Simple mechanical gripper trolley
Purpose
Build a Cutebot Pro cart that uses a mechanical claw.

Material Requested
Cutebot ProSmart Cutebot Pro Car
ELECFREAKS Mechanical Catch (Use With Cutebot)
ELECFREAKS micro:bit Electronic Joystick:bit V2 Kit
Assembly Steps


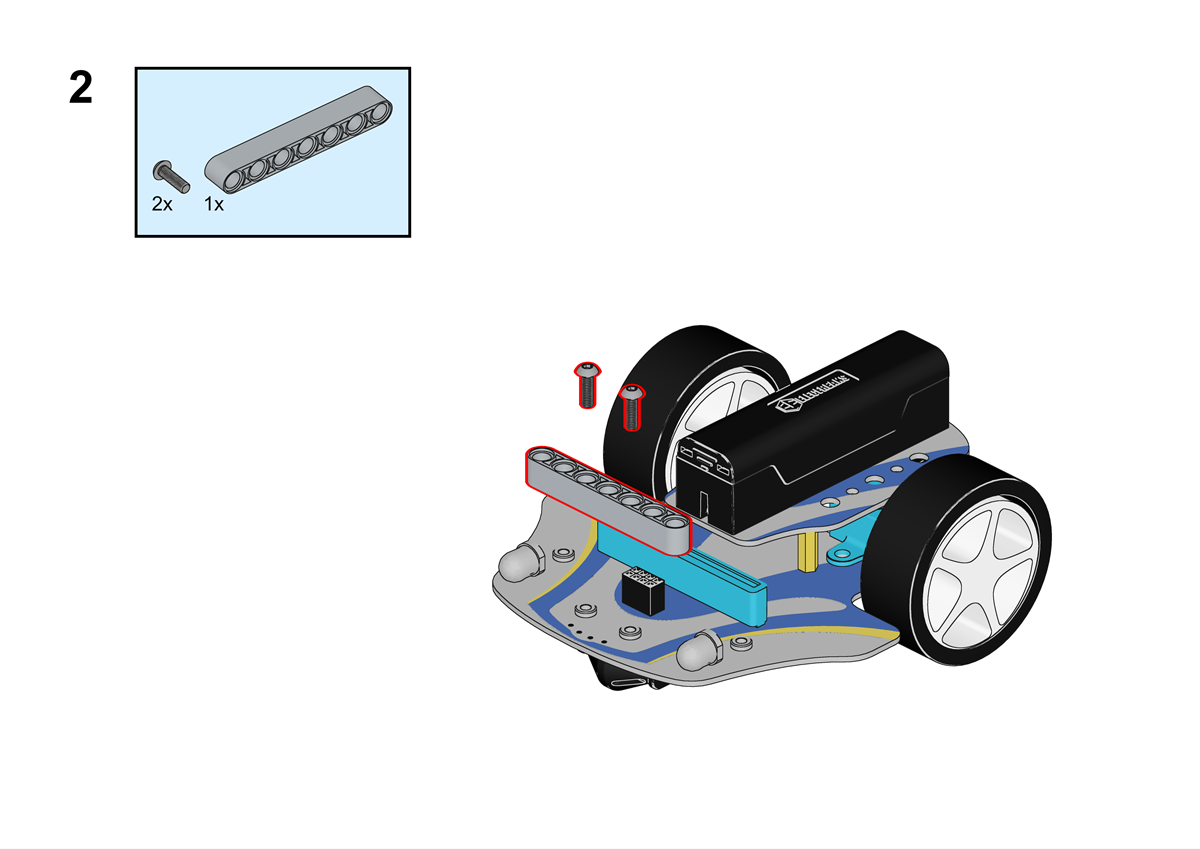
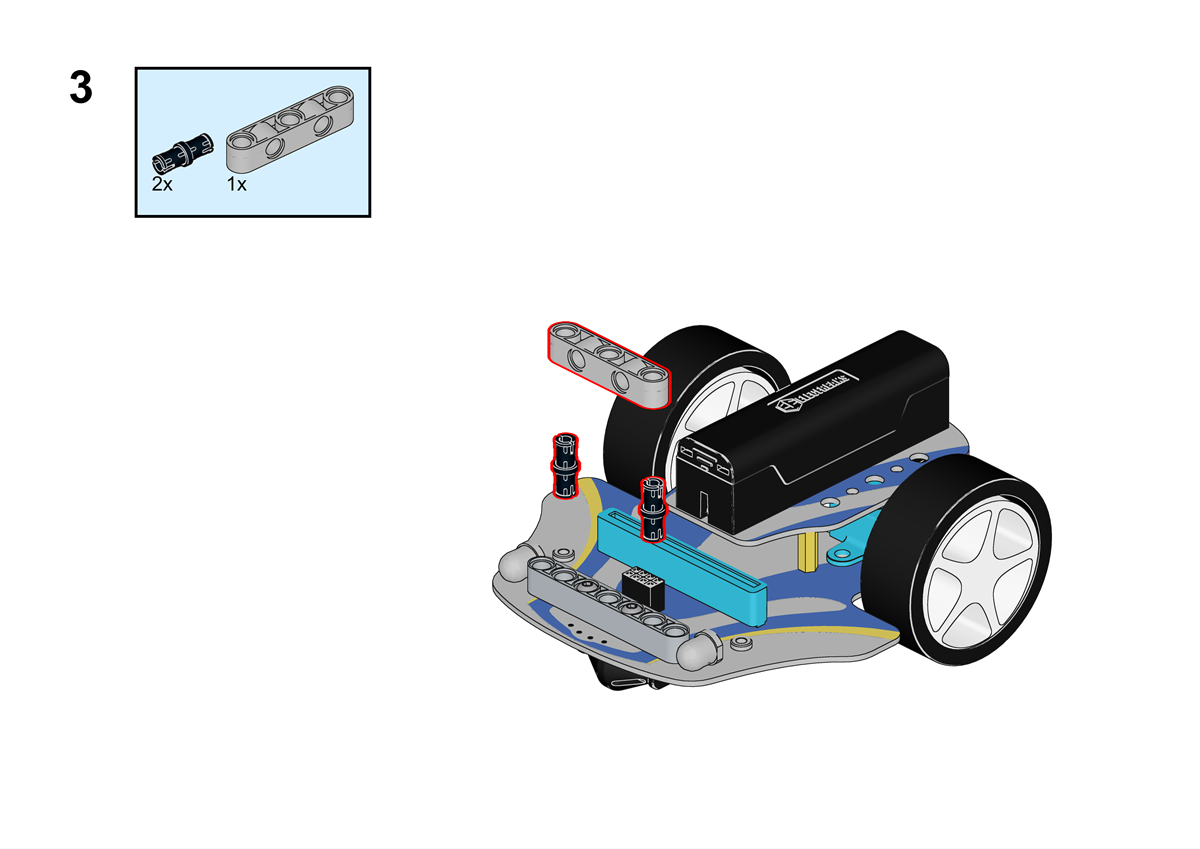




