Case 03 Smart Cart with Bricks Mechnical Claw
Purpose
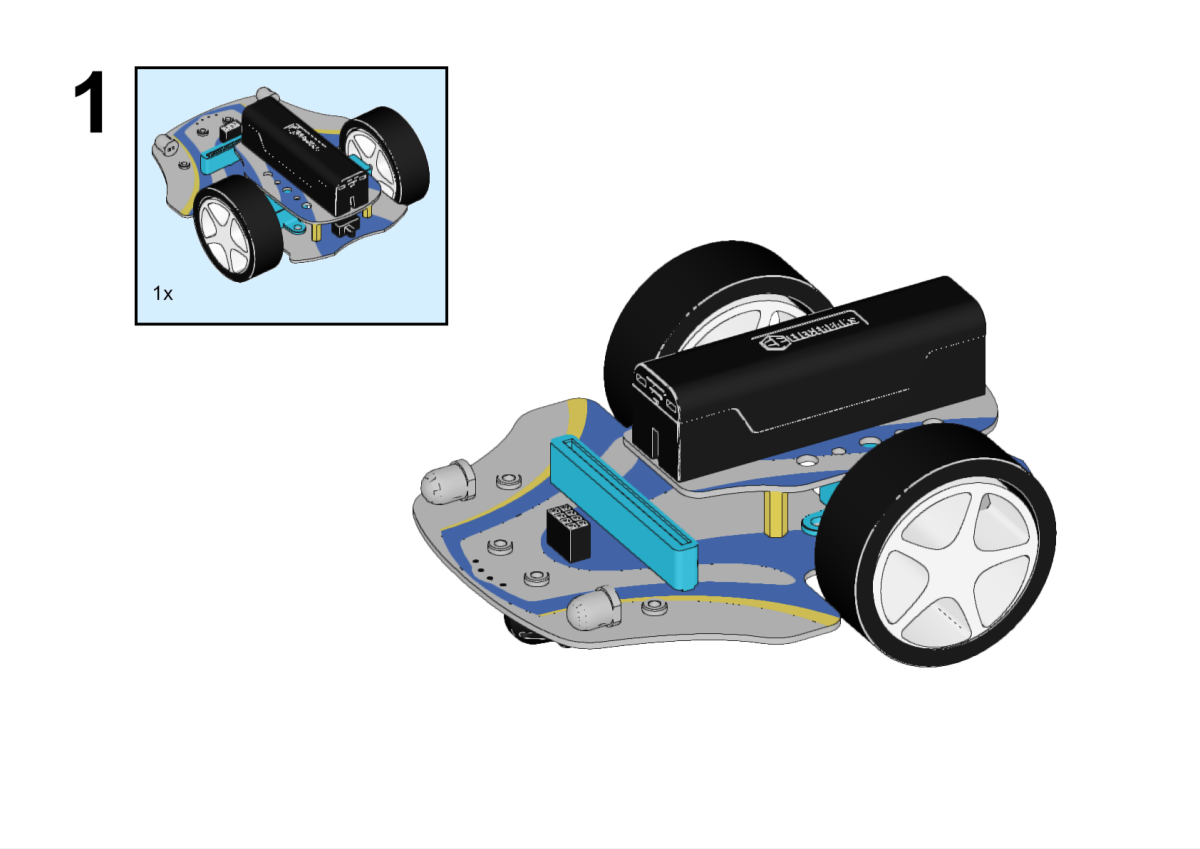
To build a smart Cutebot Pro cart with a mechnical claw with bricks.

