案例03 登月探测器
简介
本课程旨在向学生介绍登月探测器的组成部分以及在入月滑行轨道运行相关的知识。学生将使用 micro:bit 太空科创套装学习如何编写程序来控制登月探测器的运行。

教学目标
- 了解登月探测器的结构和运行方式。
- 了解登月探测器的运动轨迹知识。
- 学习登月探测器的搭建方式和编程控制。
教学准备
在开始教学之前,请确保您已经准备好以下必要的材料:
 | micro:bit V2 |
|---|---|
 | 哪吒多功能扩展盒V2 |
 | 行星系列智能积木马达 |
 | 行星超声波传感器 |
 | 行星双路巡线传感器 |
 | 积木包 |
 | USB 数据线 |
 | 个人电脑(PC) |
这些材料将为您提供一个完整的体验,确保您可以顺利地进行后续的操作和学习。如果您已准备好以上内容,我们可以继续进入下一步。
教学过程
课程引入
你们是否思考过登月探测器的组成以及运作方式呢?在本节课中,我们将一起探索如何通过积木结构件搭建登月探测器以及通过图形化程序控制登月探测器的运行。
准备好使用 micro:bit 太空科创套装探索太空旅行的世界了吗?现在,让我们踏上这个有趣的学习旅程吧!
探究活动
- 如何搭建登月登月探测器?
- 如果编写一个简单的程序,使登月探测器运行?
- 登月探测器如何规避太空的陨石碎片?
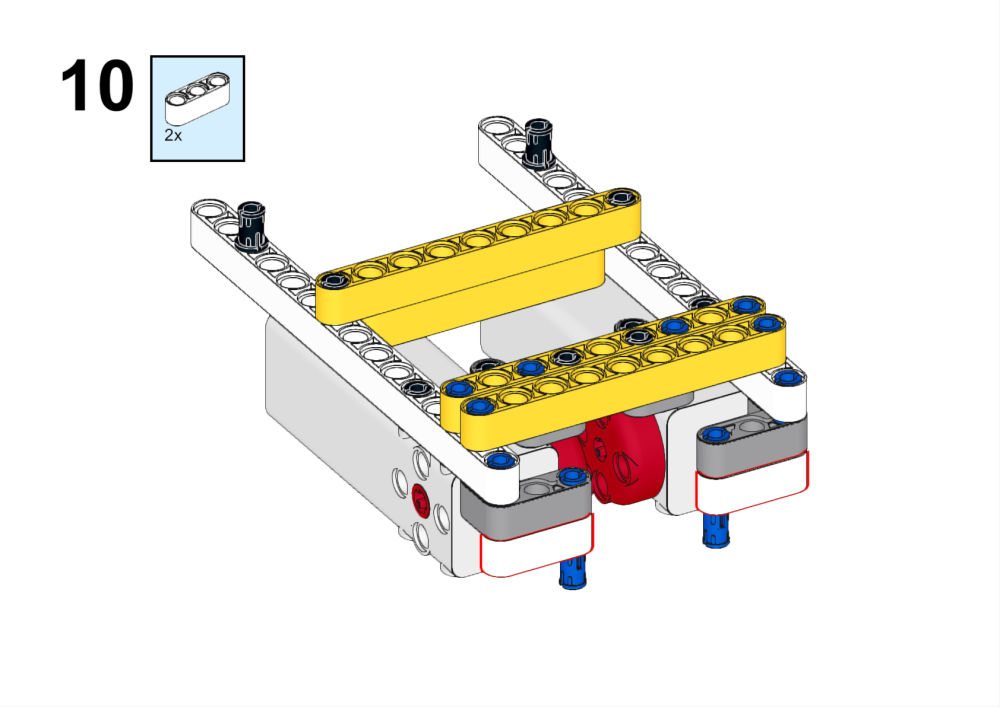
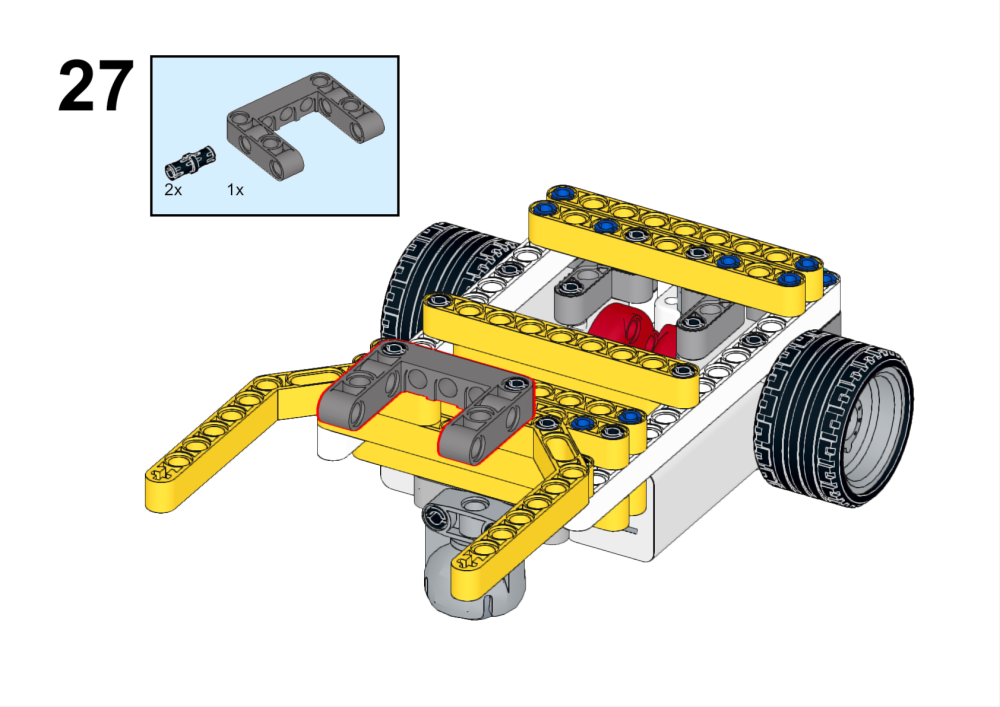
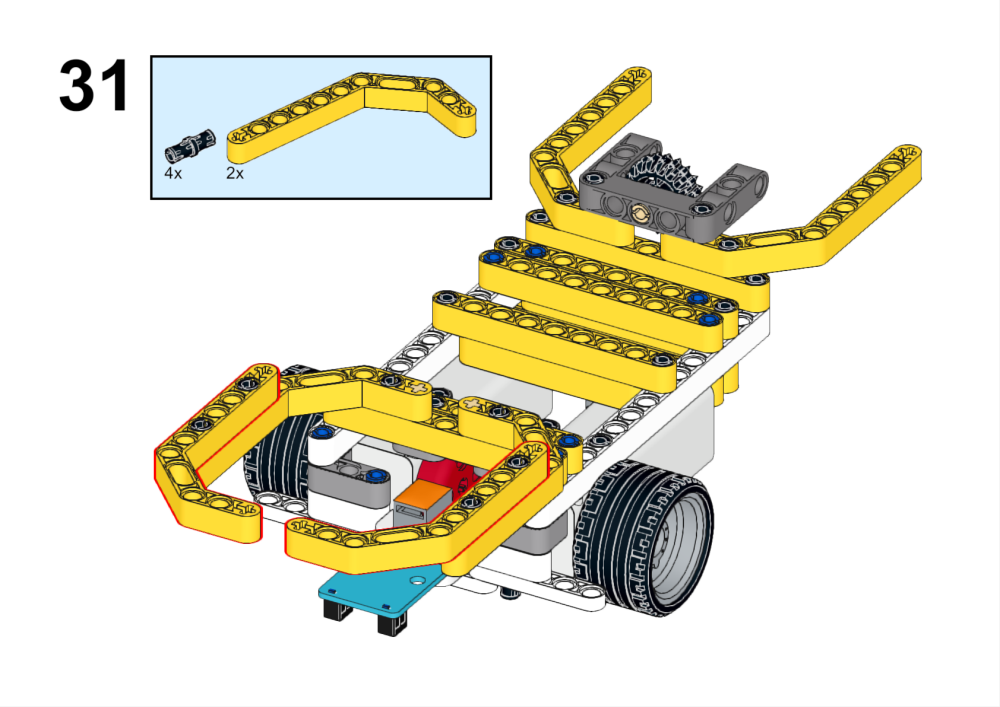
