案例08 - 瑟瑟发抖的 XGO
介绍
哈喽,经过前几节课的内容,我相信你对 XGO 的控制已经很熟练了,接下来,我们将 XGO 当做真正的小狗来控制它,让它看起来就像真的小狗一样,我们知道小狗狗在受冷后会全身抖动,这节课程我们就来设计这样的效果,那我们开始吧。
快速开始
使用材料
micro:bit XGO Robot Kit 套件 × 1
micro:bit × 1
硬件连接
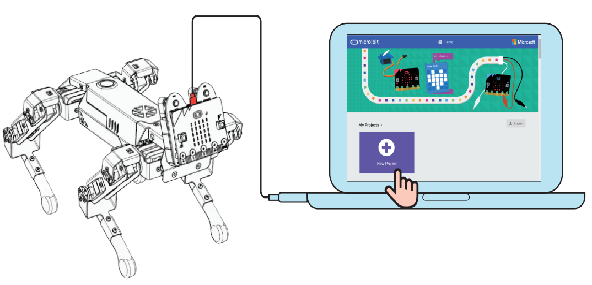
我们使用数据线(USB 线)将电脑与 micro:bit 相连,相信你已经很熟练了。
MakeCode 编程
XGO 的程序编写是在 Makecode 平台进行; Makecode平台可以使用图形化编程,同时还可以使用python代码编程和JavaScript代码编程;
步骤一
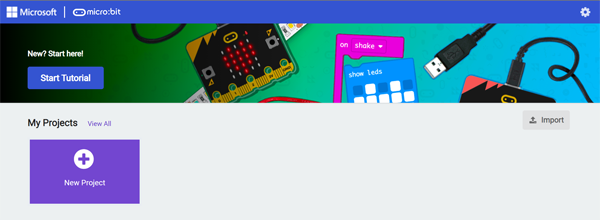
- 新建项目,命名程序名后点击积木库中的扩展按钮,如下:
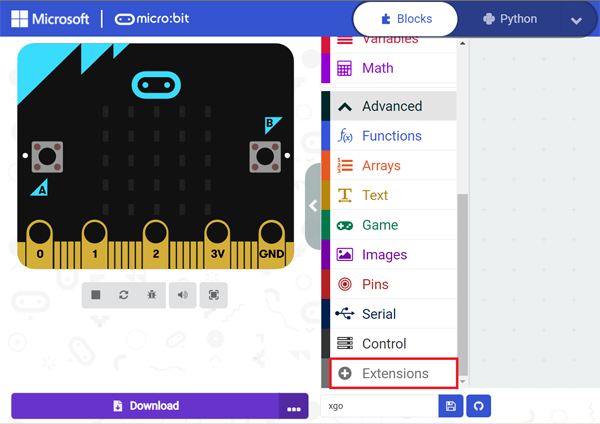
- 在输入框输入:XGO 或者 XGO Robot Kit 搜索到 xgo 扩展库,如下:
注意: 如果您遇到提示某些代码库由于不兼容而将被删除的提示
步骤二
示例程序
相关问题
思考
能否添加当 XGO 趴下一段时间后,然后离开的设置?