Case 01:The Mechanical Shrimp
Introduction
Build a mechanical shrimp with the Nezha Inventor's Kit.

Quick to Start
Materials Required
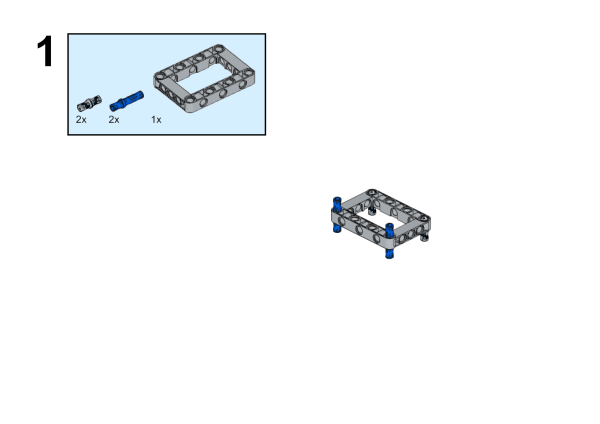
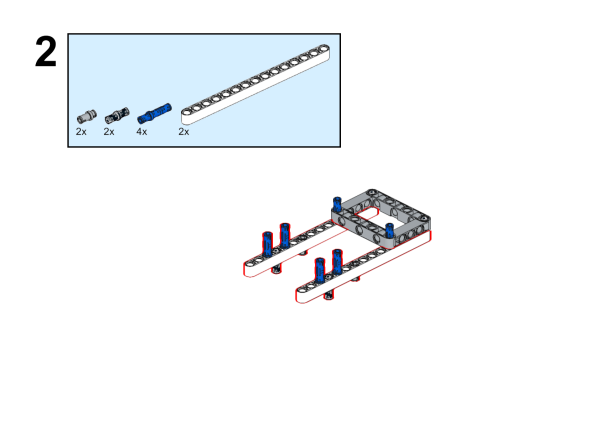
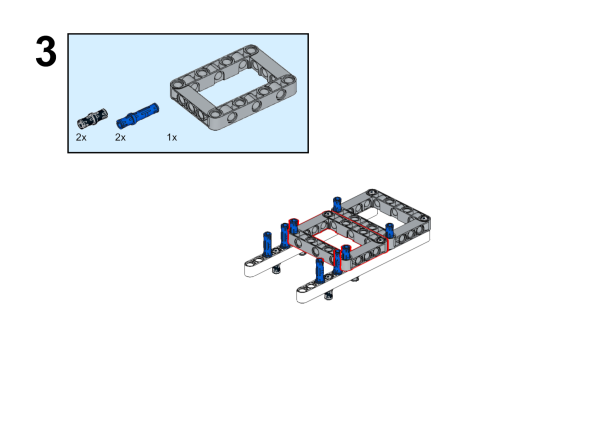
