Case 07 Walk The Grid
Introduction
This course aims to enable students to learn and explore the relevant knowledge points of trolley motor control and program design and apply this knowledge to realize the function of the trolley driving according to the preset grid.

teaching objectives
Understand the principles and methods of trolley motor control, and learn to control the trolley's forward, backward and stop.
Teaching Preparation
Cutebot Pro × 1
micro:bit × 1
Teaching Process
Course Introduction
Hello everyone! Today we will continue our smart car making project and add a new function to the car. Have you ever thought about how to make the car drive according to our preset grid?
We can control the car to travel according to a certain number of steps and step length by writing a program, so as to achieve the effect of preset grid travel.
Sample Code
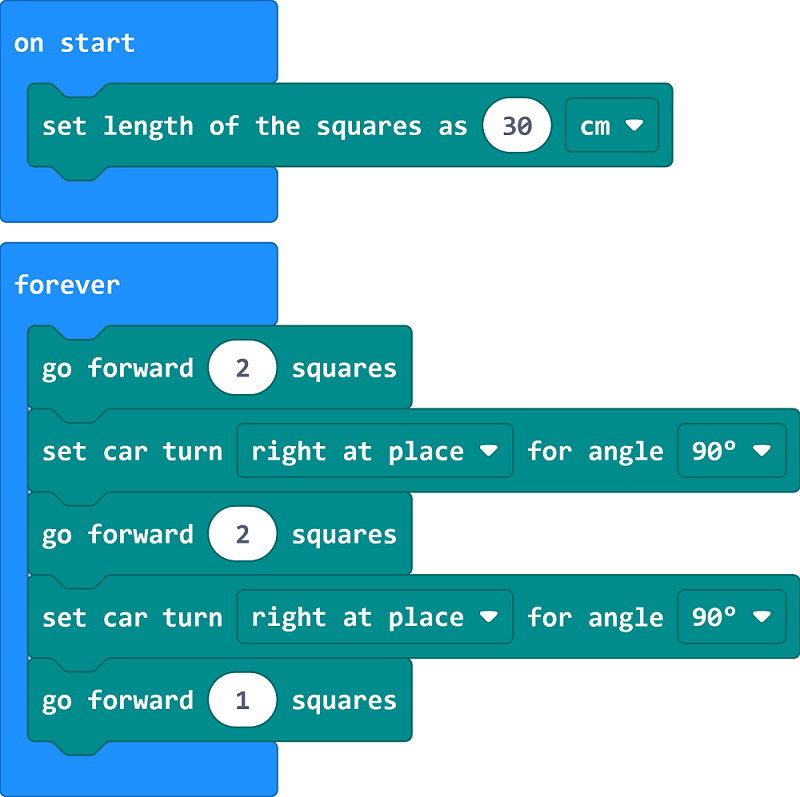
Link:https://makecode.microbit.org/_V5pY4b6eJPhc
You can also download the program directly from the following web page.
Teamwork and Presentation
Students are divided into groups to complete the production and programming of the car together.
Students are encouraged to collaborate, communicate and share experiences with each other.
Each team has the opportunity to show the smart car they made to other teams and demonstrate the effect of the car driving according to the preset grid.
Summary and Reflection
Review course content to remind students of what knowledge and skills they have acquired.
Guide students to discuss the problems and difficulties they encountered in the production process, and how to solve these problems.
Guide students to think about the direction of improvement of the precision and control ability of the car, and how to optimize the driving effect and stability of the car.
outreach activities
Challenge students to design more complex lattice travel paths.
Guide students to think about how to use sensors or other modules to assist the precise control of the car in the grid.
Encourage students to use creativity and imagination to design their own unique car driving patterns and path planning.