Materials Requested
ELECFREAKS micro:bit Joystick:bit V2 Kit
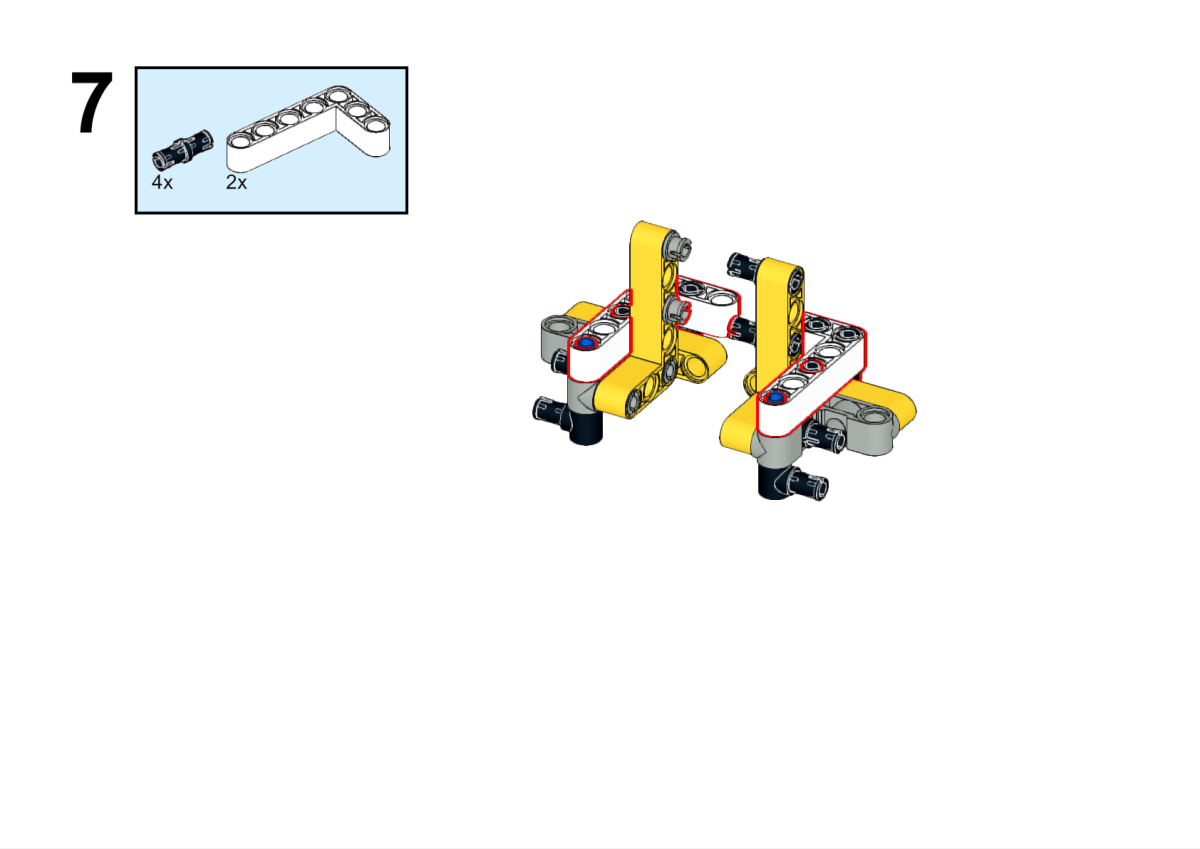
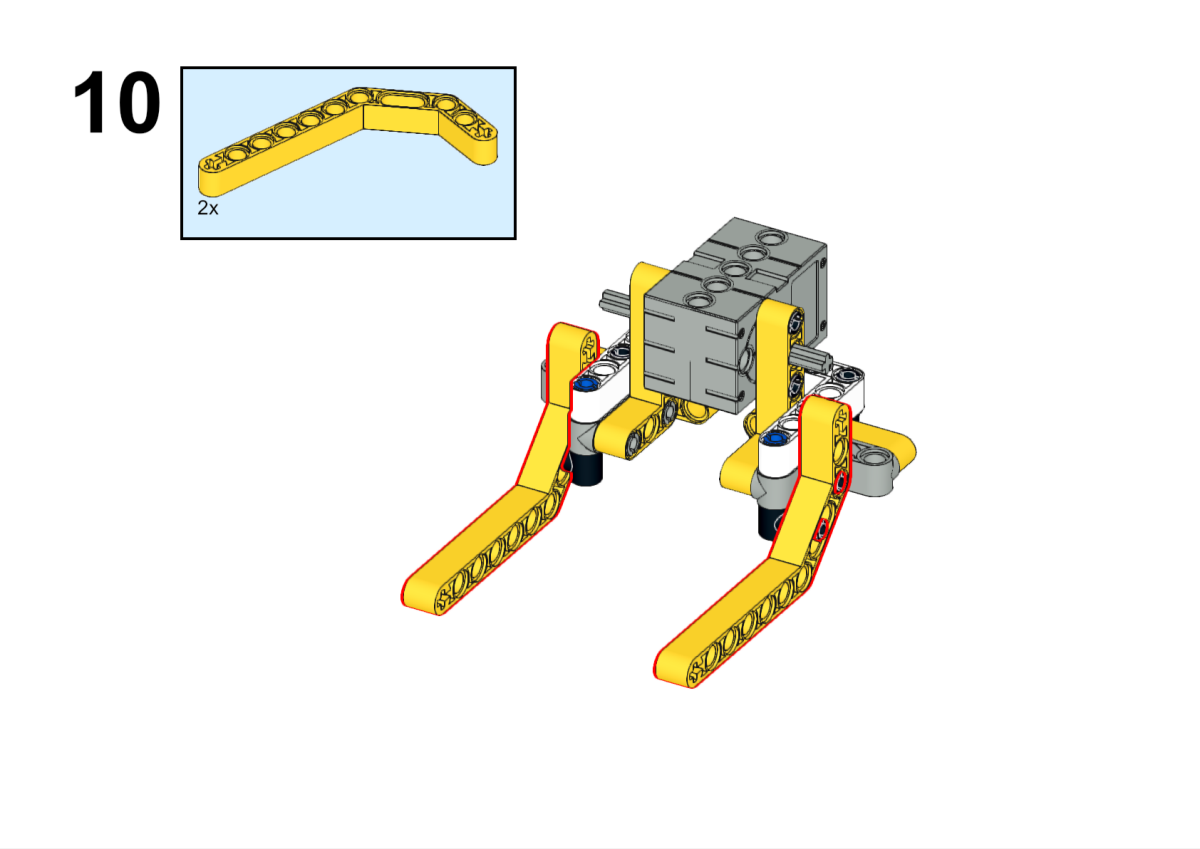
Assembly Steps











