硬件装配
步骤
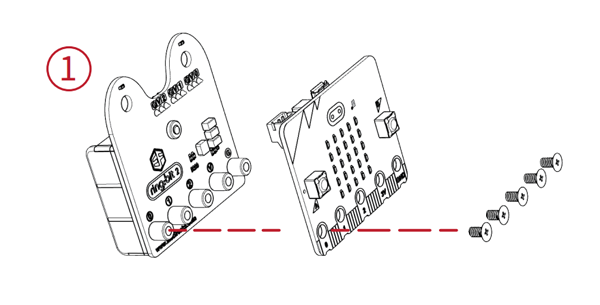
步骤一
- 使用较短的平头螺丝将micro:bit安装到Ring:bit扩展板上面。
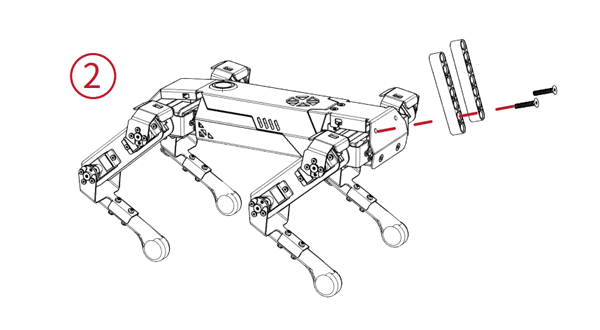
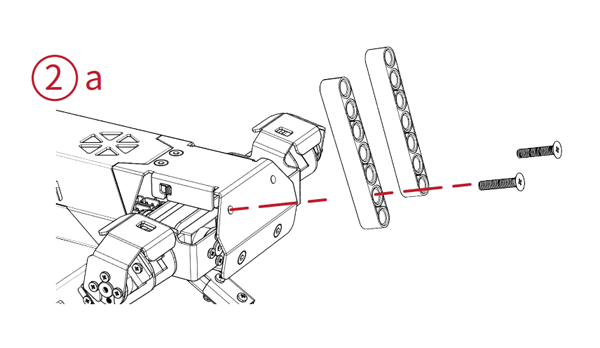
步骤二
- 使用较长的平头螺丝将七孔梁固定到 XGO 相应的螺孔上面。
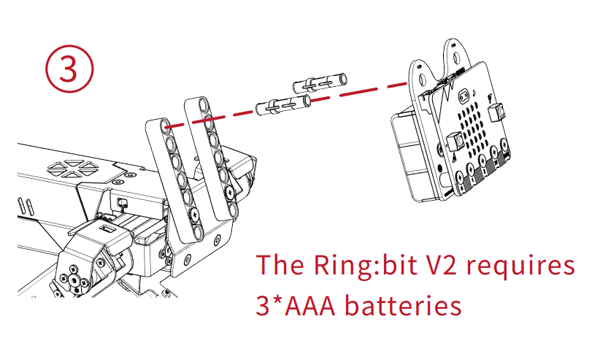
步骤三
- 将安装了 micro:bit 的 Ring:bit 扩展板使用长销安装到七孔梁上面。
步骤四
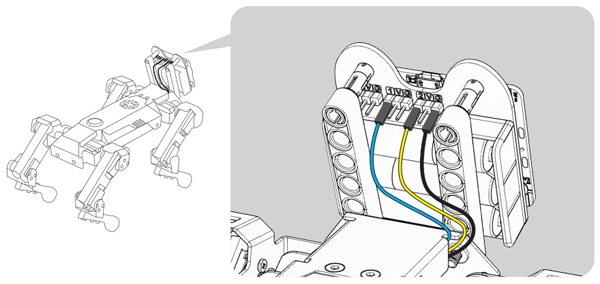
- 将 XGO 预留的杜邦线连接到 Ring:bit 相应的端口上面,其中,黑色杜邦线连接到G端口,黄色杜邦线和蓝色杜邦线接在1号和2号端口上面,在编程的时候要选择相应的端口号。
步骤五
- 使用数据线将电脑和 micro:bit 相连接;
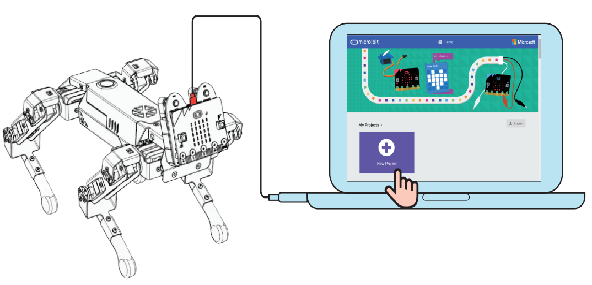
开始编程
XGO 的程序编写是在 Makecode 平台进行; Makecode平台可以使用图形化编程,同时还可以使用python代码编程和JavaScript代码编程;
添加 XGO 扩展库
步骤图如下:
