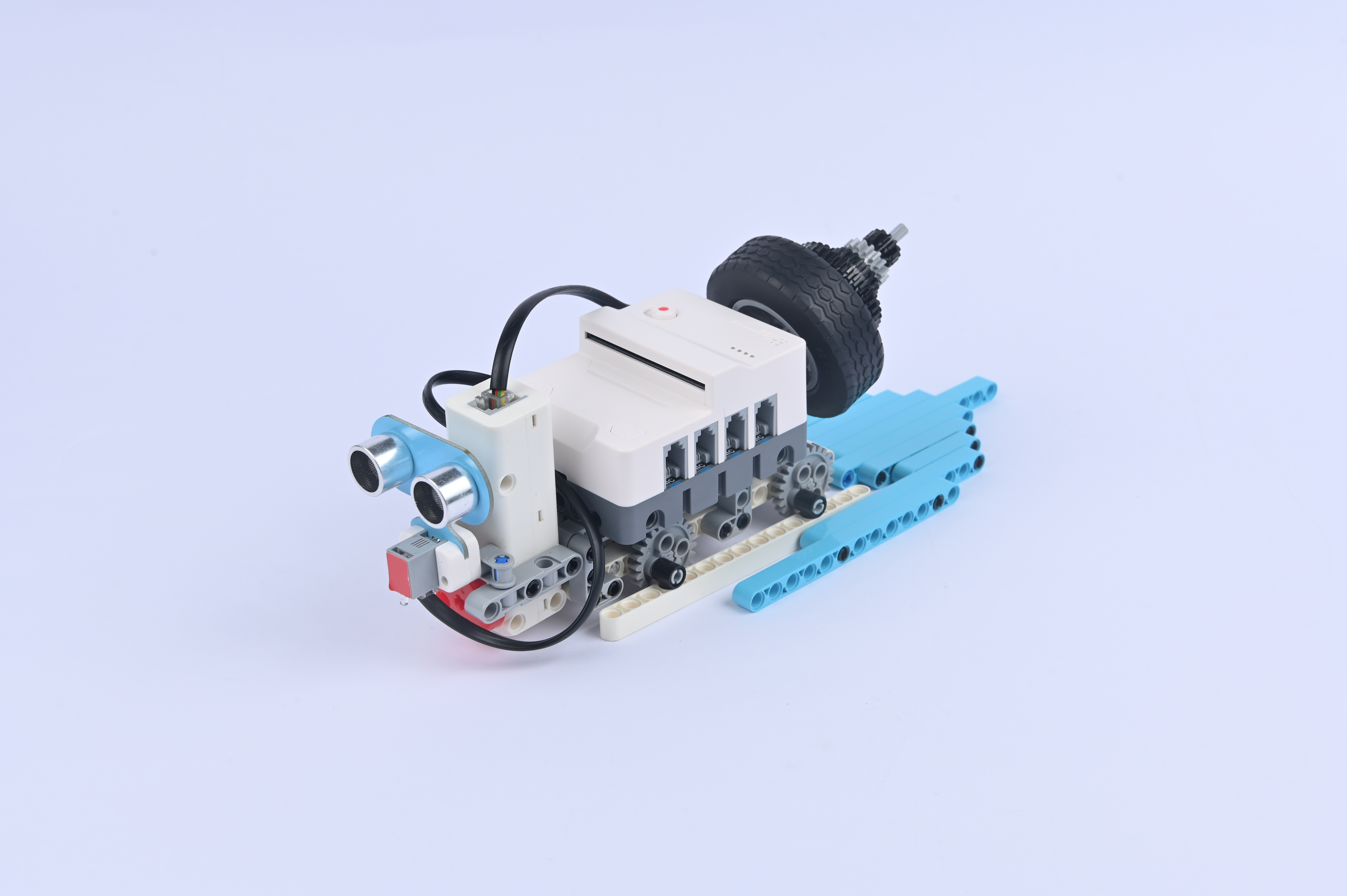
micro:bit 相关产品积木搭建哪吒pro海洋套件案例十:海螺本页总览海螺故事导入小恩还沉浸在螃蟹竞速的兴奋中,就被杰克拽到新场地。主持人宣布:“接下来是海螺爬行大赛,谁搭的海螺模型爬得最慢,谁就是冠军!” 杰克两眼放光,冲小恩挑眉:“瞧见没?搭海螺我可是行家!敢不敢和我一决高下?教学准备名称图示哪吒Pro海洋套件教学目标1.认识蜗轮蜗杆2.掌握逻辑运算积木块的使用。3.探究海洋动物的移动方式。学习探究1.你知道海螺是怎么移动的吗?2.为什么海螺是采用腹足爬行。搭建步骤硬件连接1号电机连接哪吒扩展板“M1”端口;超声波传感器连接哪吒拓展板“J1”端口。代码编程进入“makecode.microbit.org”,点击新建项目。在弹出窗口输入项目名称并点击创建。点击代码抽屉中的扩展。在弹出界面输入nezha pro并点击搜索图标,在显示nezha pro软件库后点击。同样的方式加载PlanetX软件库。示例程序程序链接 https://makecode.microbit.org/_hXXKfwCukXaK你也可以通过以下网页直接下载程序。下载程序使用 USB 线连接 PC 和 micro:bit V2。连接成功后,电脑上会识别出一个名为 MICROBIT 的盘符。点击左下角的,选择Connect Device。点击。点击。在弹出窗口选择 BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的 micro:bit 就已经连接成功。点击下载程序案例演示超声波传感器检测距离大>5CM,海螺停止移动,检测距离<5CM,海螺向前移动。