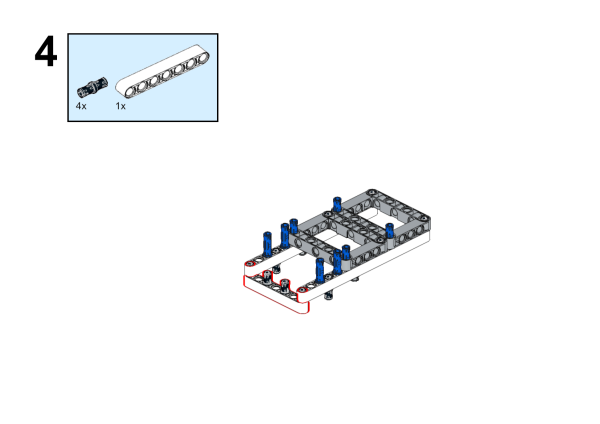
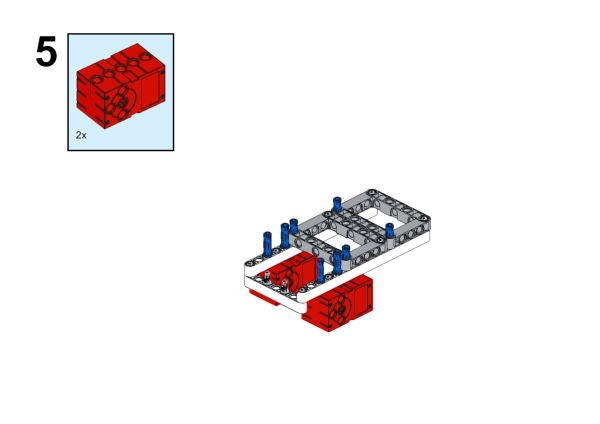
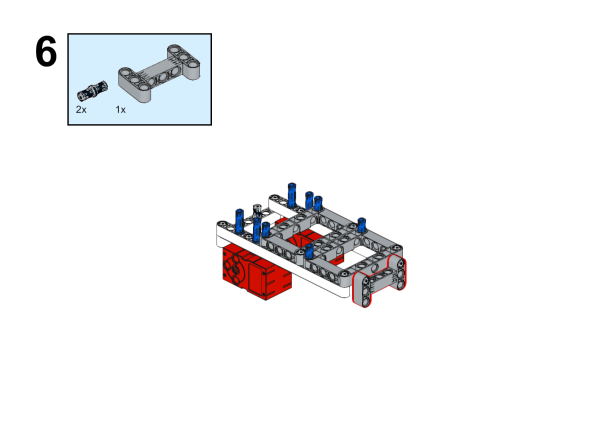
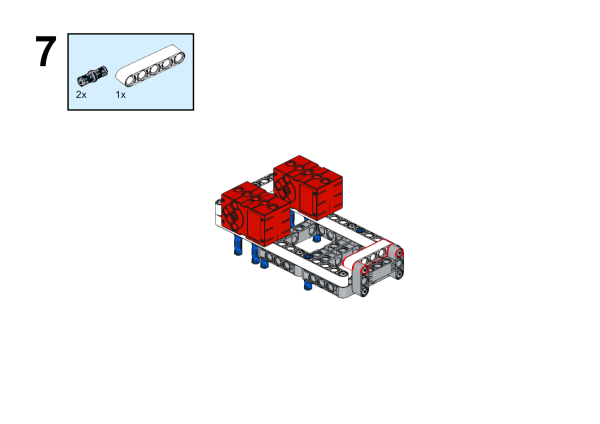
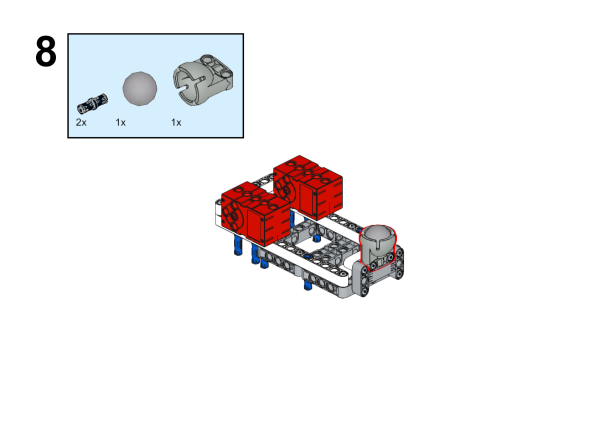
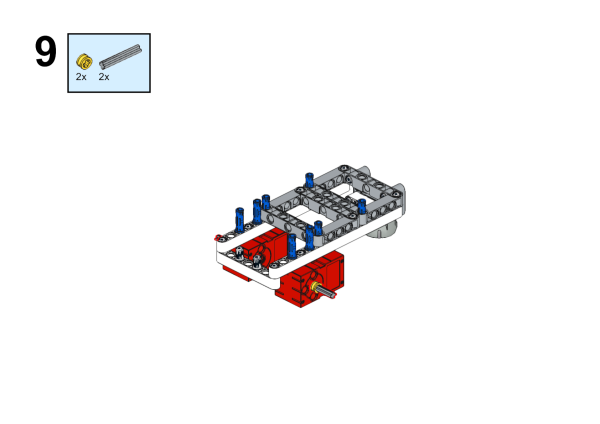