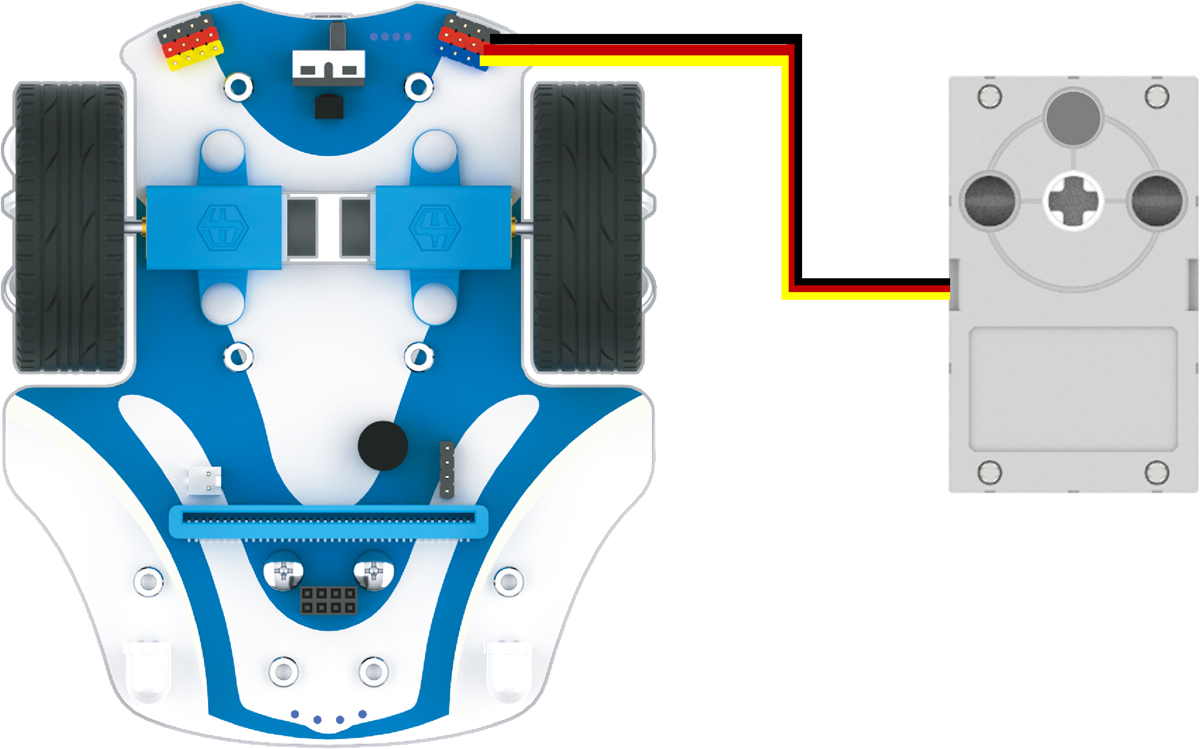
Hardware Connections
Connect the servo to the S1 port on Cutebot Pro.
Software
Code
Click "extensions" in the makecode drawer to see more choices.

