Case 03 走正方形
简介
本课程旨在通过制作智能赛车,让学生学习和探索小车电机控制和转弯方式等知识点,以及应用这些知识让小车沿着正方形轨迹行驶。

教学目标
学会控制小车的前进、后退和停止。
掌握不同转弯方式的原理,包括直角转弯和圆弧转弯,并能够将其应用于实现小车沿着正方形轨迹行驶。
教学准备
Cutebot Pro × 1
micro:bit × 1
教学过程
课程引入
大家好!今天我们将要继续我们的智能赛车制作项目,但这次我们要给小车设置一个新的挑战,让它可以沿着正方形的轨迹行驶。你们认为怎样才能让小车准确地走出一个完美的正方形?
我们可以通过控制小车的电机和转弯方式来实现这个目标。在接下来的课程中,我们将学习如何控制小车的前进、后退和停止,并学习两种不同的转弯方式。这些知识将帮助我们让小车沿着正方形的轨迹行驶。
探究活动
直角转弯和圆弧转弯的区别。
示例代码
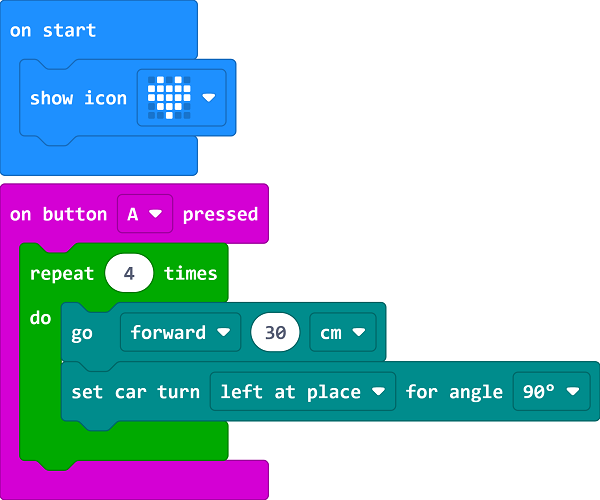
请参考程序连接:https://makecode.microbit.org/S98772-91695-07661-14383
你也可以通过以下网页直接下载程序。
团队合作与展示
学生分成小组,共同完成小车的制作和程序编写。
鼓励学生之间相互合作、交流和分享经验。
每个小组有机会向其他小组展示他们制作的智能赛车。
总结与反思
回顾课程内容,提醒学生掌握了哪些知识和技能。
引导学生讨论他们在制作过程中遇到的问题和困难,以及如何解决这些问题。
引导学生思考小车除了走正方形,还能走出什么样的轨迹呢?如果将一只笔固定在小车身上,是否可以通过控制小车的行进轨迹来作画。