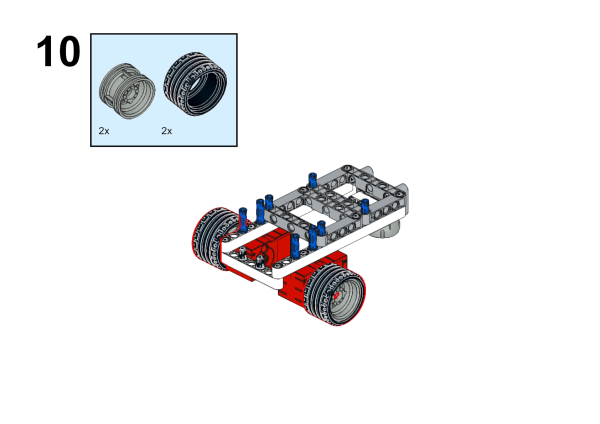
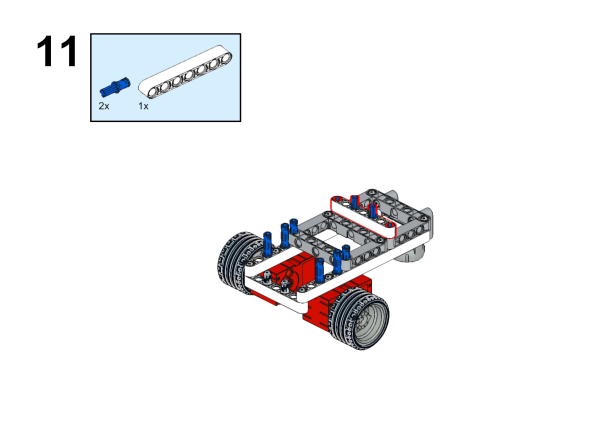
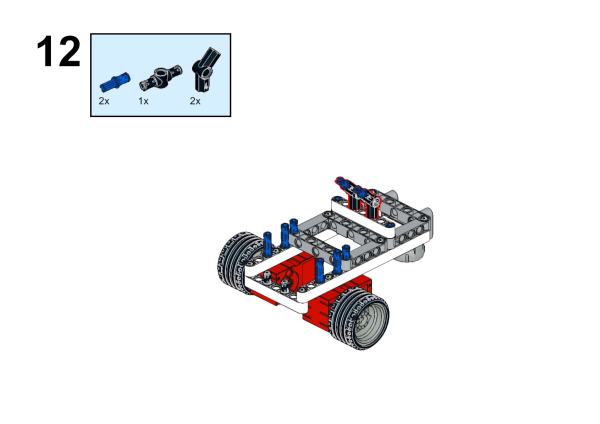
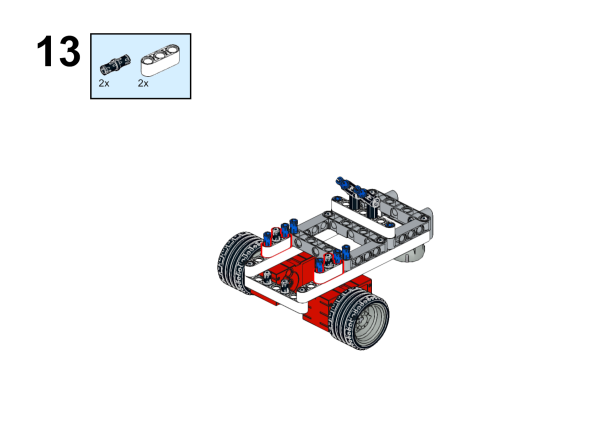
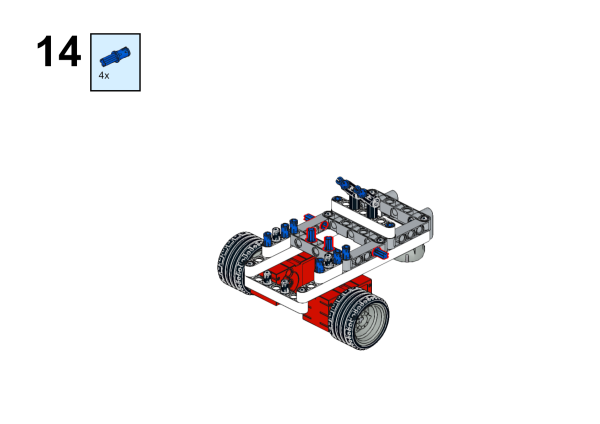
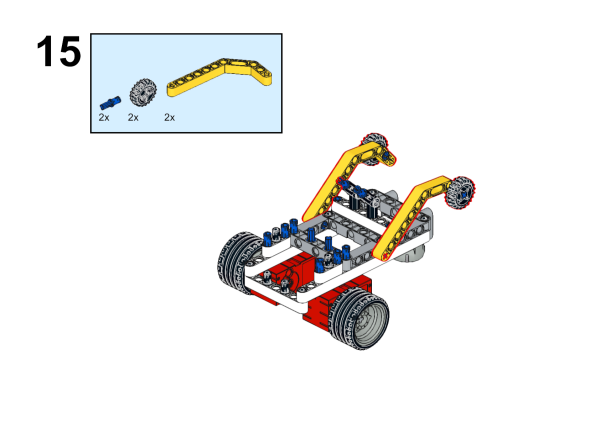
