案例三: 让机器人“听话”
案例简介
掌握MakeCode图形化编程基础,理解“指令与动作”的对应关系,通过拖拽编程模块、实操调试,培养学生基础编程逻辑与动手实操能力,感受编程的趣味性与实用性。
教学准备
| 名称 | 图示 |
|---|---|
| PU机器人套装 |  |
| 编程设备(电脑) | |
| 平整地面 |
课程目标
掌握MakeCode图形化编程基础
学会添加软件库,下载程序
通过编程控制机器人行走
课程引入
上节课我们用遥控器让机器人听话,今天我们要学习一种更神奇的方法——编程,通过拖拽模块、设置指令,让机器人按照我们的想法完成动作,就像给它设置了专属密码一样,接下来我们就一起走进MakeCode编程世界,解锁机器人的编程技能吧!
学习探究
工具认知:引导学生打开电脑上的MakeCode编程页面,介绍工具的基本界面(积木抽屉、编程区),重点讲解“动作模块”“控制模块”的位置与作用,帮助学生建立对图形化编程工具的初步认知。
模块学习:教师聚焦核心需求,讲解“行走”“停止”“踢腿”等基础动作模块的使用方法,演示“拖拽模块、组合指令”的操作,引导学生理解“每个模块对应一个具体动作”,明确“编程就是将多个动作模块组合,给机器人下达连贯指令”的核心逻辑。
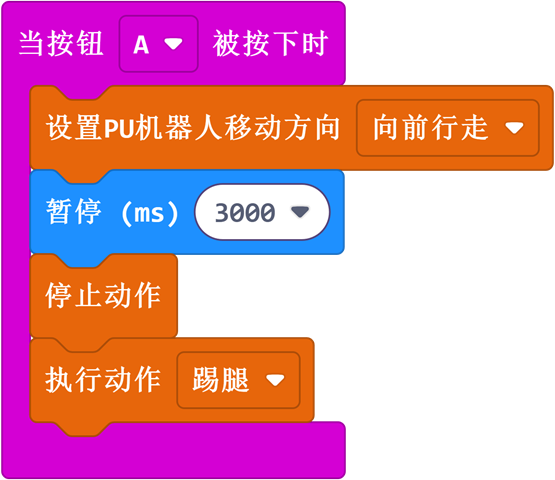
实操探究:教师给出示例任务(前进3秒→停止→踢腿1次),引导学生分组尝试拖拽对应动作模块,设置动作时长、调整模块顺序,结合数学知识计算动作时长的合理性,让学生在实践中感知“指令与动作”的对应关系,理解编程的核心原理。
Makecode编程
编程平台
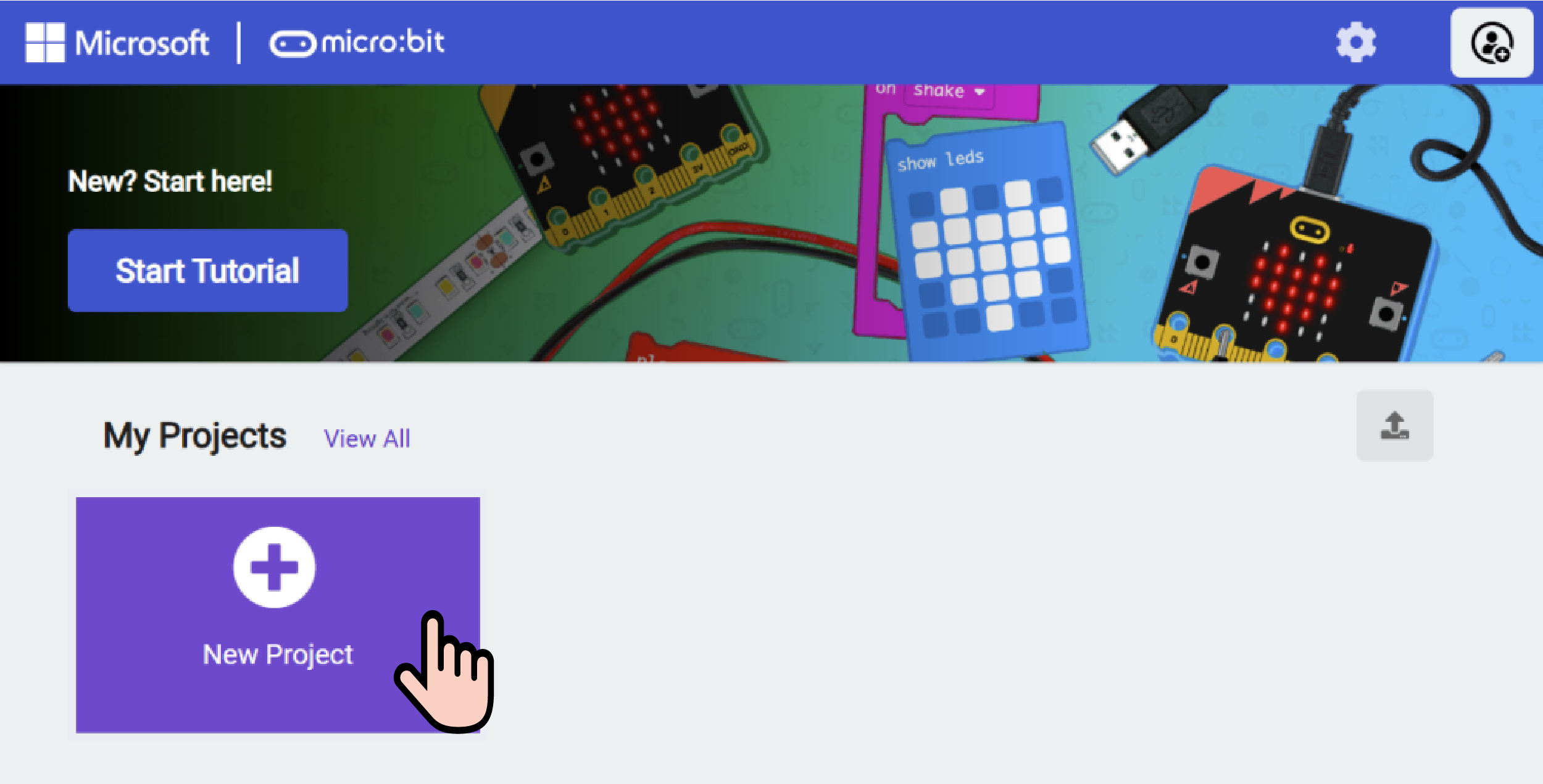
进入“makecode.microbit.org”,点击新建项目。
新建项目
在弹出窗口输入项目名称并点击创建。