扩展知识海螺为什么用腹足爬行海螺之所以主要依靠底部爬行,是由其生理结构、生存需求及进化适应共同决定的,具体原因如下:1. 生理结构决定运动方式海螺属于腹足纲软体动物,其最核心的运动器官是腹足—— 这是一个宽大、扁平的肌肉质足,位于身体腹面(底部)。腹足通过波浪状的肌肉收缩产生动力:肌肉从前端向后端依次收缩,带动身体缓慢向前移动,同时腹足会分泌黏液,减少与底部(如岩石、泥沙)的摩擦,让爬行更顺畅。 这种结构与昆虫的足、脊椎动物的四肢不同,无法支撑身体离开地面跳跃或奔跑,只能紧贴底部借助摩擦力移动,因此自然形成 “底部爬行” 的运动模式。2. 生存环境的适应海螺多栖息于潮间带、浅海海底或淡水水域的底部,周围环境以岩石、泥沙、珊瑚礁等为主。底部爬行能让它们更高效地: 获取食物: 海螺以底部的藻类、有机碎屑、微生物或小型无脊椎动物为食,贴近底部便于直接摄食附着在岩石或泥沙上的食物。 躲避天敌: 底部的缝隙、岩石下方或泥沙中是天然的隐蔽场所,爬行时能快速躲入其中,减少被捕食者(如鱼类、海鸟)发现的概率。 适应底质环境: 不同海螺对底质(如沙质、泥质、岩质)有特定偏好,底部爬行能让它们更好地附着在适应的底质上,避免被水流冲走。3. 能量消耗与生存策略海螺的代谢速率较低,能量储备有限,底部爬行是一种节能的运动方式。相比游泳或跳跃,爬行所需的能量更少,能让它们在食物获取不稳定的环境中更高效地分配能量,专注于生长和繁殖。 此外,多数海螺外壳厚重,重心较低,底部爬行能保持身体平衡,避免因外壳重量导致倾倒,这也是长期进化中形成的稳定生存策略。综上,海螺的底部爬行是其生理结构、栖息环境及能量利用等多方面因素共同作用的结果,是对自然环境的高效适应。