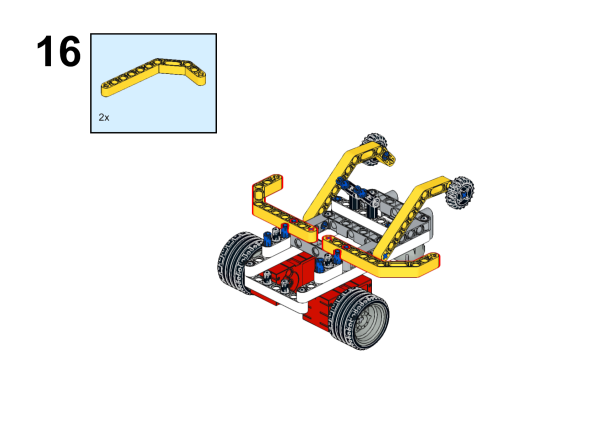
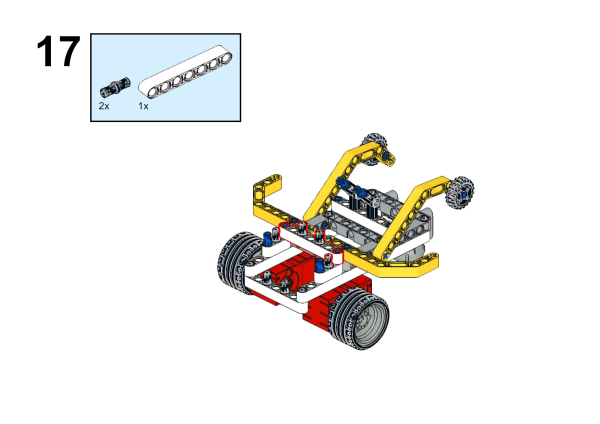
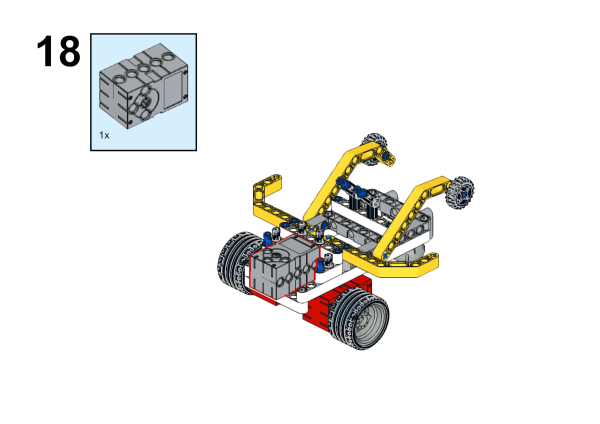
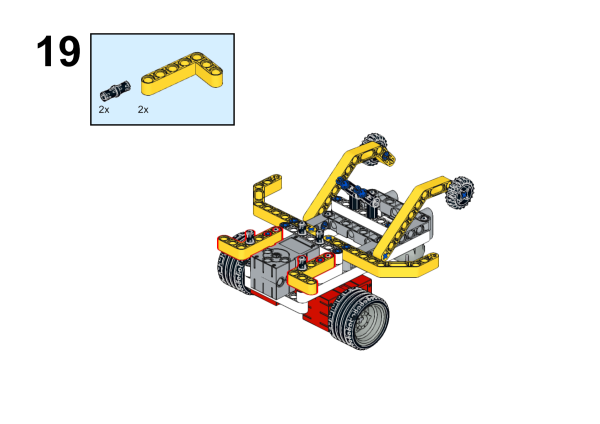
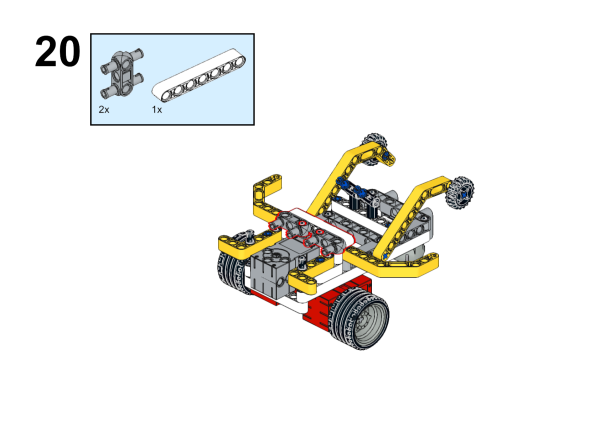
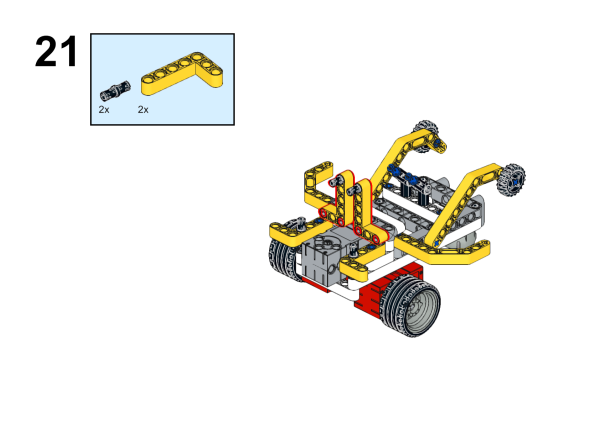
