XGO-Rider 双轮足机器人套装-CM4 版
产品简介
CM4 XGO-Rider 是一款基于树莓派的桌面级双轮足开发平台,内置树莓派 CM4 模组,实现 AI 边缘计算应用,采用 4.5KG.CM 全金属磁编码总线串口舵机作为关节,FOC 轮毂一体化电机作为轮子,内部搭载惯性测量单元(IMU),能够根据不同地形反馈,实时调整关节角度实现全向移动、姿态稳定、多种运动叠加等动作。支持 Python 编程和 ROS 编程,支持无线遥控、人脸识别、手势识别、颜色追踪、物体检测、车牌识别、二维码运动控制等一系列智能功能。集成讯飞星火大模型,支持语音对话交流、文生图、图生文等多种 AI 功能。提供系统且丰富的学习教程,帮助您快速入门双轮足机器人智能控制。

产品特性
集成 AIGC 能力:内置树莓派 CM4 模组,实现 AI 边缘计算应用,实现人脸识别、语音对话、文生图、图生文、手势识别、颜色追踪、物体检测等等智能功能。
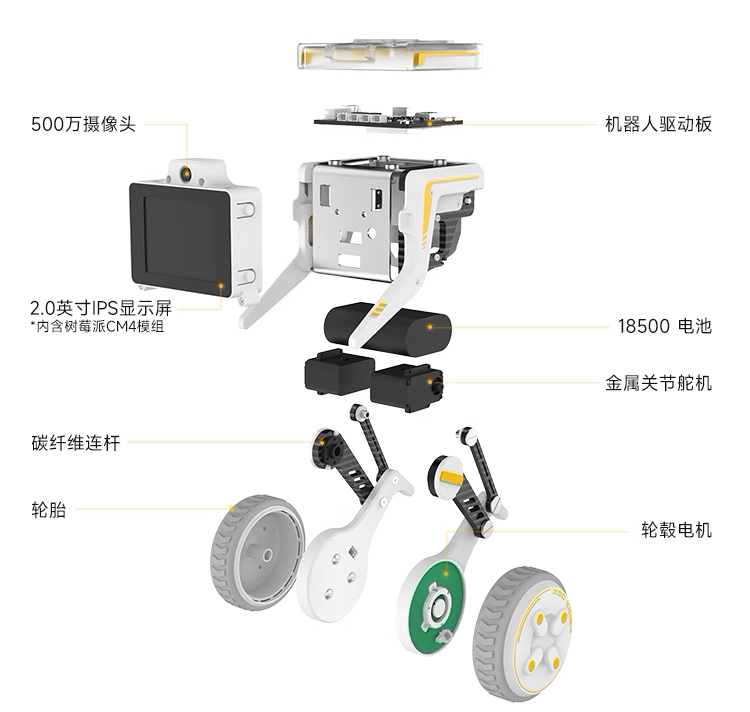
体积小巧、性能强大:XGO Rider 配备 FOC 轮毂一体化电机和 4.5KG.CM 全金属磁编码总线串口舵机,实现敏捷、稳定、全向的运动,确保强大的动力和精确控制。
自适应地形:内置六轴惯性测量单元(IMU),根据IMU反馈的位置调整关节角度实时适应各种地形障碍。
易于编程与遥控:支持 Python 和 ROS 编程,通过 XGO 手机 APP 实现蓝牙遥控和图形化编程,方便用户进行二次开发和控制。
丰富的学习资源:提供系统且丰富的学习教程,帮助用户快速入门双轮足机器人智能控制。
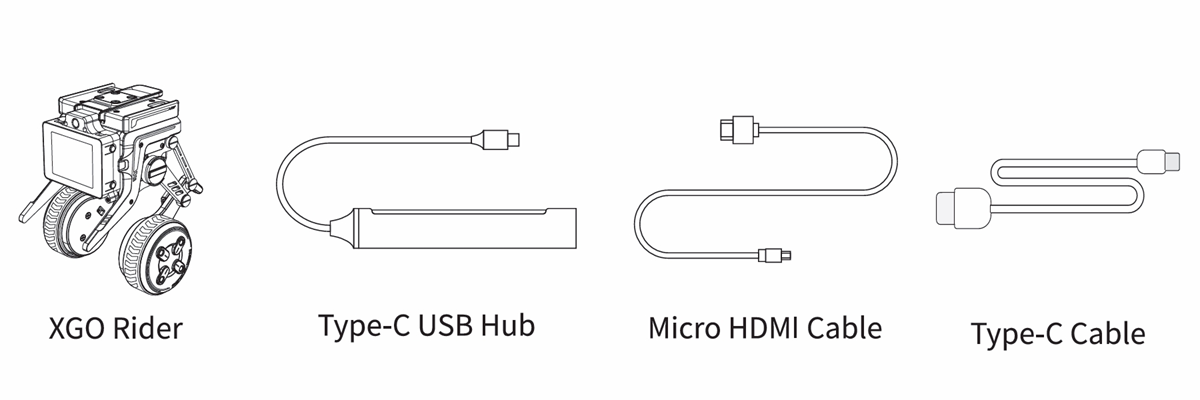
产品清单
规格参数
XGO-Rider 双轮足机器人套装-CM4 版 产品参数
| 产品名称 | XGO-Rider 双轮足机器人套装-CM4 版 |
|---|---|
| SKU | EF08418 |
| 包装尺寸 | 202 mm × 150 mm × 146 mm |
| 产品重量 | 720 g |
| 电子模块数量 | 2个 |