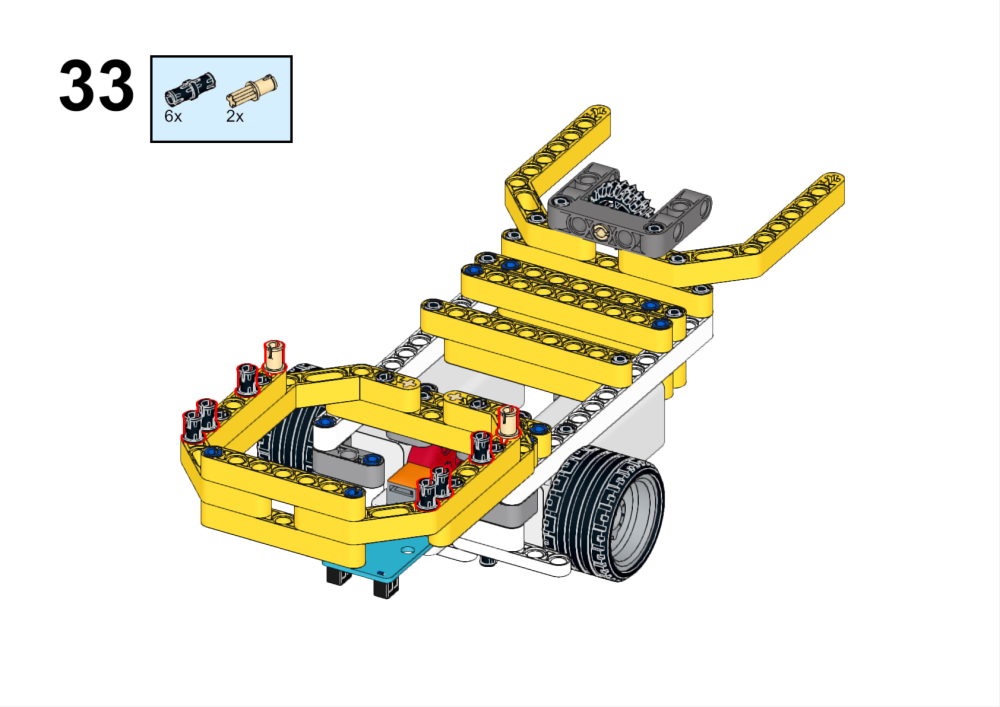
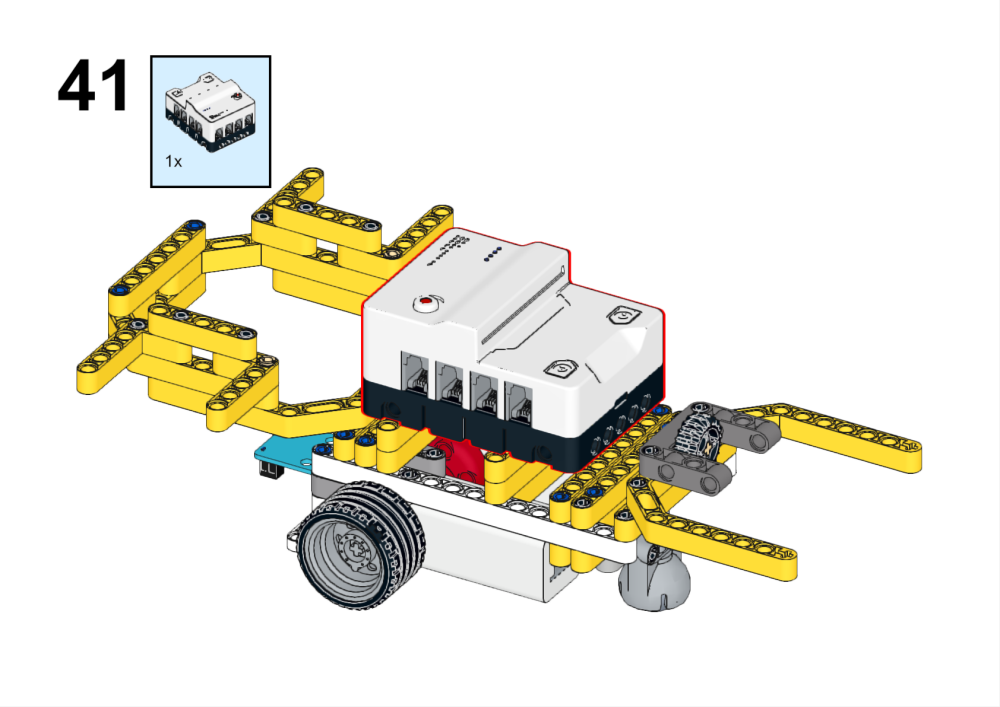
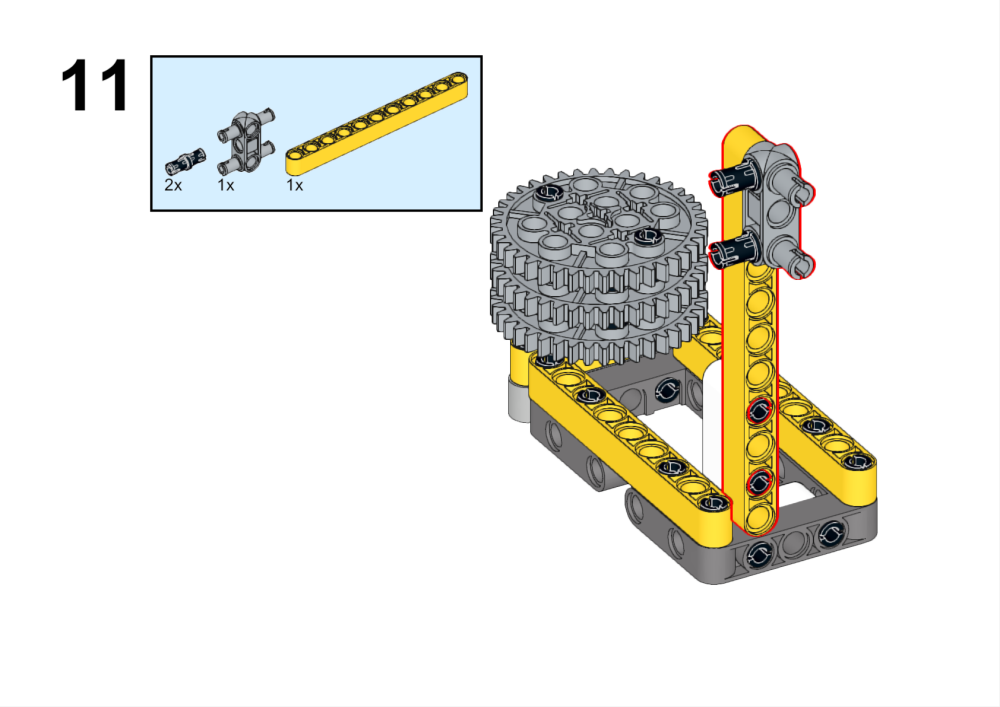
案例搭建
根据现有登月探测器形式和组成,请开放讨论并合理设计积木登月探测器。
示例
登月探测器示例











































