Case 08: A Big Beetle
Purpose
Make a big beetle with NezhaA Inventor's Kit.

Purchse
Materials Required

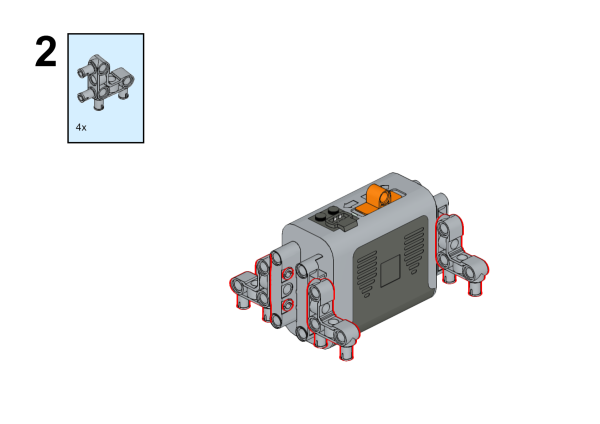
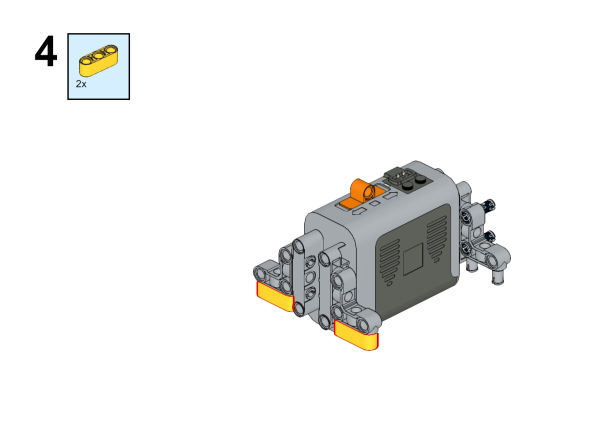
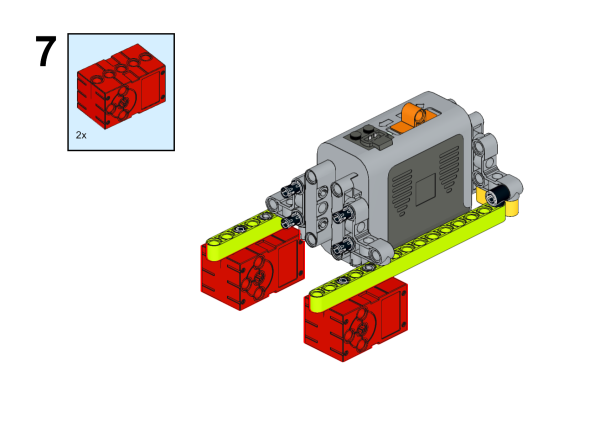
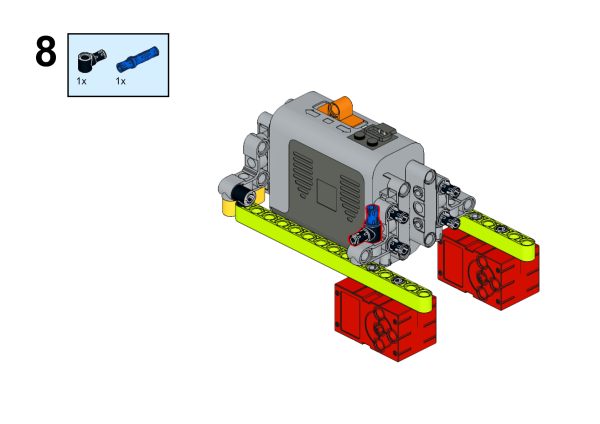
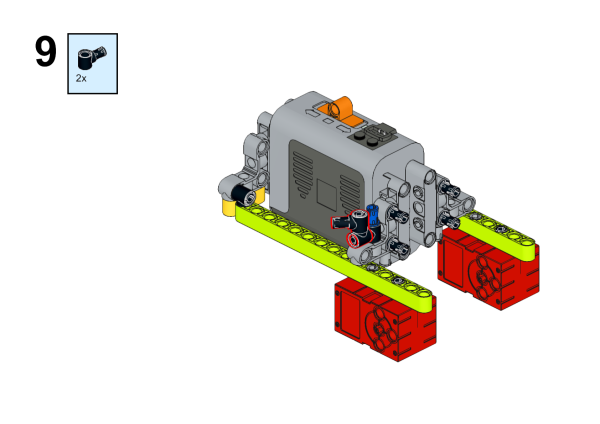
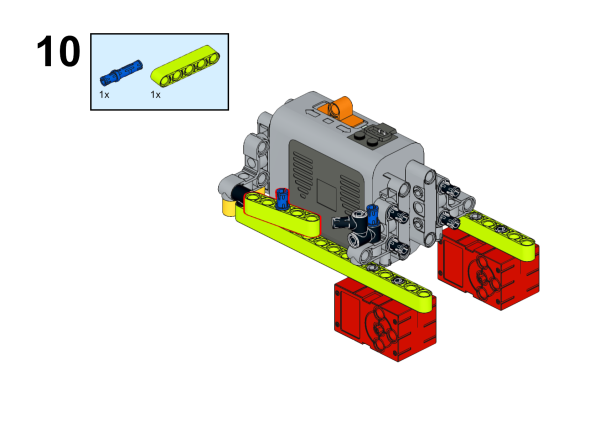
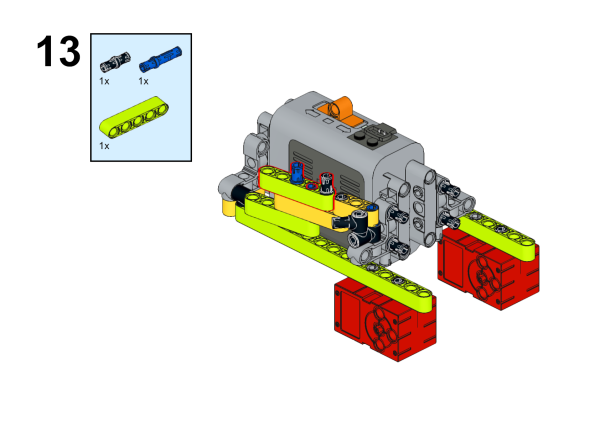
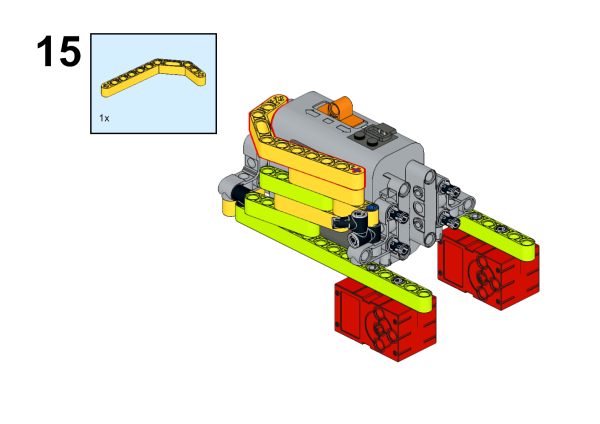
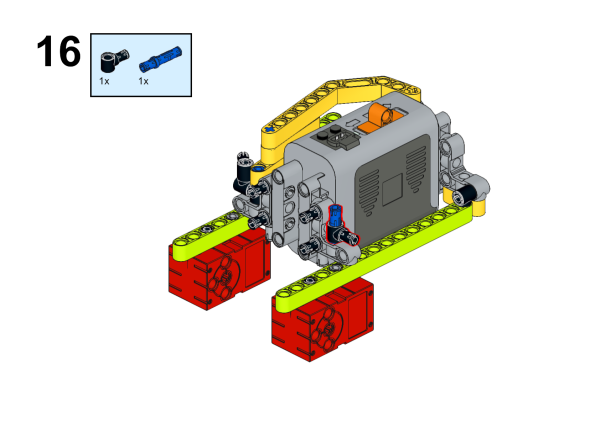