| 电子模块 | XGO-Rider 整机、树莓派 CM4 模组 |
| 适用年龄 | 10+ |
| 案例数量 | 15+ |
| 编程方式 | ROS 编程、Python 代码编程、XGO APP 蓝牙遥控 |
XGO-Rider 机身参数
| 产品名称 | XGO-Rider |
|---|---|
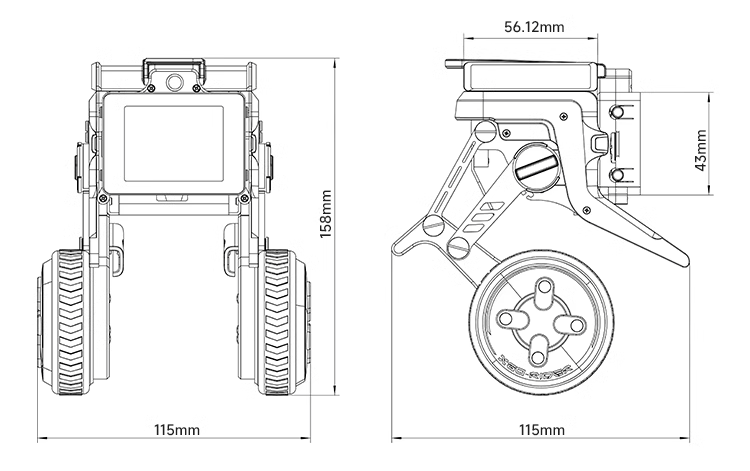
| 整机尺寸 | 长 135mm 宽 118 mm 高 116-158mm |
| 整机重量 | 560g |
| 结构件 | 1mm 铝合金,PC,碳纤维 |
| 关节舵机 | 6V 4.5KG.CM 金属壳钢齿 360 度磁编码双轴 TTL 串口舵机 |
| 轮毂电机 | 8.4V 磁编码外转子无刷电机,额定扭矩 0.1N.m |
| 下位机 | ESP32-WROVER-B 模组,具有 WiFi 和蓝牙功能,Type-C 充电口,拨动开关等 |
| 电池 | 18500 2S 1400 毫安 |
| 扬声器 | 8 欧 3W 腔体扬声器 |
| 续航时间 | 综合工况 2 小时 |
AI 模组参数
| 控制器 | Raspberry Pi CM4 |
|---|---|
| 屏幕 | 2.0英寸 IPS 320 ×240 |
| 摄像头 | 500万像素 OV5647 |
| 麦克风 | 双 MEMS 数字麦克风 |
| 视频编解码 | 支持H.265 (HEVC) (最高支持4Kp60解码), H.264 (最高支持1080p60解码, 1080p30编码) |
| 接口 | Micro Hdmi视频输出接口、Type-C USB接口、PH2.0 4PIN串口通信及电源接口 |
| 按键 | 4个可编程按键 |
舵机参数
| 舵机类型 | 串行总线舵机 |
|---|---|
| 材质 | 外壳为铝合金材质,齿轮为 7075 铝镀钛材质 |
| 额定扭矩 | 4.5 KG.CM |
| 速度(S/60°) | 0.08 S/60° |
| 工作电压范围 | 4.8V ~7.4V |