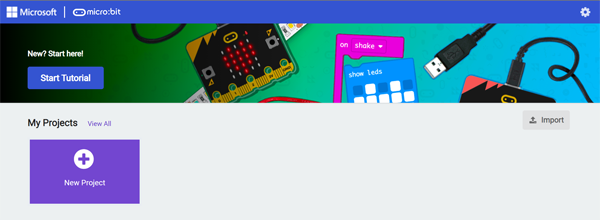
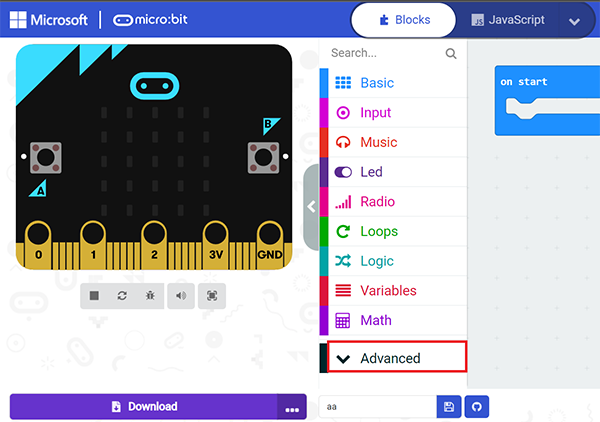
- 新建程序,命名程序名后点击积木库中的Advanced按钮,如下:
- 点击Extentions按钮,如下:
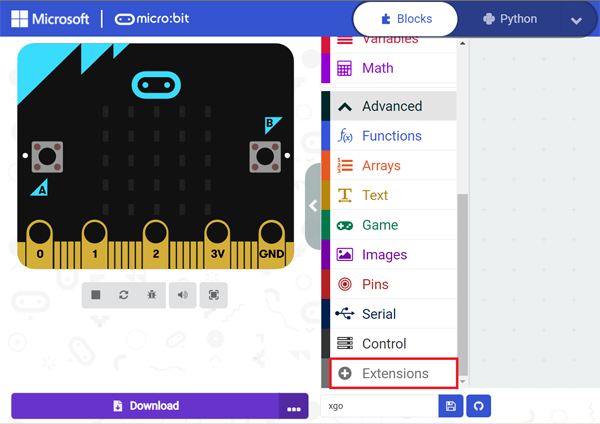
- 在输入框输入:XGO 搜索 XGO 的扩展库,如下:
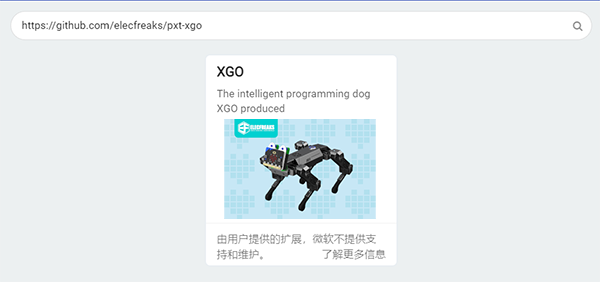
注意:若通过搜索 XGO 没有得到相应的结果,可以输入:https://github.com/elecfreaks/pxt-xgo ,如下:
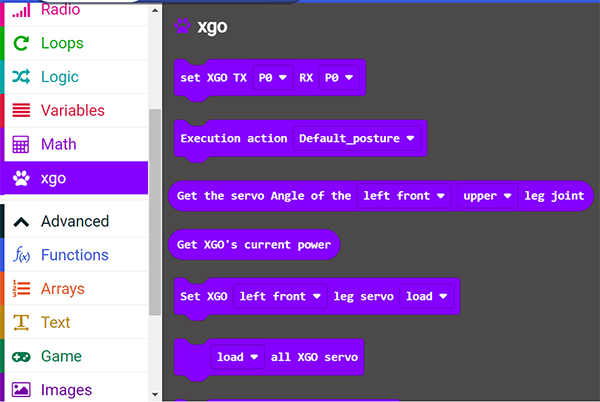
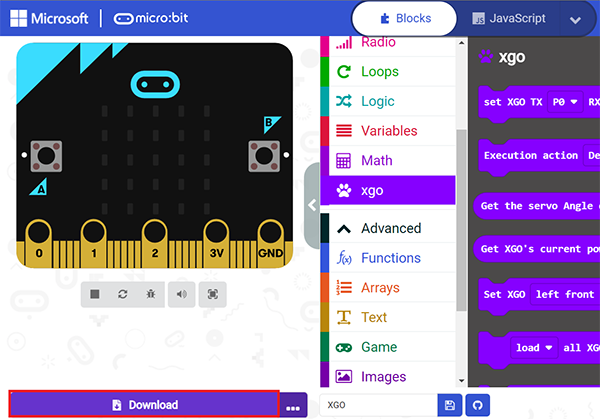
- 点开 XGO 积木块库可以看到如下积木块:
- 当程序编写完成,将micro:bit和电脑用数据线进行相连接,然后点击左下角的Download按钮,将程序下载到micro:bit主板上;
编程指南
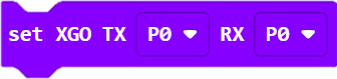
初始化 XGO
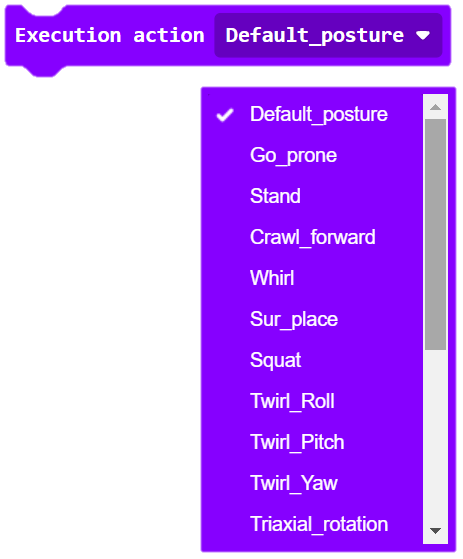