We need to add a package for programming the Cutebot pro. Click "extensions" at the bottom of the drawer and seach with "cutebot pro" to download it.

We need to add a package for programming the Joystick:bit V2. Click "extensions" at the bottom of the drawer and seach with "joystickbit" to download it.

Code Examples
Joystick bit

Program
Link: https://makecode.microbit.org/_DHyiYdULjKg0
You may download it directly below:
Cutebot Pro

Program
Link: https://makecode.microbit.org/_dfmJjPJ1yMqp
You may download it directly below:
Conclusion
Control the route of the Cutebot pro with the Joystick, while pressing button C, the claw will clamp the objects; while releasing it, the claw will release the objects too.

Expanded Knowledge
Development of remote-controlled mechanical gripper trolleys
Remote controlled mechanical gripper trolleys are constantly evolving in terms of both technology and applications. The following are some of the major trends in this field:
Autonomy and Intelligence: with the advancement of artificial intelligence and autonomous navigation technologies, remotely operated mechanical gripper trolleys are moving towards autonomy and intelligence. They can be equipped with sensors, vision systems and machine learning algorithms to achieve autonomous navigation and environment awareness capabilities, reducing reliance on operators and improving efficiency and safety.
Multi-functional and modular design: In order to adapt to different application requirements, RC gripper trolleys are increasingly focusing on multi-functional and modular design. This means that different types of mechanical grippers and attachments can be flexibly replaced, upgraded or added to fulfil a wider range of tasks, depending on the needs of the specific task.
Energy efficiency and long range: With improved battery technology and optimised energy management systems, the energy efficiency and range of remotely operated mechanical gripper trolleys continues to improve. This allows them to continue working for longer periods of time, reducing the frequency of recharging or replacing batteries and improving efficiency and ease of use.
IoT and Cloud Platform Integration: Integration of remote-controlled mechanical gripper trolleys with IoT and cloud platforms is also one of the developing trends. By connecting the trolley to the Internet, functions such as remote monitoring, data sharing and remote operation can be realised. Meanwhile, the cloud platform can provide services such as data storage and analysis, remote control and task scheduling to further enhance the intelligence and collaboration capabilities of the trolley.
New materials and structural design: In order to improve the load capacity, stability and durability of the mechanical claw trolley, research on new materials and structural design is also underway. Innovations in lightweight materials, high-strength structures and flexible mechanical claw design can make the trolley more adaptable to a variety of complex environments and task requirements.
Overall, the development trend of remote-controlled mechanical claw trolleys is towards autonomy, intelligence, multifunctionality and energy efficiency. This will provide more opportunities and solutions for applications in various fields, and promote its wide application in industry, agriculture, warehousing, rescue and other fields.