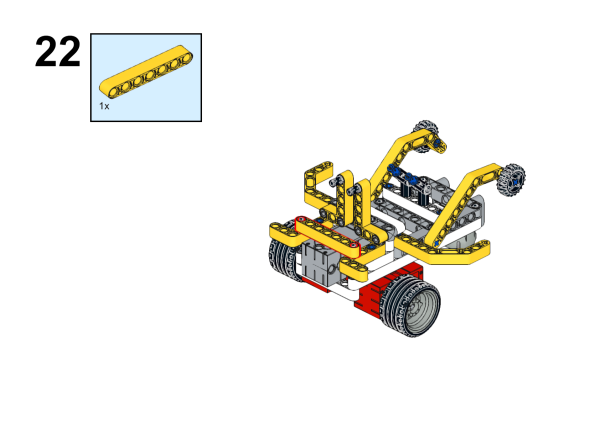
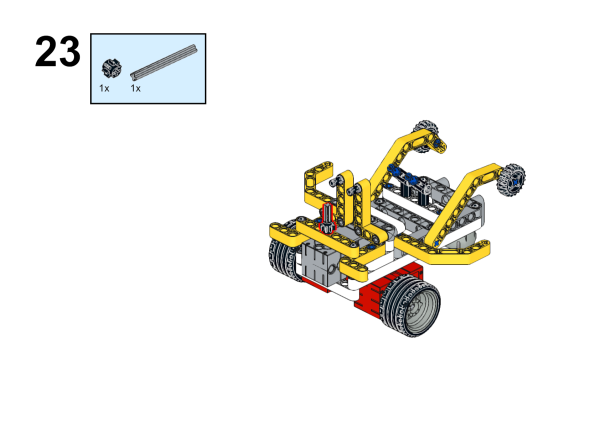
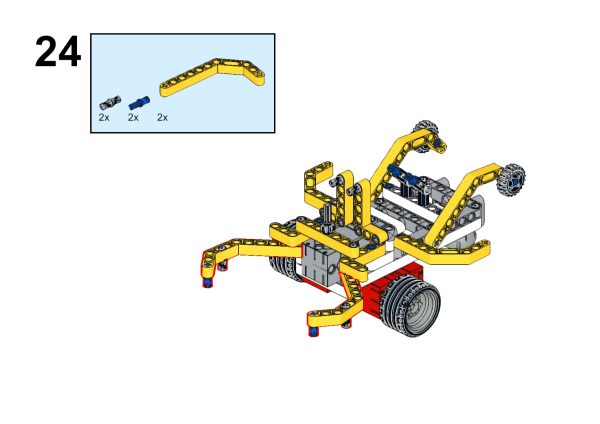
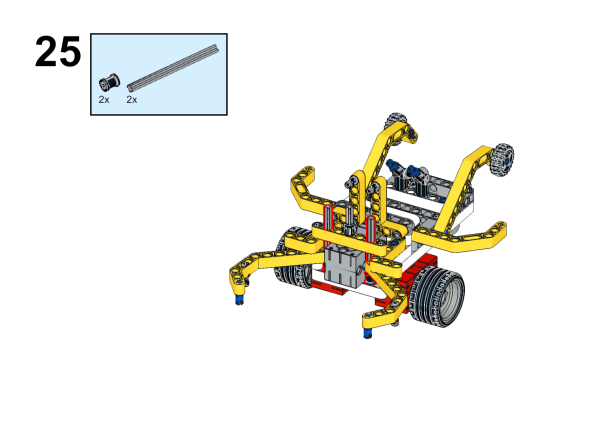
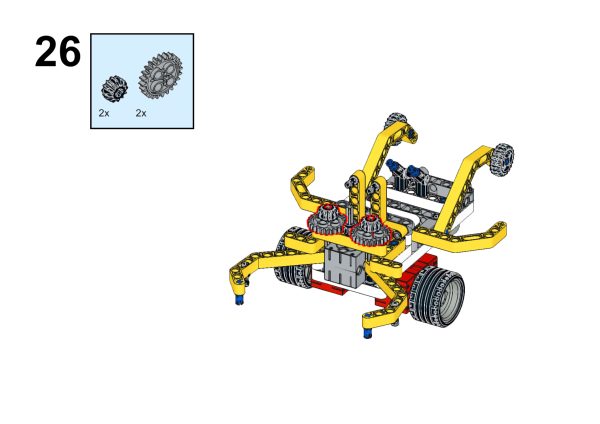
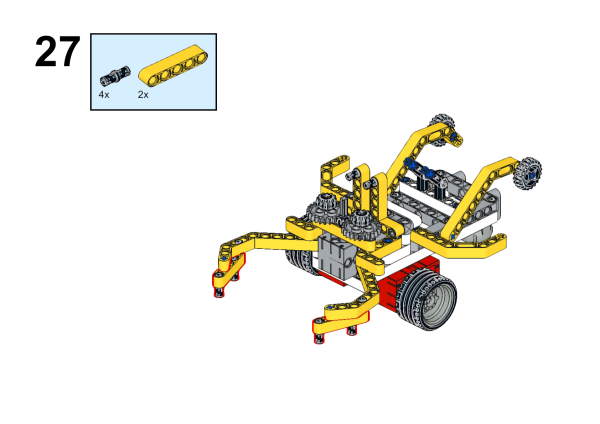