设置 XGO 动作,一共12种动作,可以任选一种动作;
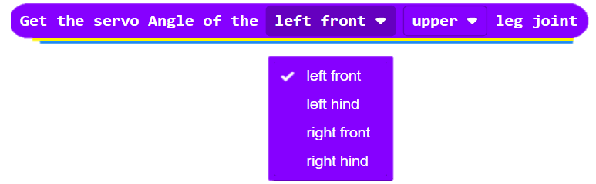
获取 XGO 四肢关节的舵机角度以及获取 XGO 的当前电量;

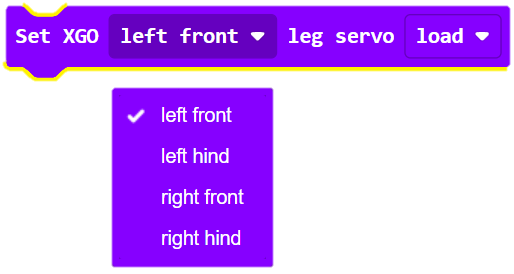
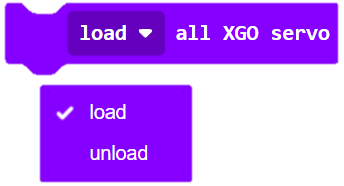
设置 XGO 单个腿部舵机加载和全部腿部舵机为调试模式;
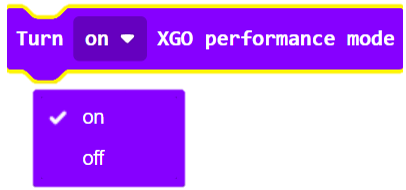
打开或关闭 XGO 的表演模式;
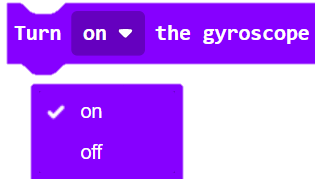
打开或关闭 XGO 的陀螺仪;
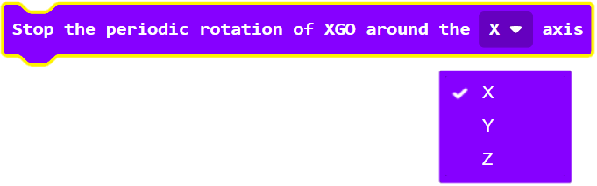
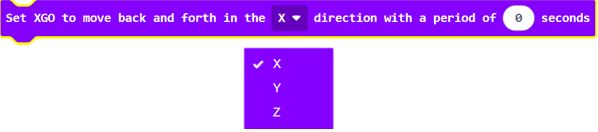
停止 XGO 周期绕X,Y,Z轴往复转动;
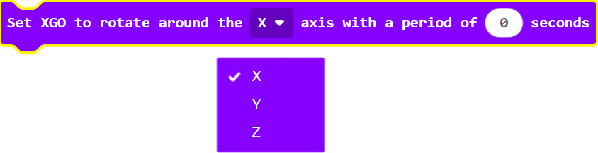
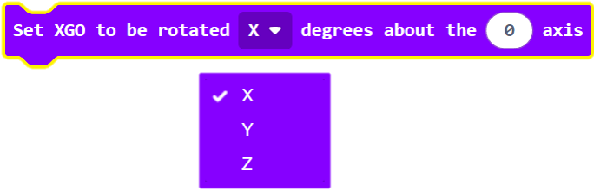
设置 XGO 绕 X,Y,Z轴往复转动的时间、度数;
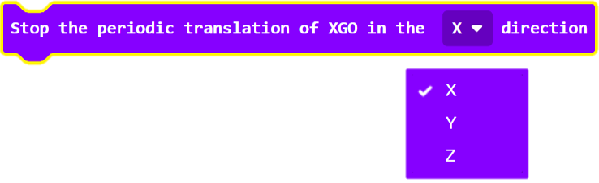
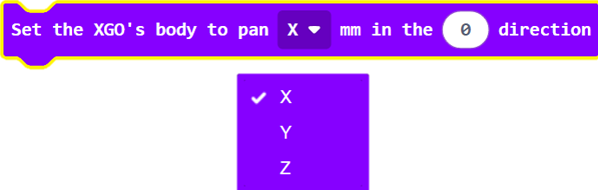