| 工作温度 | -10°C ~ +50°C |
| 重量 | 25g |
| 电机类型 | 空心杯电机 |
电机参数
| 电机类型 | 无刷电机 |
|---|---|
| 电压 | 8.4 V |
| 额定电流 | 940 mA |
| 额定扭矩 | 0.13 N.m |
| 空载转速 | 400 RPM |
| KV 值 | 75 |
| 尺寸 | 长度 48mm,高度20mm |
| 重量 | 130g |
产品尺寸
产品结构
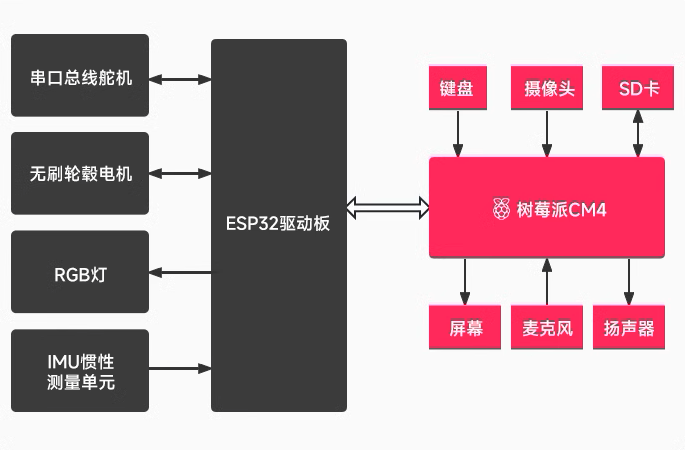
系统架构
快速入门
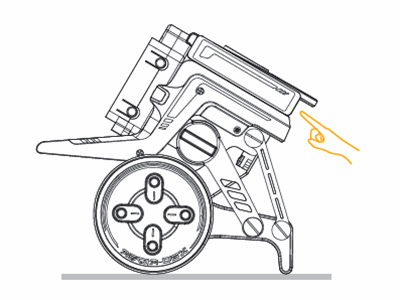
开机
请将 XGO Rider 以后仰姿态放置在 地面! 地面!地面!上,然后打开电源开关,XGO Rider 会弹起并保持平衡状态。
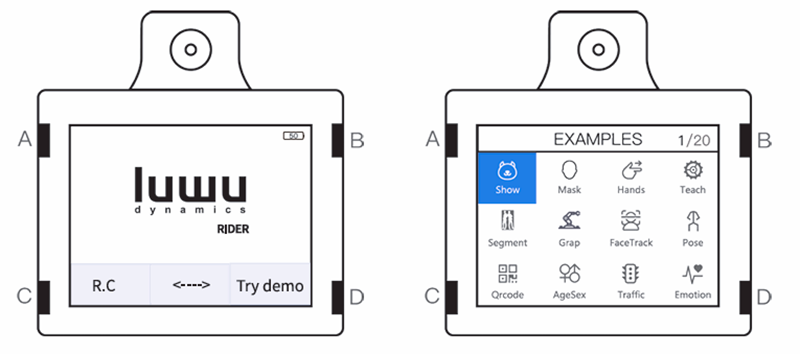
示例模式
开启电源后,按"A"或"B"选择"示例模式",然后分别使用"A"和"B"上下滚动选择所需的应用程序,然后按"D"确认并执行所选操作,按"C"返回上一个菜单。
根据CM4镜像不同,页面信息可能与当前图片不一致
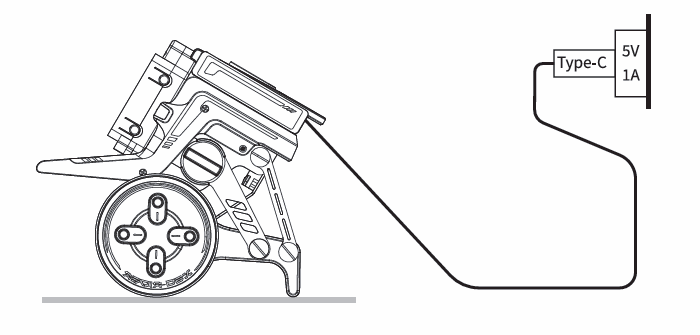
充电
在关机状态下使用随机的Type-C充电线插上任意5V充电头充电,充电过程中红色灯亮起,充满电绿色灯亮起。
注意事项
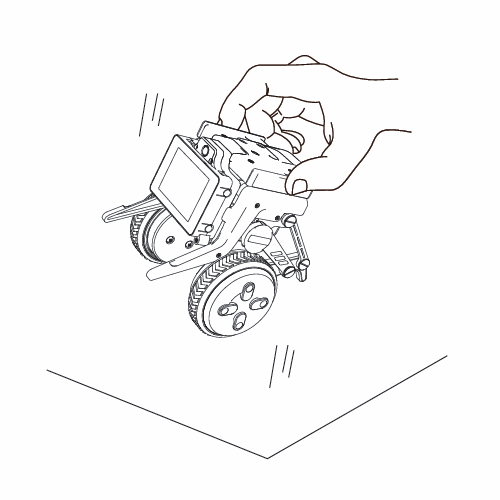
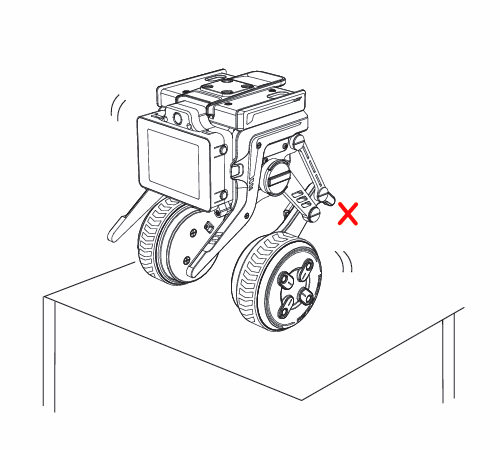
XGO Rider 开机后,为保持机身平衡,需要小幅度来回移动,请不要将 XGO Rider 放在桌子边缘或者危险的地方,避免损坏。
请将 XGO Rider 以后仰姿态放置在 地面! 地面!地面!上,然后打开电源开关,XGO Rider 会弹起并保持平衡状态。
开机状态下,如果XGO Rider被拿起,则会进入锁定状态,此时将XGO Rider垂直放置在地面上,几秒后会恢复正常。