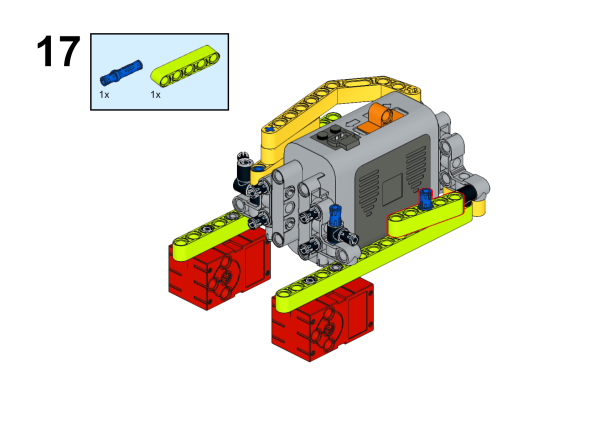
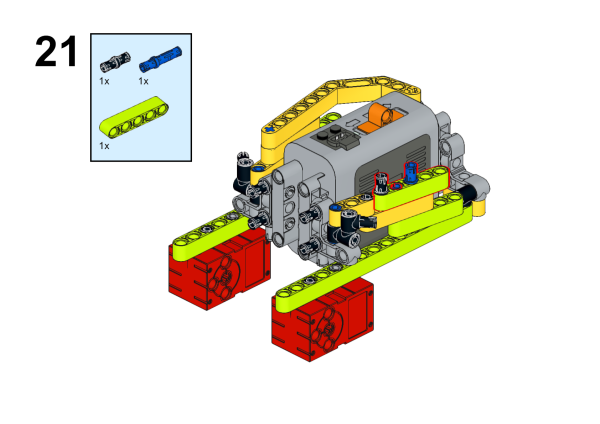
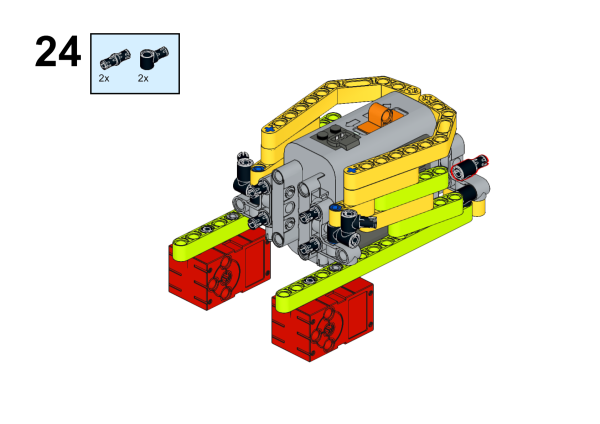
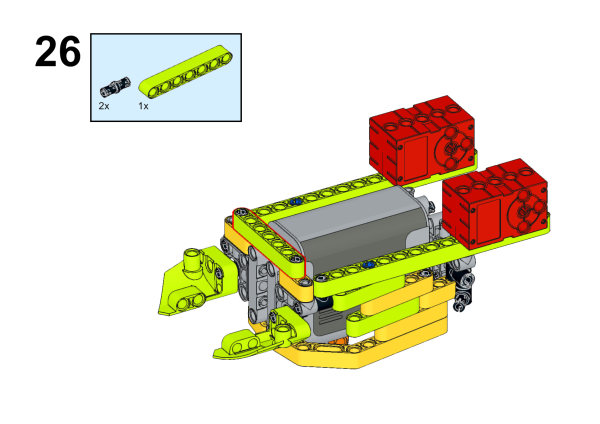
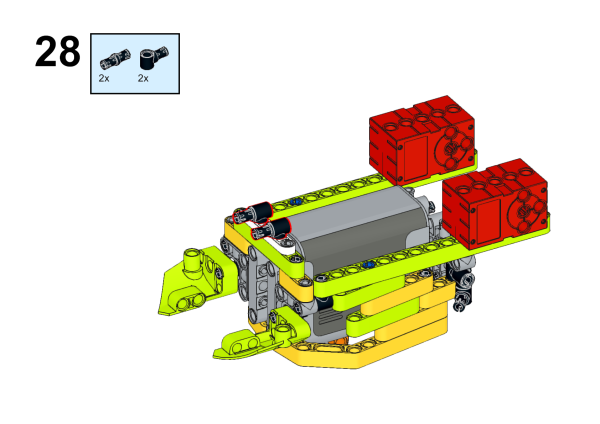
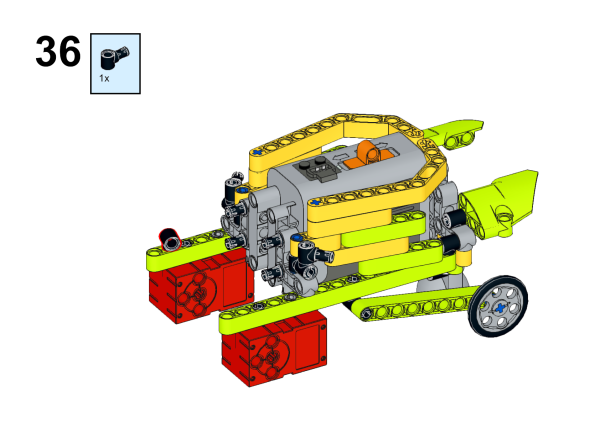
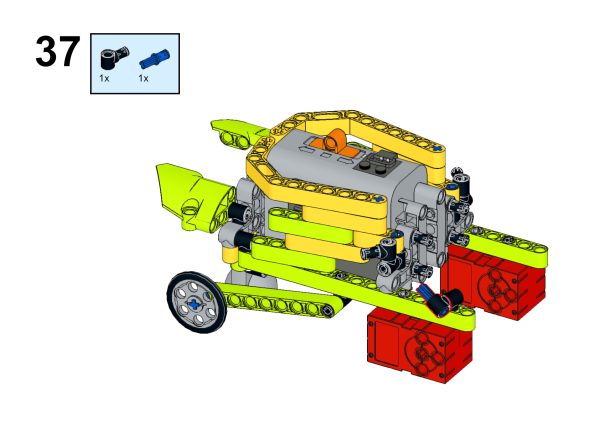
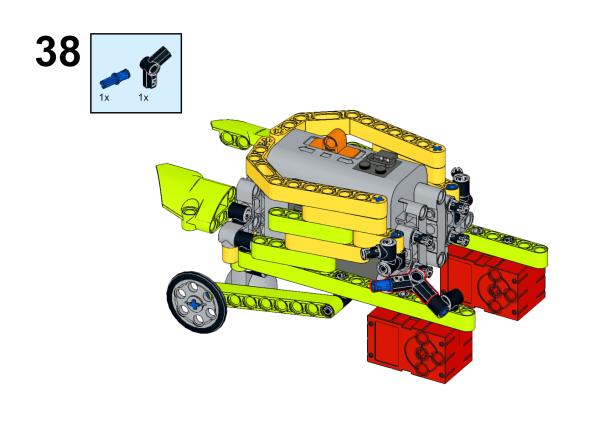
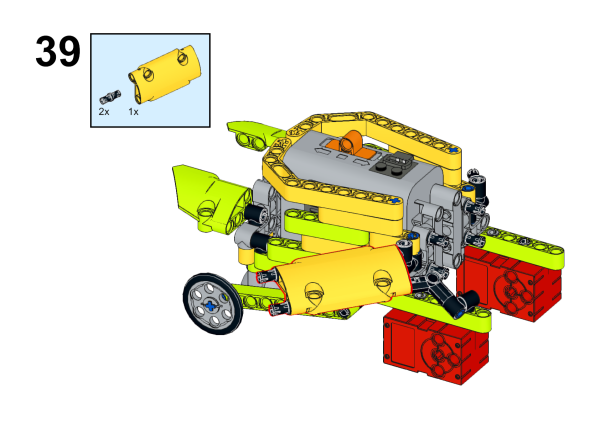
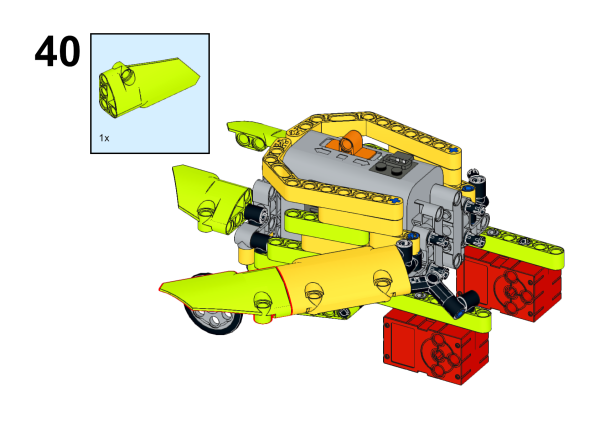
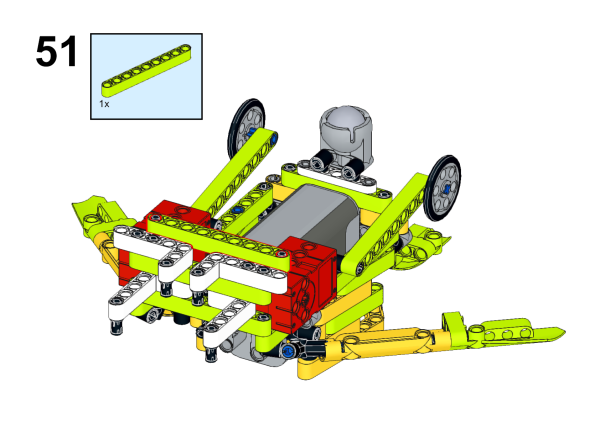
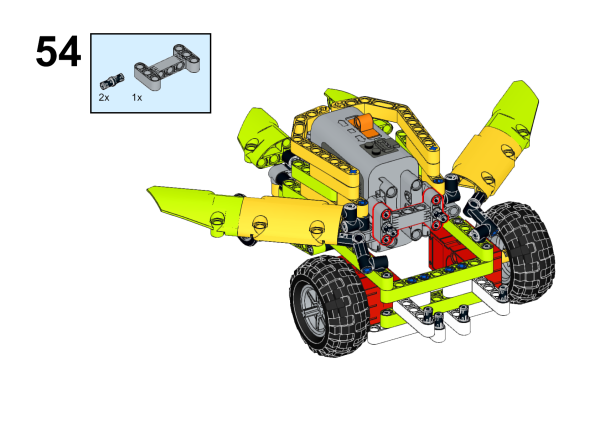