添加软件库
点击代码抽屉中的扩展。

在弹出界面输入pu robot并点击搜索图标,在显示pu robot软件库后点击。

编写程序
程序链接:https://makecode.microbit.org/_DwbHT85Ve5a1
下载程序
为了下载程序,我们需要先将PU Robot上面的micro:bit,取下来。
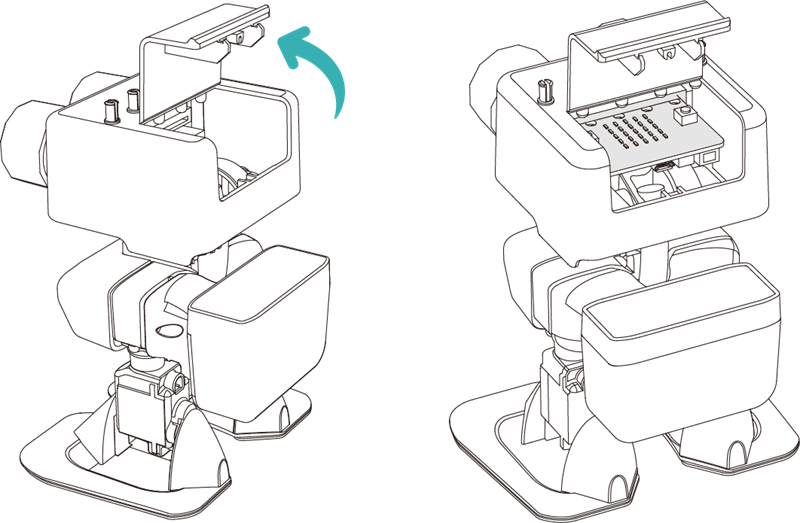
micro:bit拆卸与安装
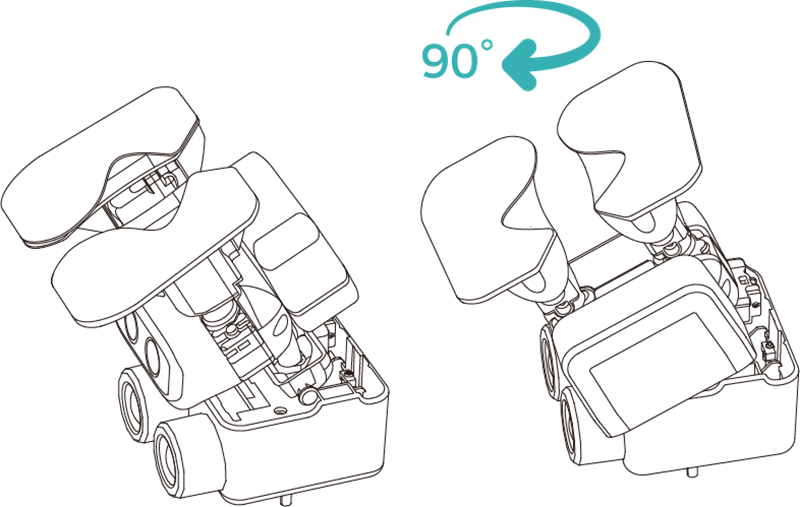
- 将PU机器人身体旋转90°
- 拧下固定螺丝
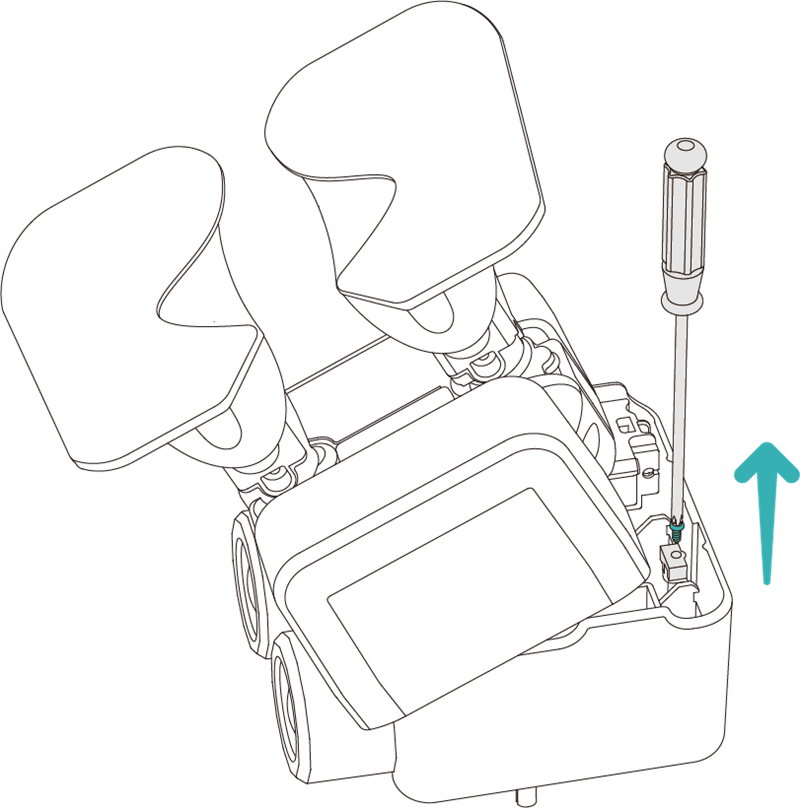
- 打开头盖,取出micro:bit
警告:PU机器人通电时,请勿强行扭动其关节,这将对伺服电机造成损坏。
程序下载步骤
使用 USB 线连接 PC 和 micro:bit V2。

连接成功后,电脑上会识别出一个名为 MICROBIT 的盘符。

点击左下角的 ,选择Connect Device。
,选择Connect Device。

点击 。
。

点击 。
。

在弹出窗口选择 BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的 micro:bit 就已经连接成功。

点击下载程序

结果
PU机器人向前行走三秒后执行踢腿动作。