案例一: PU机器人基础动作模仿秀
案例简介
了解PU机器人的结构,熟悉PU机器人的基础操作。
教学准备
| 名称 | 图示 |
|---|---|
| PU机器人套装 |  |
课程目标
认识PU机器人的基本部件,感知科技与工程设计的关联。 掌握PU机器人的遥控操作,培养动手操控能力。
课程引入
今天我们迎来了一位特别的小伙伴——PU机器人,它有着灵活的身体,还能做很多有趣的动作,大家想不想认识它、和它一起玩呀?
学习探究
部件探秘:教师引导学生分组观察PU机器人,重点观察PU全包外壳、头部舵机、关节部位(初步感知6-DOF灵活特性)的作用,结合简单讲解,帮助学生了解每个部件的基本功能。
动作感知:教师用遥控手柄操控PU机器人,演示行走、点头、踢腿等基础动作,引导学生观察机器人关节的活动,对比人类动作与机器人动作的异同,思考“机器人为什么能做出和人类相似的动作”,初步感知“舵机驱动”的简单原理,为后续遥控操作铺垫。
操控入门:教师简单讲解遥控手柄的基本操作(前进、转弯、停止、动作切换),强调操作要点,引导学生初步感知遥控指令与机器人动作的对应关系,为课堂活动中的实操练习做好准备。
课堂活动
活动一:部件观察小任务

| 序号 | 名称 | 中文说明 |
|---|---|---|
| 1 | 头壳 × 1 | 固定电路板、电池、头部舵机;带积木销适配器孔,可连接积木。 |
| 2 | 灯座支架 × 2 | 固定灯头并安装到头壳上。 |
| 3 | 灯头 × 2 | 实现LED灯光效果。 |
| 4 | 肩部支架 × 1 | 固定颈部舵机;连接颈部支架与胸部支架。 |
| 5 | 胸部支架 × 1 | 固定腿部舵机;连接肩部支架与腿部。 |
| 6 | 前盖 × 1 | 固定超声波传感器并连接到胸部支架。 |
| 7 | 后盖 × 1 | 整理并固定线材;提供积木销孔;可连接背包及其他外部积木件。 |
| 8 | 左腿支架 × 1 | 固定左脚舵机。 |
| 9 | 左腿护盖 × 1 | 保护左脚舵机;连接腿部支架与左脚。 |
| 10 | 右腿支架 × 1 | 固定右脚舵机。 |
| 11 | 右腿护盖 × 1 | 保护右脚舵机;连接腿部支架与右脚。 |
| 12 | 左脚 × 1 | 连接左脚舵机,实现脚部动作。 |
| 13 | 右脚 × 1 | 连接右脚舵机,实现脚部动作。 |
| 14 | 背包 × 1 | 连接到后盖,可放置物品。 |
| 15 | 超声波传感器 × 1 | 测量与障碍物的距离。 |
| 16 | 积木销适配器 × 5 | 将头壳连接到外部积木件。 |

| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 头壳 × 1 | 固定电路板、电池、头部舵机;设有积木销适配器孔,用于连接积木组件。 |
| 2 | micro:bit 主控板 × 1 | 控制机器人及人工智能功能。 |
| 3 | 头部舵机 × 1 | 控制机器人抬头/低头。 |
| 4 | 头部舵机支架 × 1 | 固定头部舵机。 |
| 5 | 颈部支架 × 1 | 将颈部舵机和头部舵机连接至头壳。 |
| 6 | 后盖 × 1 | 整理并固定线路;提供积木销孔;可连接背包及其他外部积木组件。 |
| 7 | 左腿支架 × 1 | 固定左脚舵机。 |
| 8 | 右腿支架 × 1 | 固定右脚舵机。 |
| 9 | 左脚 × 1 | 连接左脚舵机,实现足部动作。 |
| 10 | 右脚 × 1 | 连接右脚舵机,实现足部动作。 |
活动二:机器人“模仿秀”
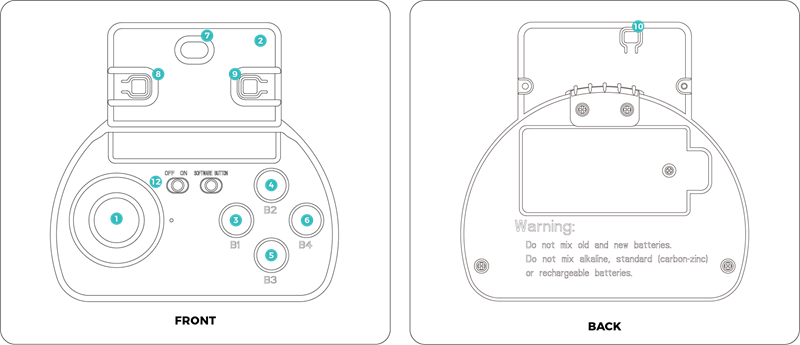
| 序号 | 控制项 | 功能说明 |
|---|---|---|
| 1 | 操纵杆 | 1. 向前/向后推动操纵杆,机器人将向对应方向移动,推动幅度越大,机器人移动速度越快 2. 向左/向右倾斜操纵杆,机器人将向对应方向转向,倾斜幅度越大,转向角度越大 3. 按下操纵杆一次,机器人进入休息模式 4. 将操纵杆大幅度向左/向右倾斜,机器人将向对应方向横移 |
| 2 | Micro:Bit 手势控制 | 使用操纵杆控制时,向上/向下倾斜手柄,可控制Pu的头部上下摆动;向左/向右倾斜手柄,可控制Pu的头部向对应方向转动 |
| 3 | B1 按钮 | 让Pu机器人进入自动驾驶模式,可自主行走或探索迷宫 |
| 4 | B2 按钮 | 让Pu机器人跳跃,适用于足球游戏和舞蹈场景。请勿连续按压此按钮,需等待上一次跳跃动作完成后,才能执行下一次跳跃 |
| 5 | B3 按钮 | 让Pu机器人跳舞。开启音乐后,Pu会跟随音乐节奏跳舞,其LED灯也会随节拍变换颜色 |
| 6 | B4 按钮 | 让Pu机器人踢球,适用于足球游戏场景。请勿连续按压此按钮,需等待上一次踢球动作完成后,才能执行下一次踢球 |
| 7 | Micro:Bit 感应Logo | 触摸Micro:Bit的Logo区域,Pu机器人会随机说话或唱歌,内容取决于它近期的活动状态,可通过编程修改出厂默认行为 |
| 8 | Micro:Bit A键 | 增加无线电控制频道,频道编号会同步显示在Micro:Bit的屏幕上 |
| 9 | Micro:Bit B键 | 减少无线电控制频道,频道编号会同步显示在Micro:Bit的屏幕上 |
| 10 | Micro:Bit 复位键 | 重启手柄控制程序,无线电控制频道将恢复为默认值6 |
| 11 | Micro:Bit A+B组合键 | 同时按下A键和B键,显示当前实际无线电控制频道(实际频道号=屏幕显示数值+160) |
| 12 | 电源开关 | 开启/关闭手柄电源 |
总结分享
邀请学生分享自己操控机器人的感受,说说自己认识了机器人的哪些部件、学会了哪些操作;教师总结本节课重点,鼓励学生课后继续探索机器人的有趣功能。