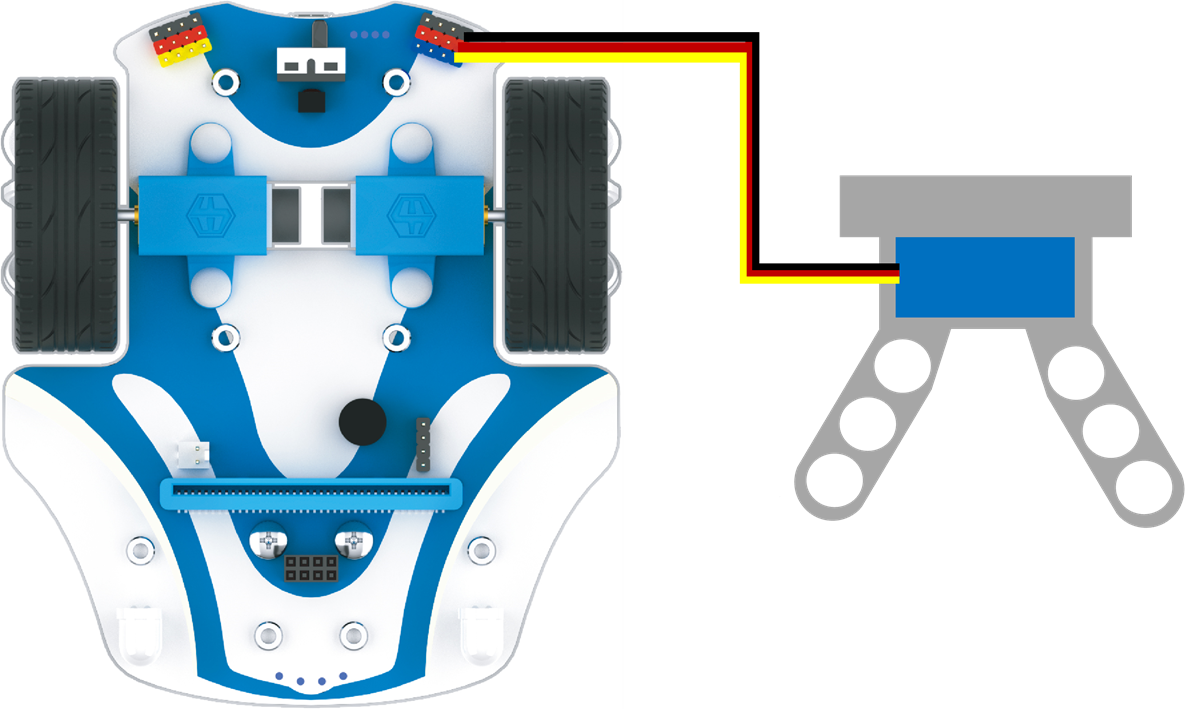
Hardware Connection
Connect the Simple Mechanical Jaw to the S1 port on the Cutebot Pro cart.
Software
Program
Click Advanced in MakeCode's code drawer to see more code options.