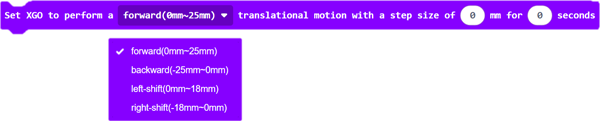
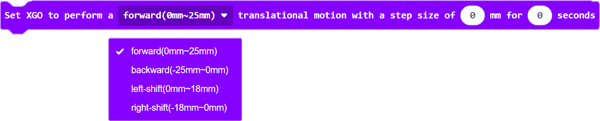
设置 XGO 向X,Y,Z方向平移或停止以及移动的时间;
设置 XGO 腿部抬高的距离和时间;


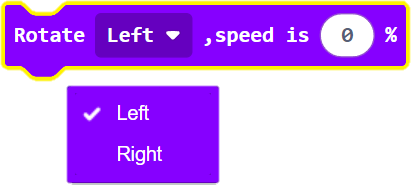
设置 XGO 旋转运动的方向、速度、时间;


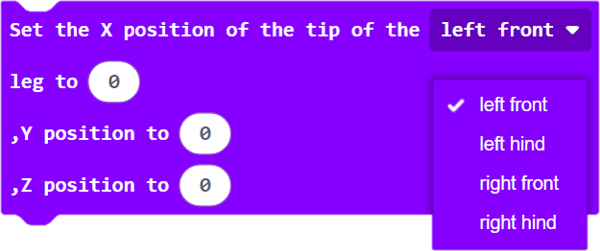
设置 XGO 四足的足尖方向;
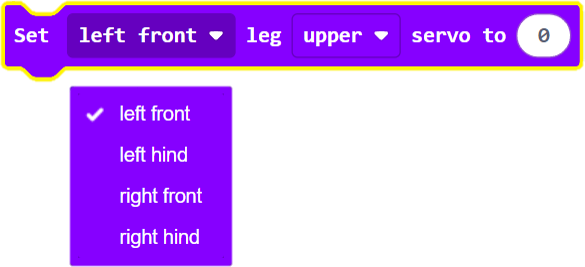
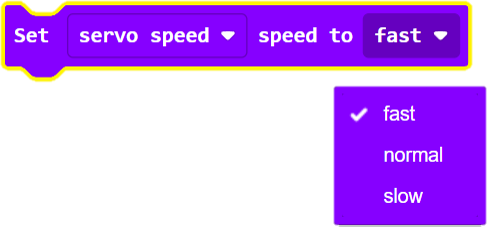
设置 XGO 四足关节的舵机转动和设置舵机速度或者迈步频率;
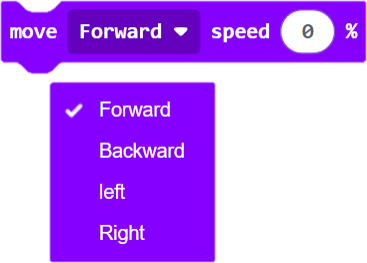
设置 XGO 移动或旋转以及相应的速度;
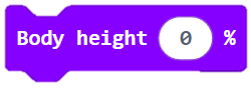
设置 XGO 身体高度;
简单示例
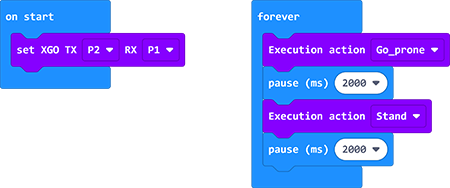
参考程序链接:XGO
同时,可以直接下载下方程序;
常见问题
注意:想要运行编号的代码程序要打开 Ring:bit 的开关,同时也要关注 XGO 的电量是否充足