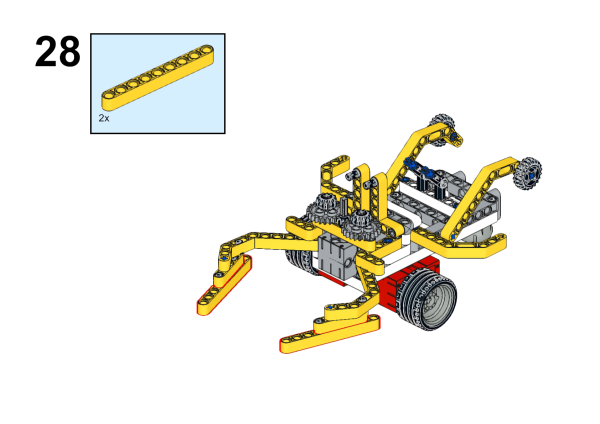
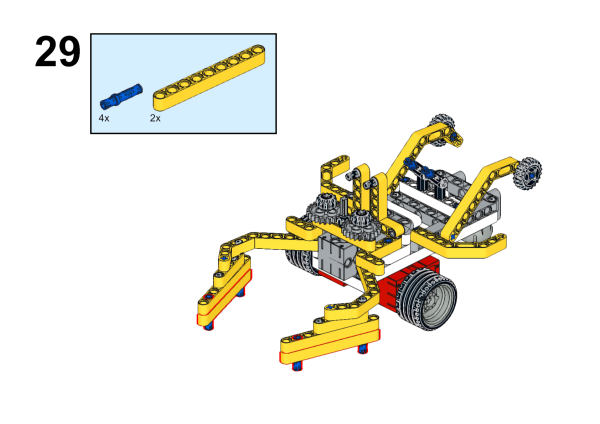
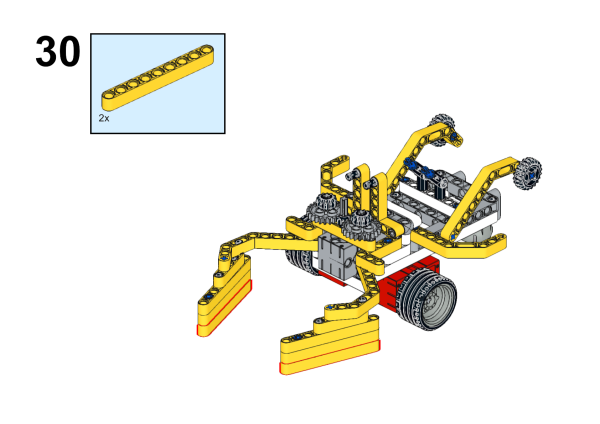
Assembly
Components List
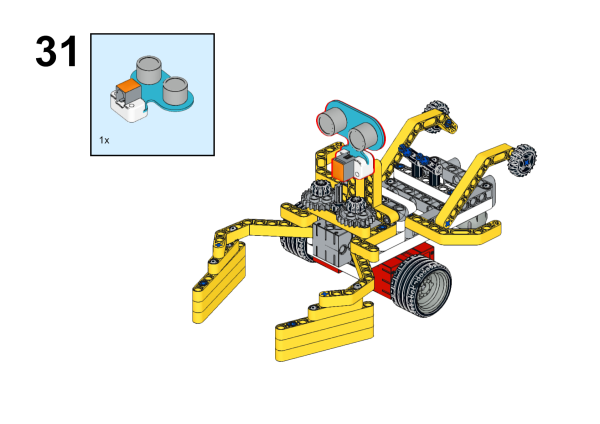
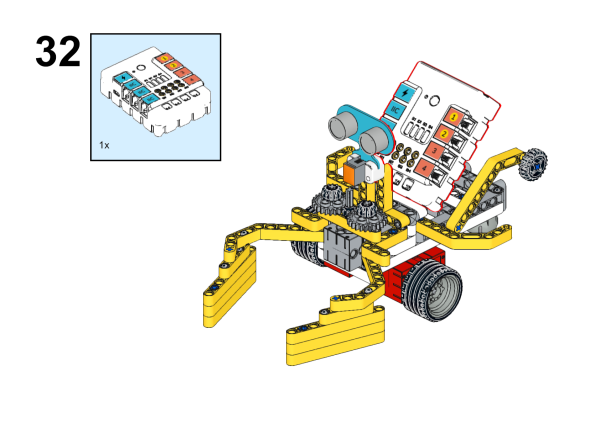
