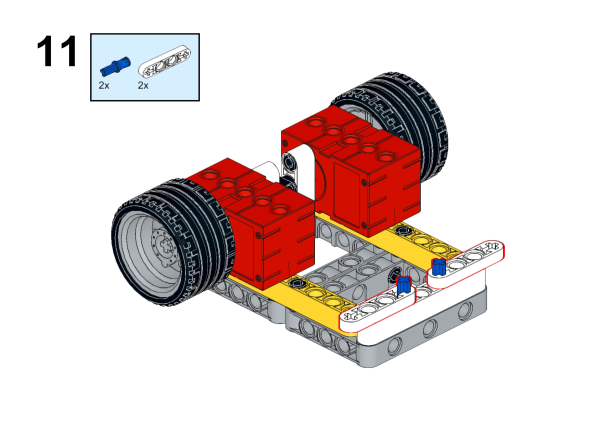
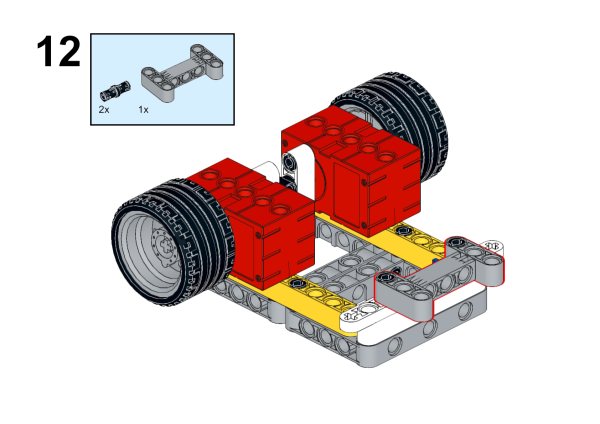
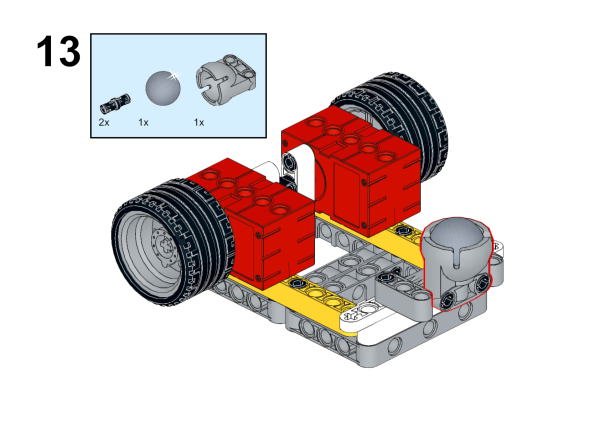
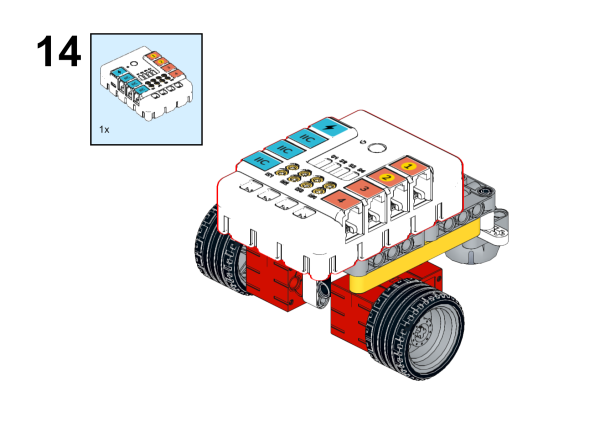
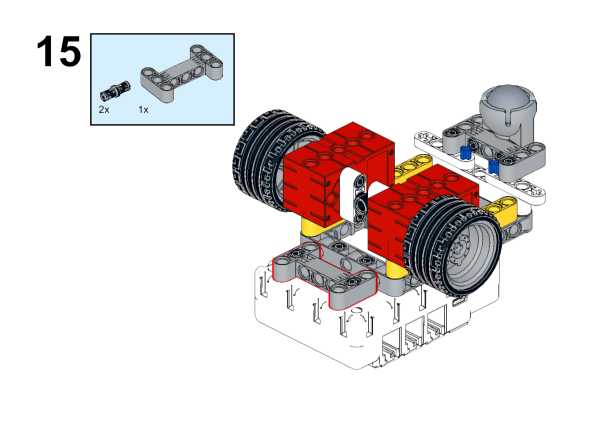
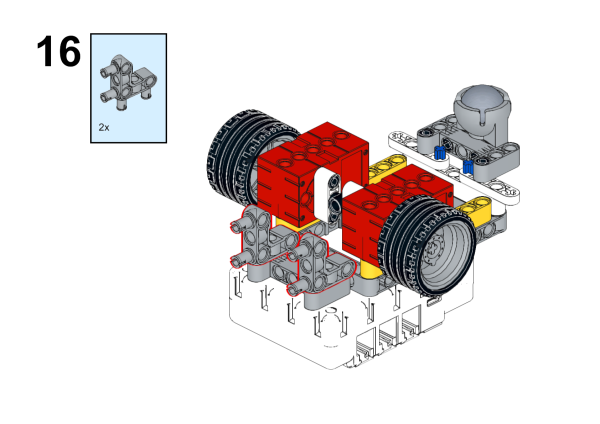
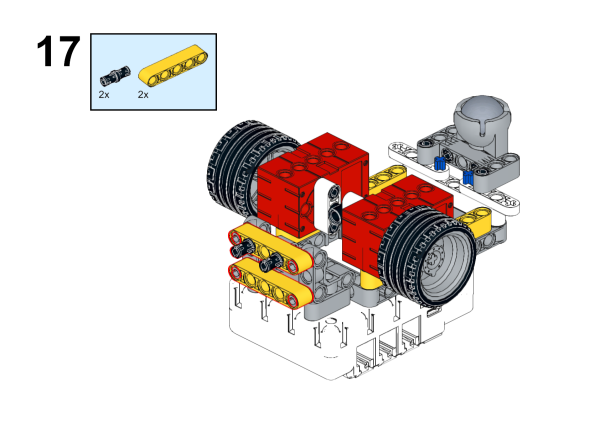
Assembly Steps

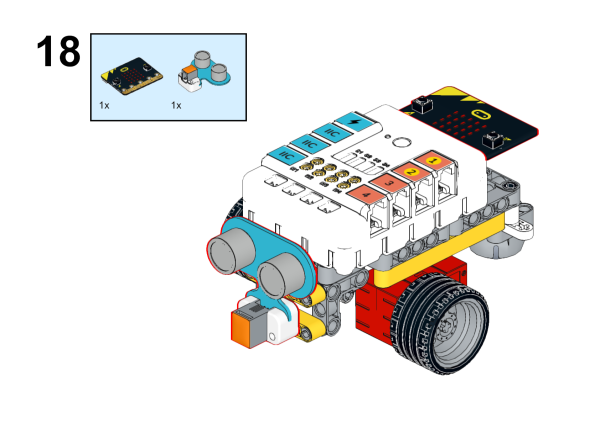
MakeCode Programming
Step 1
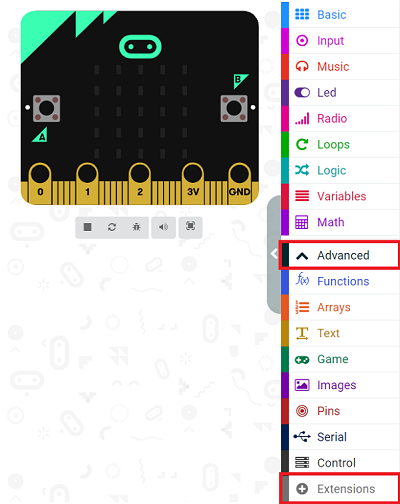
Click "Advanced" in the MakeCode to see more choices.
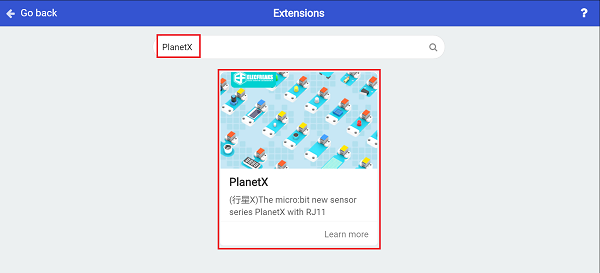
For programming, we need to add a package: click "Extensions" at the bottom of the MakeCode drawer and search with "PlanetX" in the dialogue box to download it.