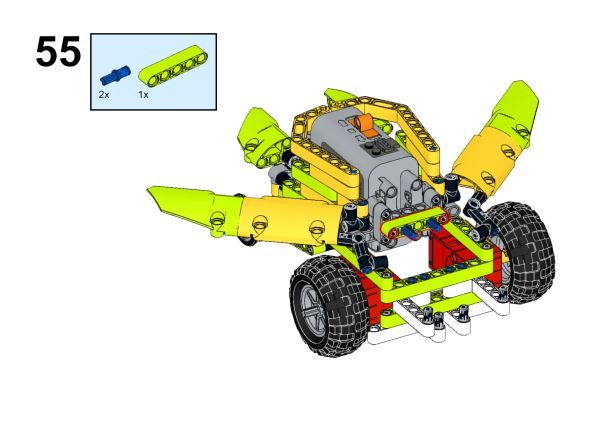
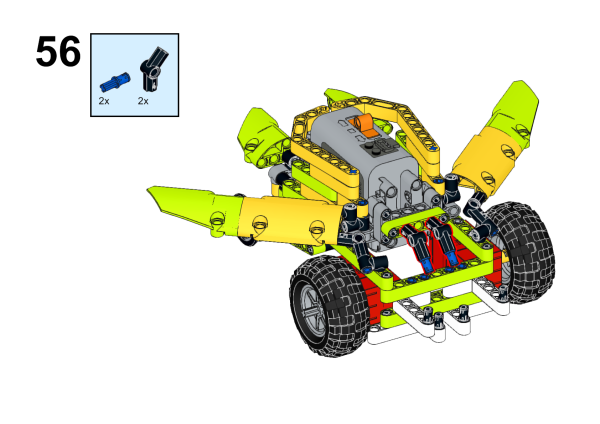
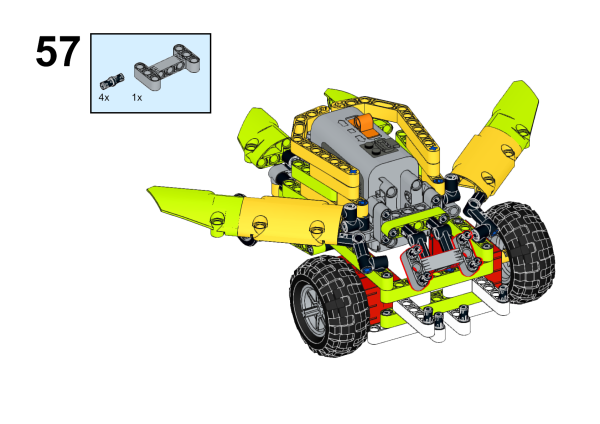
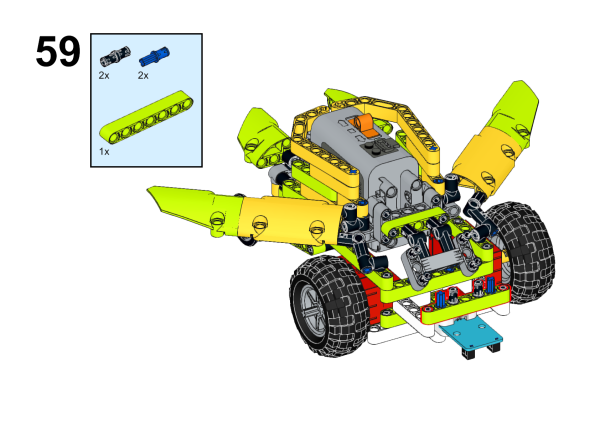
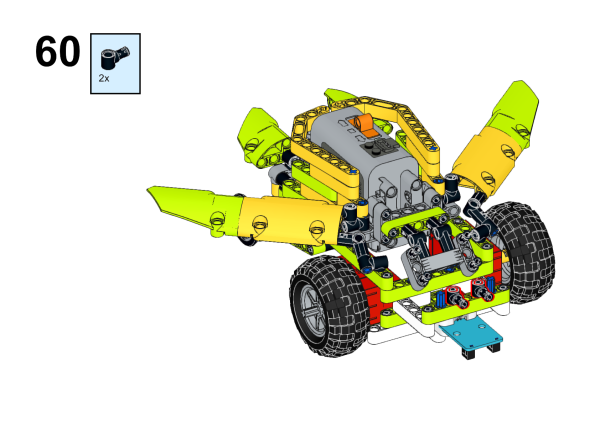
Assembly Steps
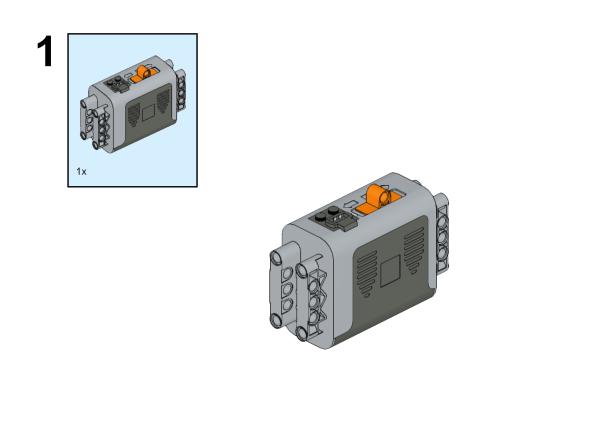



































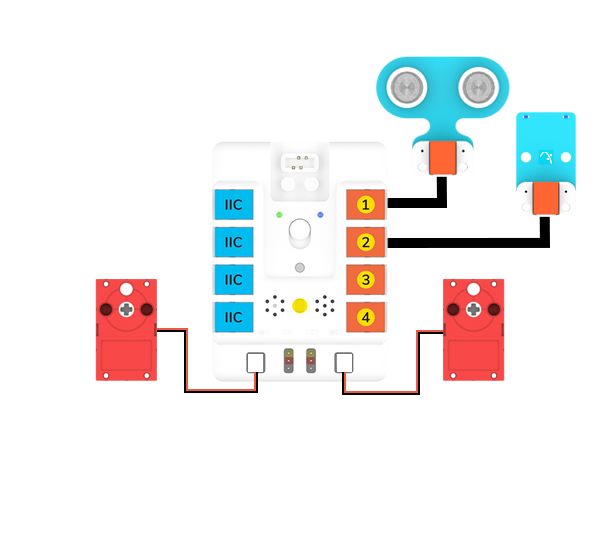
Hardware Connections
Connect two motors to M1 and M2 port, the ultrasonic sound sensor to J1 port and the line-tracking sensor on J2 port on Nezha-A master box.