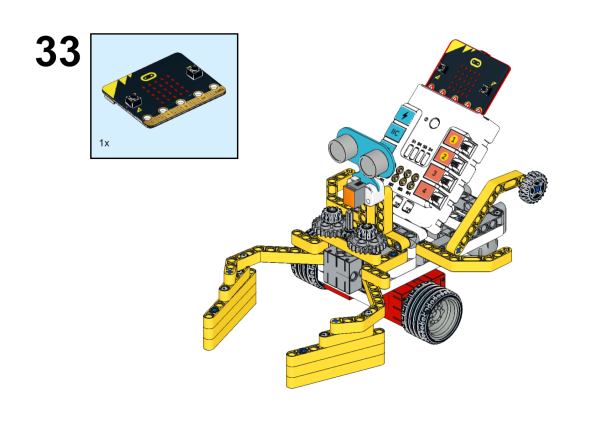
Build it as the assembly steps suggest:
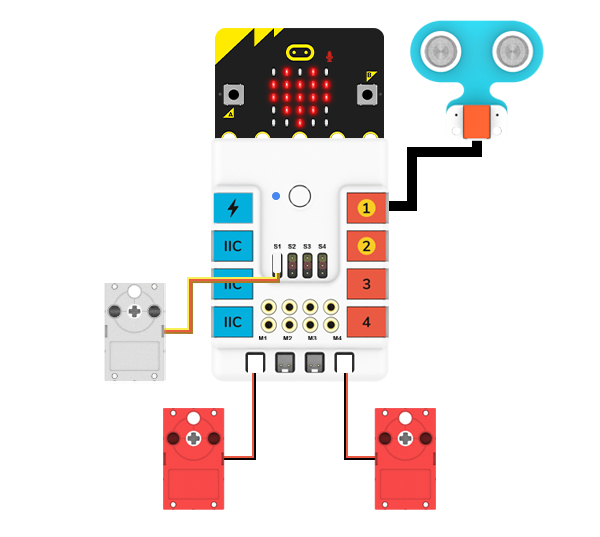
Connection Diagram
Connect the Ultrasonic Sensor to J1, the geekservo to S1 and the two motors to M1 and M4 on Nezha Breakout Board.