释放登月舱轨道点标识物















代码编程
添加软件库
进入“makecode.microbit.org”,点击新建项目。
在弹出窗口输入项目名称并点击创建。

点击代码抽屉中的扩展。

在弹出界面输入 nezha2 并点击搜索图标,在显示 nezha2 软件库后点击。同样的方式加载 PlanetX 软件库。

元器件连接
请参考下面连线图,将元器件连接到对应的接口:

示例程序

参考程序链接:https://makecode.microbit.org/_e329vvKt0cub
 请根据课堂实际情况适当调整行星系列智能积木马达速度。
请根据课堂实际情况适当调整行星系列智能积木马达速度。
下载程序
使用 USB 线连接 PC 和 micro:bit V2。

连接成功后,电脑上会识别出一个名为 MICROBIT 的盘符。

点击左下角的 ,选择Connect Device。
,选择Connect Device。

点击 。
。

点击 。
。

在弹出窗口选择 BBC micro:bit CMSIS-DAP,然后选择连接,至此,我们的 micro:bit 就已经连接成功。

点击下载程序

团队合作与展示
学生分成小组,共同完成登月探测器的制作和程序编写。
鼓励学生之间相互合作、交流和分享经验。
每个小组有机会向其他小组展示他们制作的登月探测器,并演示。
预期效果:开机后,登月探测器沿着轨道滑行,遇到障碍物停止。

总结与反思
回顾课程内容,提醒学生掌握了哪些知识和技能。
引导学生讨论他们在制作过程中遇到的问题和困难,以及如何解决这些问题。
引导学生思考登月探测器的优化和改进方向,比如还能制作哪些有趣的案例。
扩展知识
登月探测器是用于探索月球表面、进行科学研究和收集数据的航天器。它们可以分为多种类型,包括硬着陆的撞击探测器、软着陆的着陆器、月球车(巡视器)、轨道飞行器等。下面将详细介绍登月探测器的组成、工作原理以及一些相关背景。
登月探测器的组成
登月探测器的组成因具体任务而异,但一般包括以下几个主要部分:
- 着陆器:用于在月球表面实现软着陆,承载科学仪器和可能的巡视器。着陆器通常装备有反推火箭、着陆腿、缓冲系统和导航与控制系统。
- 巡视器(月球车):从着陆器释放,用于在月球表面移动,进行实地考察,采集样本,拍摄照片,进行地质分析等。
- 轨道飞行器:围绕月球运行,进行全球遥感观测,绘制地形图,研究月球磁场、重力场和成分等。
- 通信系统:用于与地球控制中心建立联系,发送数据和接收指令。
- 电源系统:通常使用太阳能电池板或放射性同位素热电发生器(RTG)为探测器提供能源。
- 科学载荷:包括各种科学仪器,如照相机、光谱仪、雷达、地震仪、磁力计等。
- 推进系统:用于轨道修正、姿态控制和着陆减速。
当登月探测器脱离运载火箭后,它依靠之前获得的动能继续向月球行进。一旦探测器接近月球,它必须执行一系列复杂的机动以被月球的引力所捕获,并进入一个稳定的环月轨道。这一过程被称为“月球捕获”(Lunar Capture),主要包括以下步骤:
- 地月转移轨道 (TMI): 探测器首先通过运载火箭的多次点火,进入一个能够将其送向月球的地月转移轨道。这个轨道通常是抛物线或椭圆形的,允许探测器以相对较低的能量消耗前往月球。
- 中途修正 (MCC): 在前往月球的过程中,探测器可能需要进行中途修正,这是为了调整其飞行路径,确保能够准确地进入月球的引力影响范围内。这些修正通常通过小型推进器完成。
- 近月制动 (LOI): 当探测器接近月球时,它必须进行所谓的近月制动(Lunar Orbit Insertion, LOI)。这是通过短暂启动主引擎,减缓探测器的速度,使其进入月球的引力范围之内,而不是直接飞过月球。减速度的精确计算和执行对于成功进入环月轨道至关重要。
- 环月轨道调整: 成功进入环月轨道后,探测器可能还需要进一步调整其轨道的高度和倾斜度,以便执行特定的科学任务或准备着陆。这可以通过轨道机动燃烧(Orbital Maneuvers)来完成,通常使用较小的推进器进行微调。
相关背景
登月探测始于冷战时期的太空竞赛,美国的阿波罗计划和苏联的月球计划是其中的亮点。阿波罗11号在1969年首次将人类送上月球,而苏联的月球2号则是首个硬着陆在月球表面的探测器。
近年来,多个国家和地区重新关注月球探索,包括中国、印度、日本、欧洲航天局和私人企业如SpaceX。中国的嫦娥系列探测器,如嫦娥三号、嫦娥四号和嫦娥五号,分别实现了月球软着陆、月球背面着陆和月球样本返回等重大突破。
登月探测器的任务不仅是科学研究,还包括技术验证、资源勘探和未来的月球基地建设,为人类的长期太空探索奠定基础。