软件库说明文档
cutebot软件积木块详解
| 积木块 | 功能 | 参数 |
|---|---|---|
 | 设置小车左轮或右轮的速度 | 参数一:数值 数值范围:-100~100 参数二:数值 数值范围:-100~100 |
 | 设置小车以固定速度朝某个方向运行指定时间 | 参数一:下拉选项 可选项:前进、后退、左、右 参数二:整数 数值范围为-100~100 参数三:自然数 |
 | 设置小车全速前进 | |
 | 设置小车全速后退 | |
 | 设置小车全速左转 | |
 | 设置小车全速右转 | |
 | 设置小车立刻停车 | |
 | 设置小车车头灯为预设颜色 | 参数一:下拉选项 可选项:右侧RGB、左侧RGB、全部 参数二:下拉选项 选项:  |
 | 以RGB模式设置小车车头灯颜色 | 参数一:下拉选项 可选项:右侧RGB、左侧RGB、全部 参数二:自然数 数值范围:0 ~ 255 参数三:自然数 数值范围:0 ~ 255 参数四:自然数 数值范围:0 ~ 255 |
 | 关闭小车车头灯 | |
 | 判断两个巡线传感器的状态 | 参数一:下拉选项 可选项:黑黑、白黑、黑白、白白 |
 | 分别判断两个巡线传感器的状态 | 参数一:下拉选项 可选项:左、右 参数二:下拉选项 可选项:找到、丢失 |
 | 当小车的巡线头检测到对应状态时,执行内部程序 | 参数一:下拉选项 可选项:左、右 参数二:下拉选项 可选项:找到、丢失 |
 | 检测小车前方障碍物的距离 | 参数一:下拉选项 可选项:厘米、英寸 |
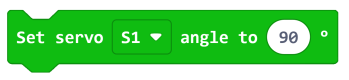 | 设置连接到指定接口的180°舵机转动到指定角度 | 参数一:下拉选项 可选项:S1、S2 参数二:自然数 数值范围:0 ~ 180 |
 | 当接收到红外信号时,执行内部程序 | |
 | 判断接收到的红外信号信息 | 参数一:下拉选项 可选项:Menu、Up、Left、Right、Down、OK、Plus、Minus、Back、0、1、2、3、4、5、6、7、8、9 |
joysticks:bit V2软件积木块详解
| 积木块 | 功能 | 参数 |
|---|---|---|
 | 设置手柄震动 | 参数一:自然数 |
 | 获取摇杆X轴或者Y轴的返回值 | 参数一:下拉选项 选项:X轴、Y轴 |
 | 当指定按键处于设定状态时,运行内部程序 | 参数一:下拉选项 选项:C、D、E、F 参数二:下拉选项 选项:按下、松开 |
 | 判断按键状态 | 参数一:下拉选项 选项:C、D、E、F |
 | 初始化手柄 |