案例02 保持距离
目的
- 使用motor:bit智能车载套件完成保持一定距离功能。
使用材料
- 1 x motor:bit 智能车载套件
背景知识
什么是超声波
- 超声波是一种频率高于20000赫兹的声波,它的方向性好,穿透能力强,易于获得较集中的声能,在水中传播距离远,可用于测距、测速、清洗、焊接、碎石、杀菌消毒等。超声波因其频率下限大于人的听觉上限而得名。
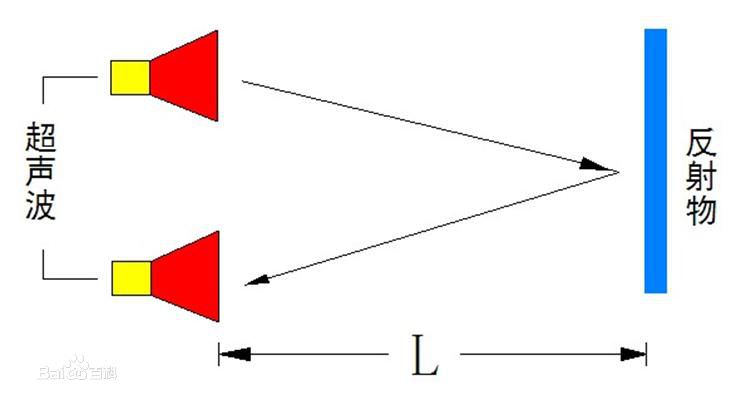
超声波测距原理
- 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。根据接收器接到超声波时的时间计算距离,与雷达测距原理相似。
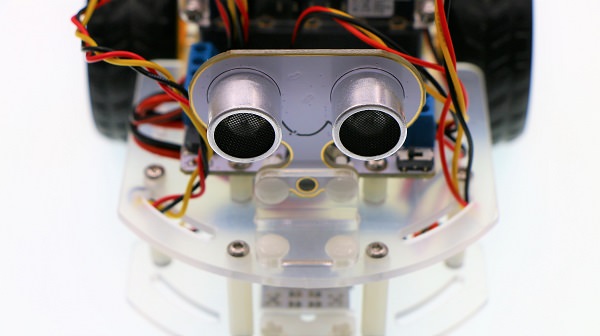
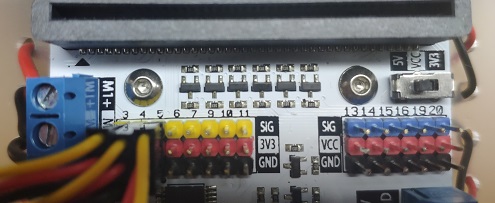
硬件连接图
如图所示,将超声波模块连接到P5引脚。
软件
微软makecode在线积木块编程https://makecode.microbit.org/#
编程
步骤 1
在MakeCode的代码抽屉中点击高级,查看更多代码选项。

为了给motorbit主板编程,我们需要添加一个代码库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框。搜索“motorbit",然后点击下载这个代码库。
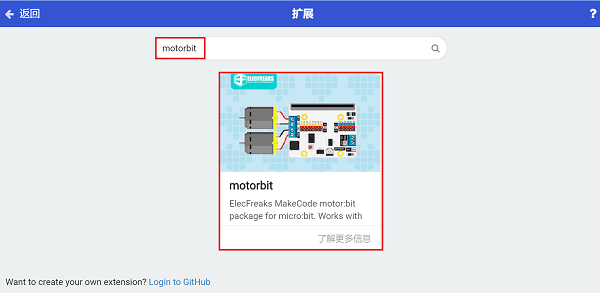
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2
- 在
当开机时积木块中插入以...的速度前进积木块,设置参数为80,表示上电时以80的速度前进。 - 将超声波初始化为以厘米为单位,读取P5引脚,返回值赋值给
item变量。 - 如果返回的参数大于10并且小于20,设置左右电机速度为0,停车。
- 如果返回的参数小于10,设置电机以80的速度倒车。
- 如果返回的参数都不符合,设置电机以80的速度前进。

程序
请参考程序连接:https://makecode.microbit.org/_5uq9T8d0p6hP
你也可以通过以下网页直接下载程序。
结论
- 车辆上电以80的速度向前直行,当用手挡住车辆前进方向20cm至10cm之间时,车辆停止运动,当手再次向车辆靠近且距离小于10cm时,车辆往后倒退到距离大于5cm后停止。