In order to program the Cutebot Pro car, we need to add an extension library. Find Extensions at the bottom of the code drawer and click on it. This will bring up a dialog box to search for CutebotPro and click to download this code library.

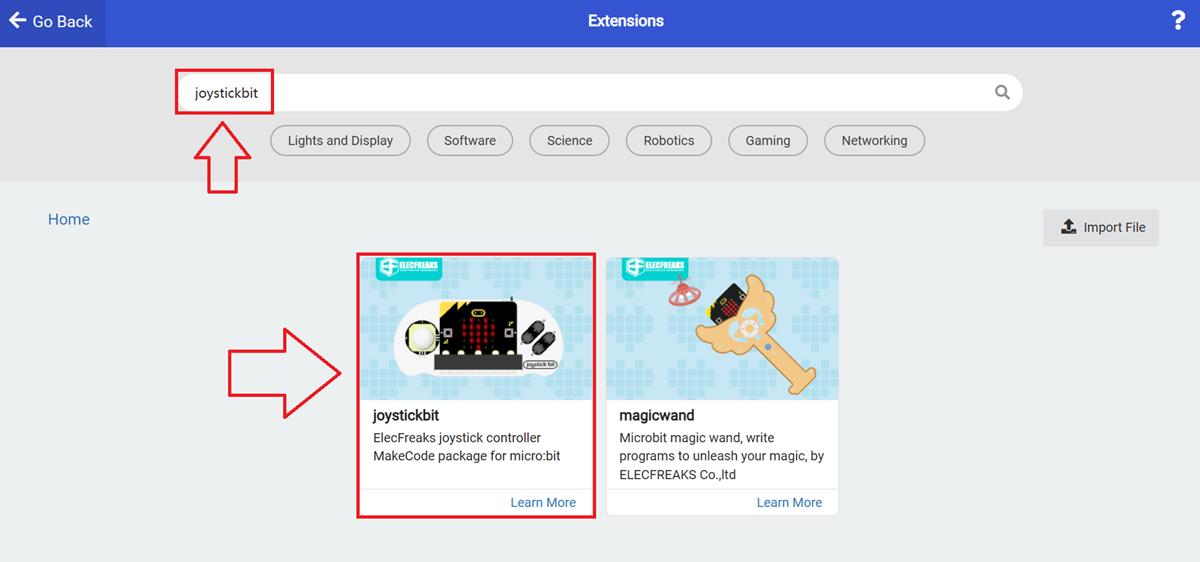
In order to program the joystick:bit V2, we need to add an extension library. Find Extensions at the bottom of the code drawer and click on it. This will bring up a dialog box to search for joystickbit and click on Download this codebase.
Sample Program
Joystick side

Programs
Please refer to the program link:https://makecode.microbit.org/_gd9TXcWo3Pfh
You can also download the program directly from the following page.
Cutebot pro car said

Programs
Please refer to the program link:https://makecode.microbit.org/_MvJRATTKuidu
You can also download the program directly from the following page.
Conclude
Through the handle rocker to control the trolley traveling route, press the handle button C can control the trolley mechanical claw to clamp the items, release the button C then the mechanical claw to release the items.

Expanding Knowledge
Application scenarios of remote-controlled mechanical claw carts
Remote control mechanical claw trolley is a kind of unmanned vehicle equipped with mechanical claw, which can be operated by remote control to move and control the action of mechanical claw. The following are some application scenarios of remote-controlled mechanical claw carts:
Logistics and warehousing: Remote-controlled gripper trolleys can be used in logistics and warehousing fields for handling and stacking goods. The operator can control the movement of the trolley through the remote control and use the mechanical claw to grab, carry or stack the goods to improve logistics efficiency and reduce labor costs.
Search and Rescue: In disaster rescue or search and rescue missions, the remote-controlled mechanical claw trolley can be used to carry and operate rescue tools. It can reach hard-to-reach areas through narrow or dangerous terrain and use the mechanical claw for tasks such as item handling, obstacle removal or personnel rescue.
Environmental monitoring and cleaning: The remote-controlled mechanical claw cart can be used for environmental monitoring and cleaning tasks. It can carry sensor devices, such as cameras or gas sensors, for environmental data collection and monitoring. At the same time, the mechanical claw can be used to remove garbage, pick up debris or carry out cleaning work to improve environmental tidiness and sustainable development.
Building and construction: In the field of building and construction, the remote-controlled mechanical claw trolley can be used for carrying and placing building materials, such as bricks and steel bars. It can transport materials to designated locations through narrow construction spaces and place them accurately using a mechanical claw, improving construction efficiency and reducing manual labor.
Agriculture and horticulture: The remote-controlled mechanical claw trolley has application potential in agriculture and horticulture. It can be used for agricultural operations such as sowing, harvesting, weeding or fertilizing. The gripper can grab and handle crops, while the cart's mobility can be adapted to different agricultural or horticultural sites.