软件库说明
编程平台
进入“makecode.microbit.org”,点击新建项目。
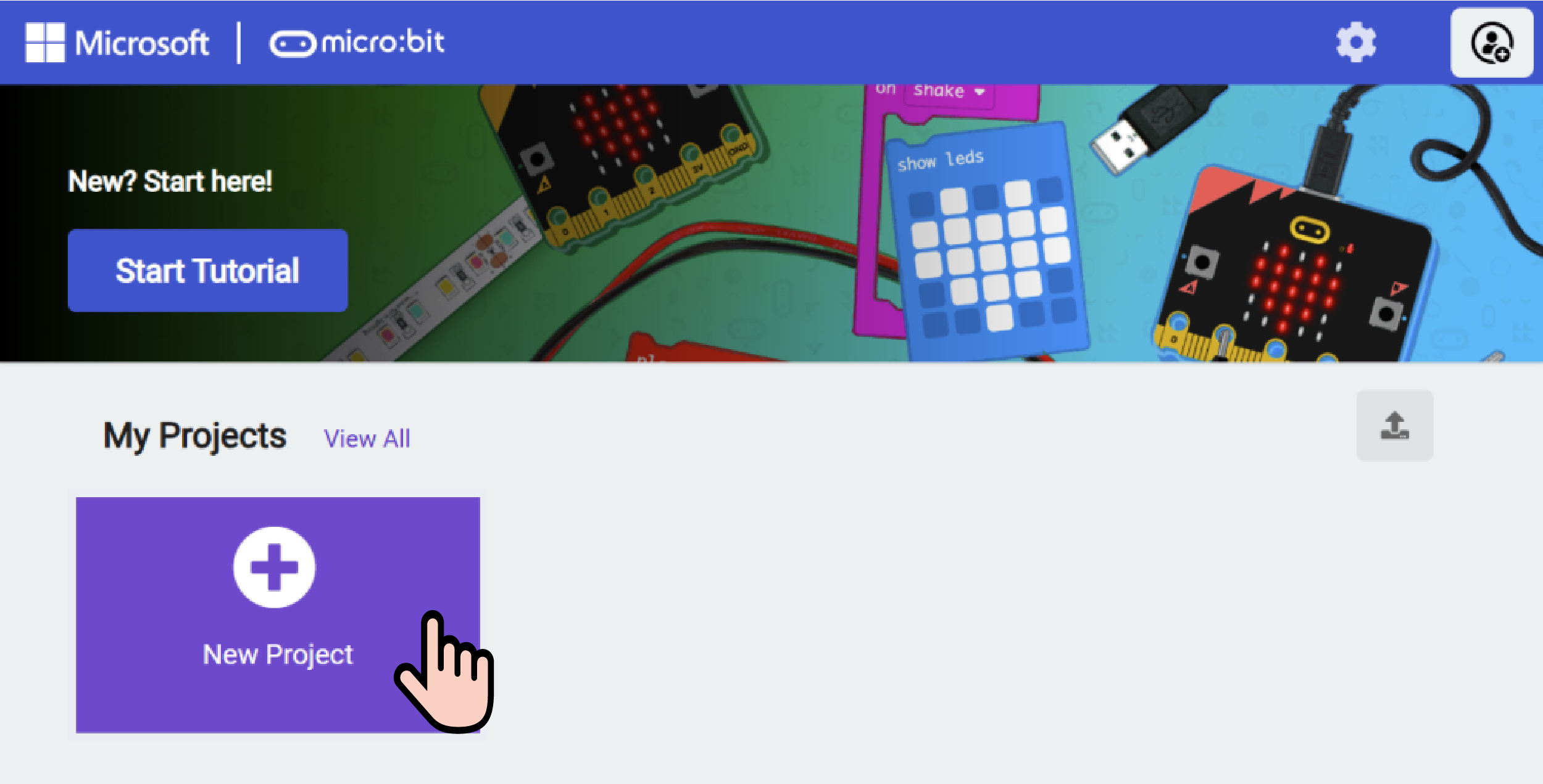
新建项目
在弹出窗口输入项目名称并点击创建。

添加软件库
点击代码抽屉中的扩展。

在弹出界面输入pu robot并点击搜索图标,在显示pu robot软件库后点击。

积木块说明
| 功能 | 命令 | 参数 | 详解 |
|---|---|---|---|
 | 设置行走速度范围前进(参数1)后退(参数2) | 参数1:数字量(0~4)参数2:数字量(0~3) | 配置机器人前进 / 后退最大速度 |
 | 超声波传感器返回值(厘米/英寸) | ||
 | 机身滚动角 | ||
 | 机身俯仰角 | ||
 | 音乐节拍 | ||
 | 前方距离数组 | ||
 | 设置氛围灯(参数1)灯光颜色R:(参数2)G:(参数3)B:(参数4) | 参数1:可选项(1/2/3/4/all)参数2~4:数字量,(0~255) | |
 | 设置左眼(参数1)右眼(参数2) | 参数1:可选项(开/关)参数2:可选项(开/关) | |
 | 设置左眼亮度(参数1) | 参数1:数字量,0~100 | |
 | 设置右眼亮度(参数1) | 参数1:数字量,0~100 | |
 | 设置(参数1)舵机转动到(参数2)度 | 参数1:可选项(左脚/左腿/右脚/右腿/头部偏移/头部俯仰)参数2:数字量(0-180,默认 90) | |
 | 平滑设置(参数1)舵机角度为(参数2)步长(参数3) | 参数1:可选项(左脚/左腿/右脚/右腿/头部偏移/头部俯仰)参数2:数字量(0-180,默认 90)参数3:数字量 | 平滑设置舵机角度。以指定步长将指定舵机平滑旋转到目标角度。 |
 | 执行动作(参数1) | 参数1:可选项(打招呼/休息/自主探索/跳跃/跳舞/踢腿) | |
 | 设置PU机器人(参数1) | 参数1:可选项(向前行走/向后行走/向左侧移/向右侧移/向左转/向右转) | |
 | 设置(参数1)走(参数2)步以速度(参数3) | 参数1:可选项(向前行走/向后行走/向左侧移/向右侧移/向左转/向右转)参数2:数字量 参数3:数字量 | |
 | 说话(参数1) | 参数1:字符串 | |
 | 唱歌(参数1) | 参数1:字符串 | |
 | 停止动作 | 无 | 设置机器人停止动作 |