案例四: 动作顺序与延时优化
案例简介
在熟练运用“当按键A被按下”“直线行走”“踢腿”“延时”积木块的基础上,引导学生探究动作顺序对机器人执行效果的影响,学习优化延时参数,深化编程逻辑,提升程序调试能力,为后续组合动作编程奠定基础。
教学准备
| 名称 | 图示 |
|---|---|
| PU机器人套装 |  |
| 编程设备(电脑) | |
| 平整地面 |
课程目标
熟练运用“当按键A被按下”“直线行走”“踢腿”“延时”积木块,掌握各积木块的核心用法;
学会调整机器人动作顺序,观察不同顺序的执行效果,理解“指令顺序决定动作顺序”的编程逻辑;
掌握延时参数的优化方法,能根据动作完成时长合理设置延时,提升程序的流畅度;
培养基础编程调试能力和逻辑思维,为后续组合动作编程铺垫。
课程引入
上节课我们学会了用‘当按键A被按下’‘直线行走’‘踢腿’‘延时’积木块编写简单程序,有同学发现,有时候机器人动作衔接不流畅,或者动作顺序不符合预期,这是为什么呢?今天我们就来探究其中的奥秘,学习调整动作顺序、优化延时参数,让机器人的动作更流畅、更符合我们的要求。
学习探究
旧知回顾:引导学生回顾上一节课所学的“当按键A被按下”“直线行走”“踢腿”“延时”积木块,提问:“每个积木块的作用是什么?我们之前编写的程序顺序是怎样的?” 请学生上台演示积木块的拖拽与组合,巩固旧知,为新课学习做好铺垫。
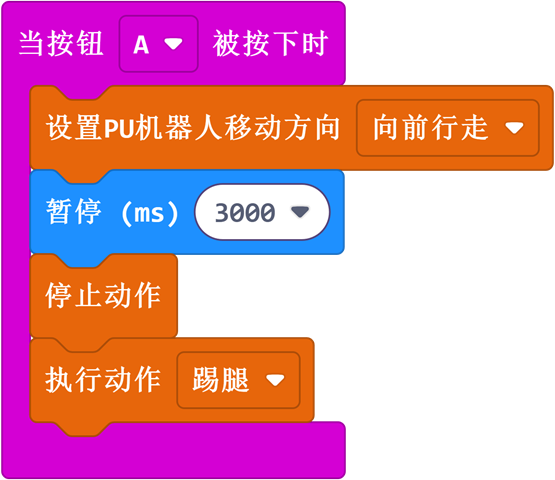
动作顺序探究:提出探究问题:“如果改变动作顺序,机器人的执行效果会不一样吗?” 引导学生分组讨论,猜测不同动作顺序的执行效果,随后给出任务:编写两组程序,一组为“当按键A被按下→直线行走→延时3秒→踢腿1次→停止”,另一组为“当按键A被按下→踢腿1次→延时1秒→直线行走→延时3秒→停止”,下载到机器人中测试,记录两组程序的执行差异,总结“动作顺序不同,机器人执行效果不同”的结论。
延时参数优化:针对程序中动作衔接不流畅的问题,引导学生思考:“延时积木块的作用是什么?延时参数设置得太长或太短,会有什么影响?” 引导学生尝试调整延时参数,如将“直线行走”后的延时从3秒调整为2秒、4秒,观察机器人动作衔接的流畅度,总结规律:延时参数需贴合动作完成时长,过长会导致动作间隔过长,过短会导致动作衔接卡顿。
- 课堂活动:组织完成一次编程控制机器人完成行走挑战赛,地图可根据课堂场地情况自主设计
Makecode编程
程序一:
程序链接:https://makecode.microbit.org/_DwbHT85Ve5a1
程序二:

程序链接:https://makecode.microbit.org/_X7JH8pYaKXV0
总结分享
邀请各组分享编程体验和课堂活动的观察结果,教师结合学生分享,简单讲解程序顺序执行和延迟积木块的作用。