案例四:引体向上机器人
案例简介
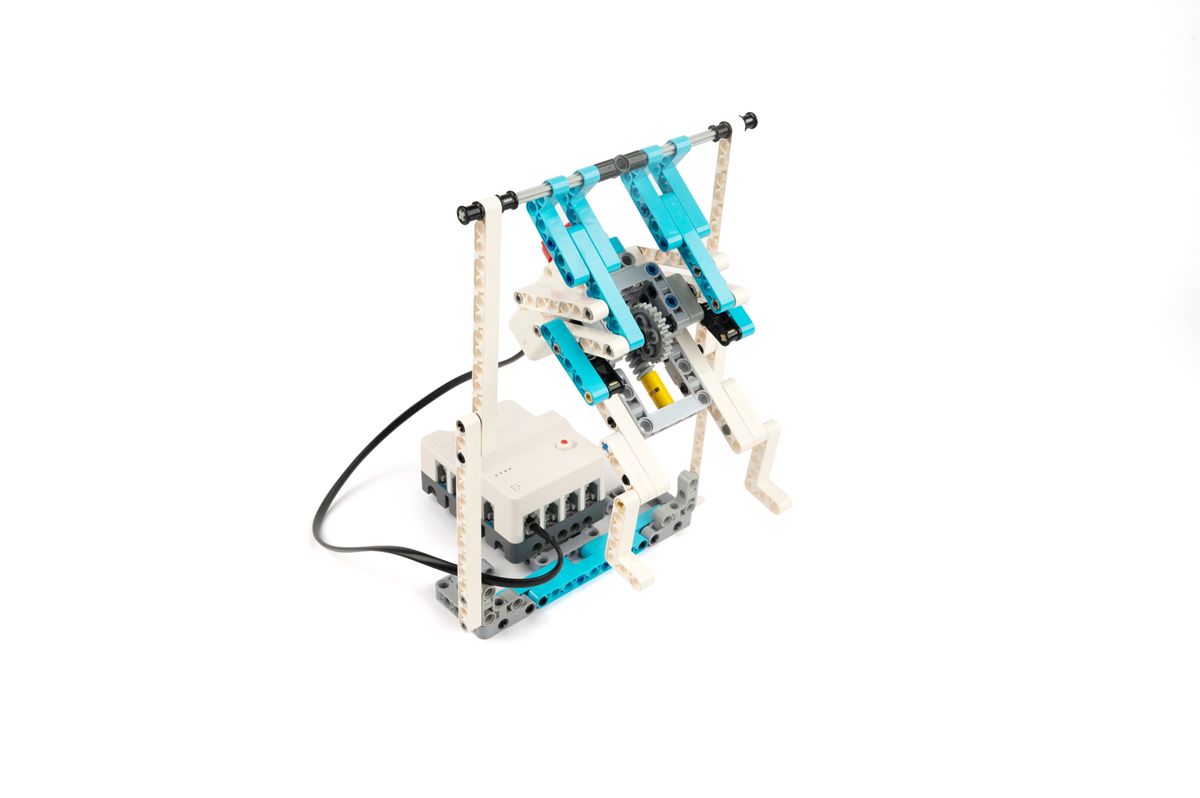
设计一款引体向上机器人,模拟引体向上动作。
教学准备
| 名称 | 图示 |
|---|
| 哪吒Pro运动套装 |  |
教学目标
了解涡轮蜗杆的特性及搭建方式
激发对工程和机器人技术的兴趣。
课程引入
欢迎小朋友们加入我们的STEAM奇妙旅程!今天,我们将一起探索如何制作一个无需编程的引体向上机器人。在这个项目中,我们将学习到如何通过简单的机械传动来控制机器人的运动。不需要复杂的编程知识,只需动手组装和调整,你就能创造出一个引体向上机器人。让我们一起开启这段激动人心的STEAM学习之旅,激发你的创造力和解决问题的能力!
学习探究
涡轮蜗杆的特性是什么?
搭建步骤