Case 02 Patrol at a fixes distance
Introduction
This course is designed to introduce students to the concepts of graphical programming and encoder motors. Students will use the Cutebot Pro to learn how to write programs to control the distance travelled by the cart.

Teaching objectives
Understand the basic concepts of graphical programming and coding motors.
Learn to use Makecode software to create programs to control the distance travelled by the trolley.
Teaching preparation
Cutebot Pro × 1
micro:bit × 1
Teaching process
Introduce
In this lesson we will explore how to control the distance travelled by the Cutebot Pro smart car through a graphical program. Are you curious about how to use programming to precisely control the distance travelled by a small car?
Now, let's get to know the Cutebot Pro smart car. It is a special car with an encoder motor that allows precise control of the distance travelled. This means that we can program it to travel a specific distance, whether it is 100 cm or 10 cm, and we can control it very accurately.
In this lesson, we will learn how to write a program to precisely control the distance travelled and verify that our program works by putting it into practice.
Now, let's get hands-on! Ready to explore the world of graphical programming with the Cutebot Pro smart car? Let's start this creative and fun learning journey together!
Exploration
How can I use the graphical programming module to control the distance travelled by the trolley?
Is it possible to control the distance travelled by the trolley by adjusting the parameters in the program?
What are the practical application scenarios for the technique of precise distance control?
Samples
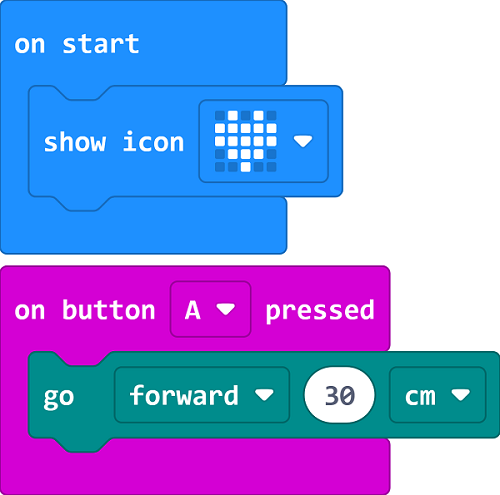
Reference: https://makecode.microbit.org/_Ethe7heqtXbi
You may download it directly:
Teamwork and demonstration
Students break into small groups and work together to build and program the carts.
Students are encouraged to collaborate, communicate and share their experiences with each other.
Each group will have the opportunity to present the smart car they have made to the other groups.
Conclusion and reflection
Review the content of the lesson and remind students what knowledge and skills they have acquired.
Lead students to discuss the problems and difficulties they encountered in making the trolley and how they solved these problems.
Lead students to think of further applications for the trolley to travel accurately.