软件库说明文档
| 积木块类别 | 积木块图示 | 参数 | 积木块功能说明 |
|---|---|---|---|
| 行驶控制 |  | 参数1类型:整型 参数范围:-100~100 参数2类型:整型 参数范围:-100~100 | 分别设置左轮和右轮的速度 |
 | 参数1类型:下拉选项 可选项:前进、后退、左转、右转 参数2类型:整型 参数范围:-100~100 参数3类型:整型 参数范围:自然数 | 设置小车的行驶方向、速度和持续时间 | |
 | 参数1类型:下拉选项 可选项:前进、后退、左转、右转 参数2类型:整型 参数范围:-100~100 | 设置小车的行驶方向、速度 | |
 | 设置小车立刻停车 | ||
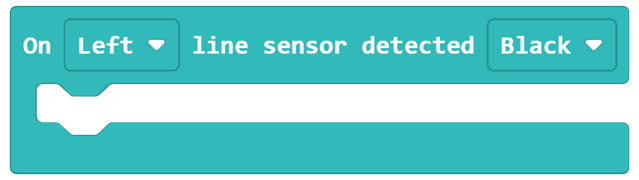
| 巡线传感器 |  | 参数1类型:下拉选项 可选项:左侧、右侧 参数2类型:下拉选项 可选项:黑色、白色 | 单独判断小车左侧或右侧的巡线头状态 |
 | 参数1类型:下拉选项 可选项:●●,○●,●○,○○ | 判断小车的巡线头状态 | |
 | 参数1类型:下拉选项 可选项:左侧、右侧 参数2类型:下拉选项 可选项:黑色、白色 | 单独判断小车左侧或右侧的巡线头状态 | |
| 超声波传感器 |  | 参数1类型:下拉选项 可选项:厘米、英寸 | 获取超声波传感器的返回值 |
 | 参数1类型:下拉选项 可选项:<,> 参数2类型:整型 参数范围:自然数 | 获取超声波传感器的返回值 | |
| 灯光控制 |  | 参数1类型:下拉选项 可选项:  | 设置车头灯的颜色为预设颜色 |
 | 参数1类型:整型 参数范围:0~255,参数2类型:整型 参数范围:0~255,参数3类型:整型 参数范围:0~255 | 设置车头灯的颜色 | |
 | 关闭车头灯 | ||
| 舵机控制 |  | 参数1类型:下拉选项 可选项:180°,360° 参数2类型:下拉选项 可选项:S1,S2,S3,S4 参数3类型:整型 参数范围:0~360 | 控制舵机的转动角度 |
 | 参数1类型:下拉选项 可选项:S1,S2,S3,S4 参数2类型:整型 参数范围:-100~100 | 控制连续旋转舵机的速度 | |
| PID控制 |  | 参数1类型:整型 参数范围:20~50 参数2类型:下拉选项 可选项:厘米/秒,英寸/秒 | 控制小车的行驶速度 |
 | 参数1类型:整型 参数范围:20~50 参数2类型:整型 参数范围:20~50 参数3类型:下拉选项 可选项:厘米/秒,英寸/秒 | 分别设置两小车两个轮子的转动速度 | |
 | 参数1类型:下拉选项 可选项:前方,后方 参数2类型:整型 参数范围:自然数 参数3类型:下拉选项 可选项:厘米,英寸 | 控制小车的行驶方向和距离 | |
 | 参数1类型:下拉选项 可选项:左转,右转,原地左转,原地右转 参数2类型:整型 参数范围:0~360 | 控制小车的转向方式和转向角度 | |
 | 参数1类型:整型 参数范围:自然数 参数2类型:下拉选项 可选项:厘米,英寸 | 初始化方格的尺寸 | |
 | 参数1类型:整型 参数范围:自然数 | 控制小车的行驶指定方格数量 |