MakeCode Programming
Step 1
Click "Advanced" in the MakeCode drawer to see more choices.
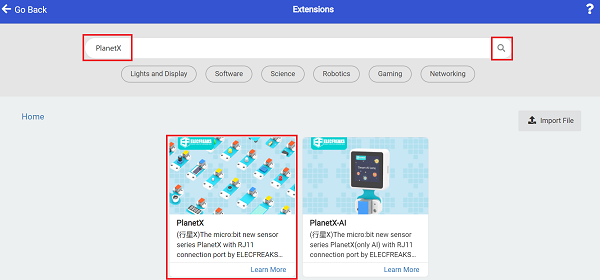
For programming the Ultrasonic Sensor, we need to add a package. Search with "PlanetX" in the dialogue box and click to download it.
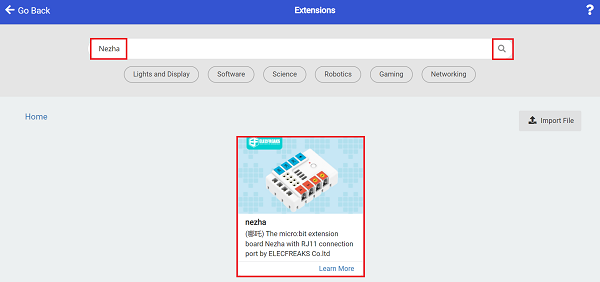
For programming Nezha Breakout Board, we need to add a package. Search with "Nezha" in the dialogue box and click to download it.
Notice: If you met a tip indicating that some codebases would be deleted due to incompatibility, you may continue as the tips say or create a new project in the menu.
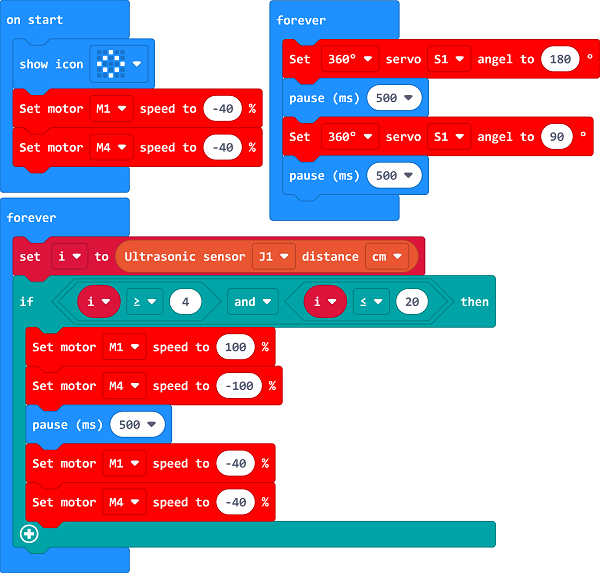
Step 2
Code as the picture suggests
Reference
Link: https://makecode.microbit.org/_iscUF8CzzYMd
You may also download it directly:
Result
After powering on, the mechanical shrimp moves forward and waves the princers, it will turn the directions if there is obstacles being detected.