Programming
Prepare the programming
Steps for preparation please refer to: Arduino 3 in 1 Breakout Board
Import the libraries and the subsidiary libraries of Nezha-A master box and then import the libraries of the line-tracking sensor: PlanetXTracking-main.zip
Import the libraries and the subsidiary libraries of Nezha-A master box and then import the libraries of the ultrasonic sound sensor: PlanetXUltrasonic-main.zip Download and import the self-defined library connections for Nezha-A master box: RJPins-main.zip
Sample Code:
// Language ArduinoC
#include <NezhaA.h>
#include <RJPins.h>
#include <PlanetXTracking.h>
#include <PlanetXUltrasonic.h>
PlanetXTracking trackingJ2(J2); //Create an instance of PlanetXTracking category
NezhaA nezhaa; //Create an instance of Nezha category
PlanetXUltrasonic ultrasonicJ1(J1); // Create an instance of PlanetXUltrasonic category
int distance; //Create a variable of int distance
void setup() {
nezhaa.begin(); //Initiliaze the buzzer, motor, servo and light
}
void loop() {
distance = (ultrasonicJ1.getDistance()); //Set the detected value from ultrasonic sound sensor as the variable distance
if (distance > 3 && distance < 20) { //Judge if the variable is over 3 and below 20
nezhaa.setMotorSpeed(M1, 0); //Set the speed of the motor connecting to M1 at 0%
nezhaa.setMotorSpeed(M2, 0); //Set the speed of the motor connecting to M2 at 0%
}
else {
if (trackingJ2.isTracked(Right)) {
nezhaa.setMotorSpeed(M1, 0); //Set the speed of the motor connecting to M1 at 0%
nezhaa.setMotorSpeed(M2, 20); //Set the speed of the motor connecting to M2 at 20%
}
if (trackingJ2.isTracked(Left)) {
nezhaa.setMotorSpeed(M1, 20); //Set the speed of the motor connecting to M1 at 20%
nezhaa.setMotorSpeed(M2, 0); //Set the speed of the motor connecting to M2 at 0%
}
}
}
Result
After powering on, the beetle walks along with the line and it stops while it detects the obstacles.