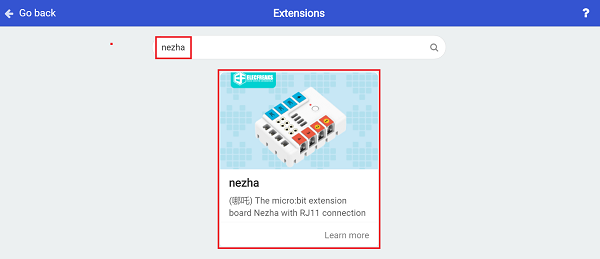
For programming, we need to add a package: click "Extensions" at the bottom of the MakeCode drawer and search with "nezha" in the dialogue box to download it.
Notice: If you met a tip indicating that some codebases would be deleted due to incompatibility, you may continue as the tips say or create a new project in the menu.
Step 2
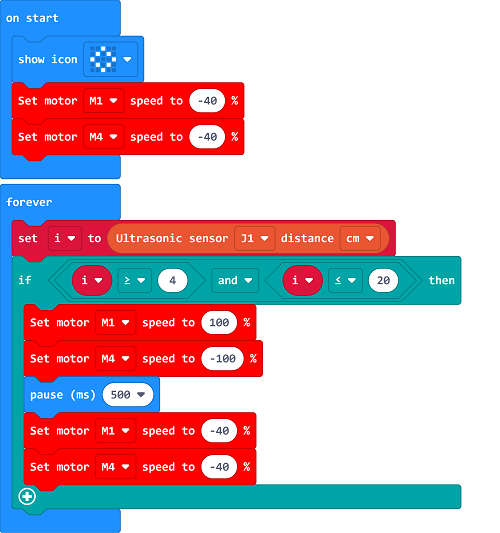
Code as below:
Reference
Link:https://makecode.microbit.org/_MyUJpP6L9YPo
You may also download it directly below:
Result
The car drives and avoids the obstacles automatically.